DarwinFPV GM8 Анти-помеховый GPS-модуль для дрона - UBLOX GPS/GLONASS, 10Гц, 5В, MX1.25-4
DarwinFPV GM8 Анти-помеховый GPS-модуль для дрона - UBLOX GPS/GLONASS, 10Гц, 5В, MX1.25-4
DarwinFPV
Не удалось загрузить сведения о доступности самовывоза
Обзор
DarwinFPV Анти-Интерференционный Дрон GPS (GM8) - это модуль GPS для дронов, основанный на аппаратном решении GPS для воздушных дронов, использующий технологии многочастотного сильного подавления помех и обнаружения и устранения многопутевых сигналов для более стабильного и надежного позиционирования. Его коммуникационный протокол модифицирован для совместимости с BetaFlight, что делает его подходящим для FPV дронов, требующих стабильной работы GPS.
Ключевые особенности
- Технология устранения сильных помех с многочастотным сигналом и технология обнаружения и устранения многопутевых сигналов для повышения стабильности
- Антенна с высоким коэффициентом усиления и всенаправленная для более стабильного приема сигнала
- Протокол связи, совместимый с BetaFlight (UBLOX)
- Поддержка GPS/ГЛОНАСС
Технические характеристики
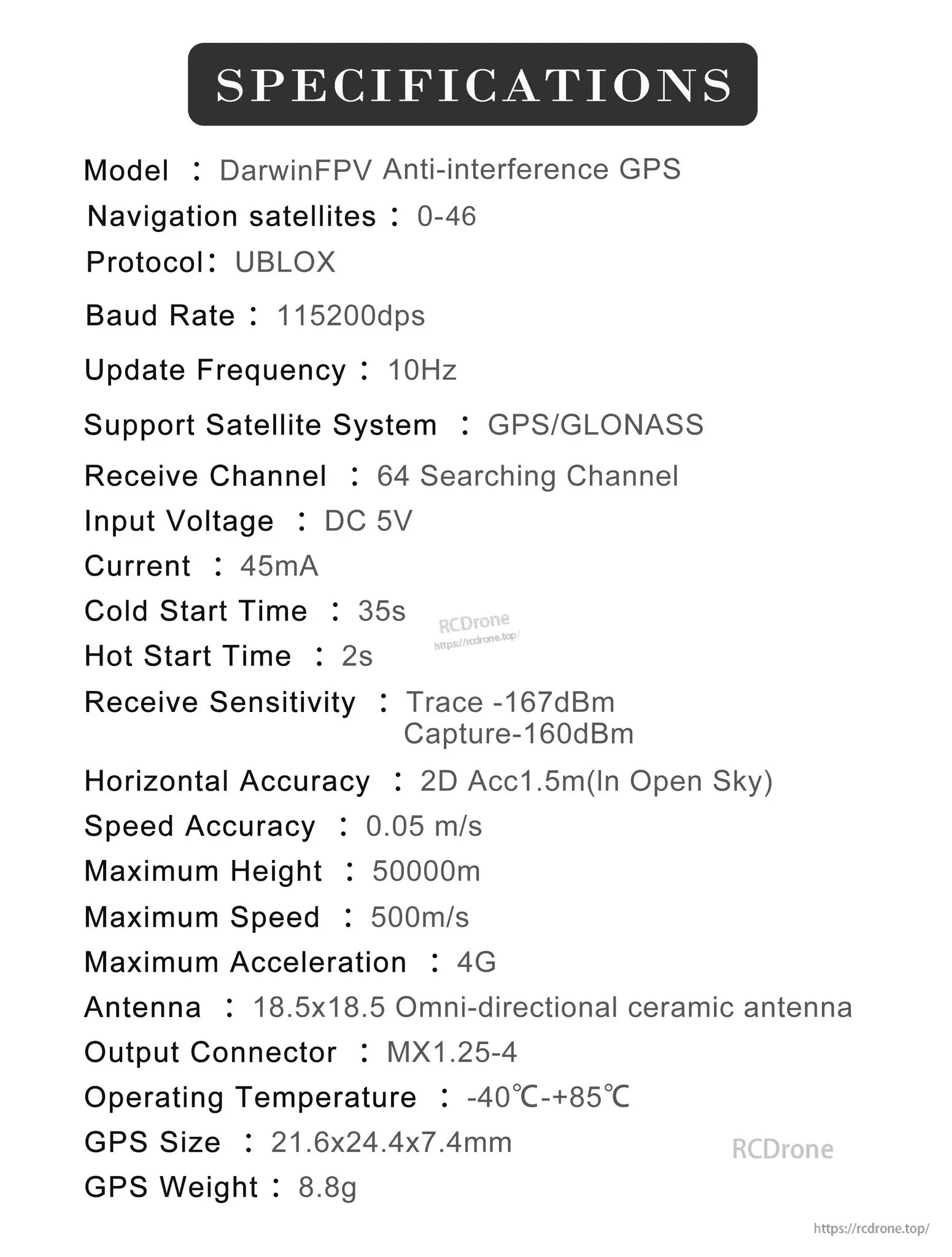
| Модель | DarwinFPV Антиинтерференционный GPS |
| Навигационные спутники | 0-46 |
| Протокол | UBLOX |
| Скорость передачи данных | 115200dps |
| Частота обновления | 10Гц |
| Поддерживаемая спутниковая система | GPS/ГЛОНАСС |
| Канал приема | 64 канала поиска |
| Входное напряжение | DC 5V |
| Ток | 45мА |
| Время холодного старта | 35с |
| Время горячего старта | 2с |
| Чувствительность приема | Трасса -167дБм; Захват -160дБм |
| Горизонтальная точность | 2D Acc1.5м (На открытом воздухе) |
| Точность скорости | 0.05 м/с |
| Максимальная высота | 50000м |
| Максимальная скорость | 500м/с |
| Максимальное ускорение | 4G |
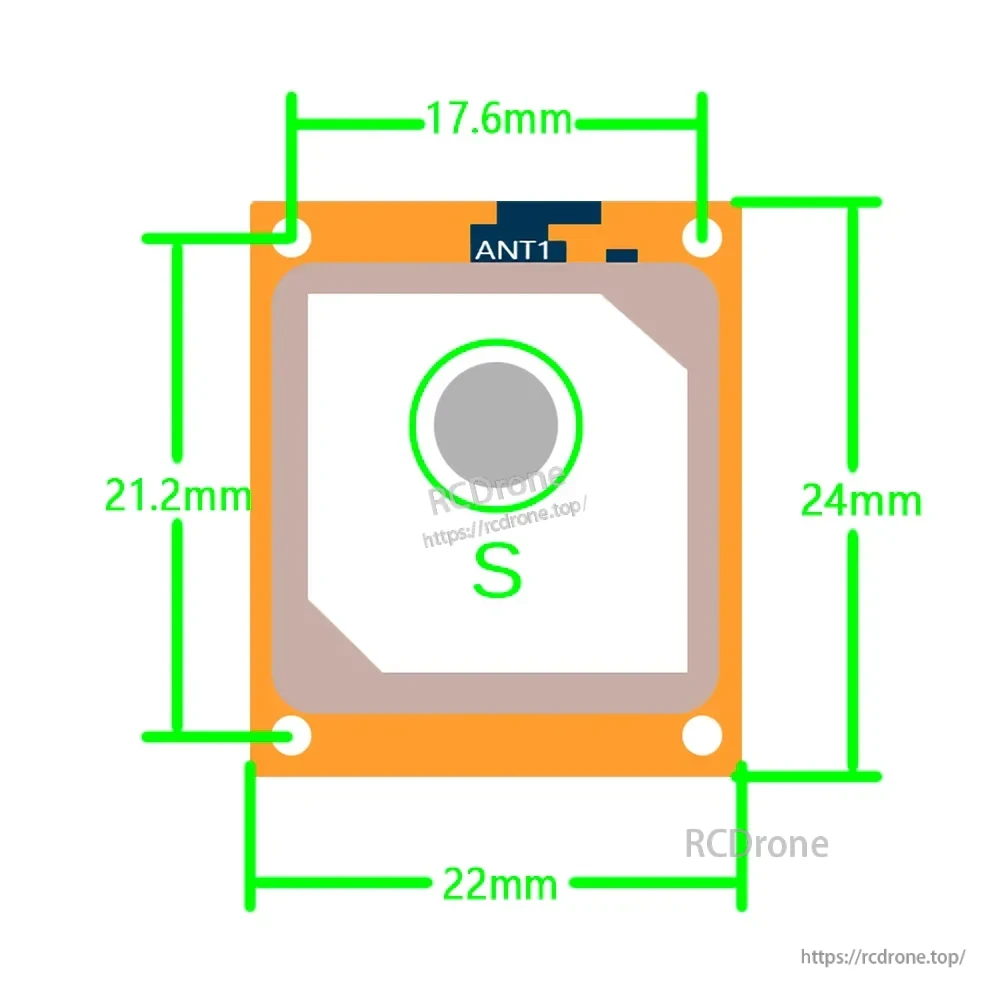
| Антенна | 18.5x18.5 Омни-направленная керамическая антенна |
| Выходной разъем | MX1.25-4 |
| Рабочая температура | -40°C-+85°C |
| Размер GPS | 21.6x24.4x7.4мм |
| Вес GPS | 8.8г |
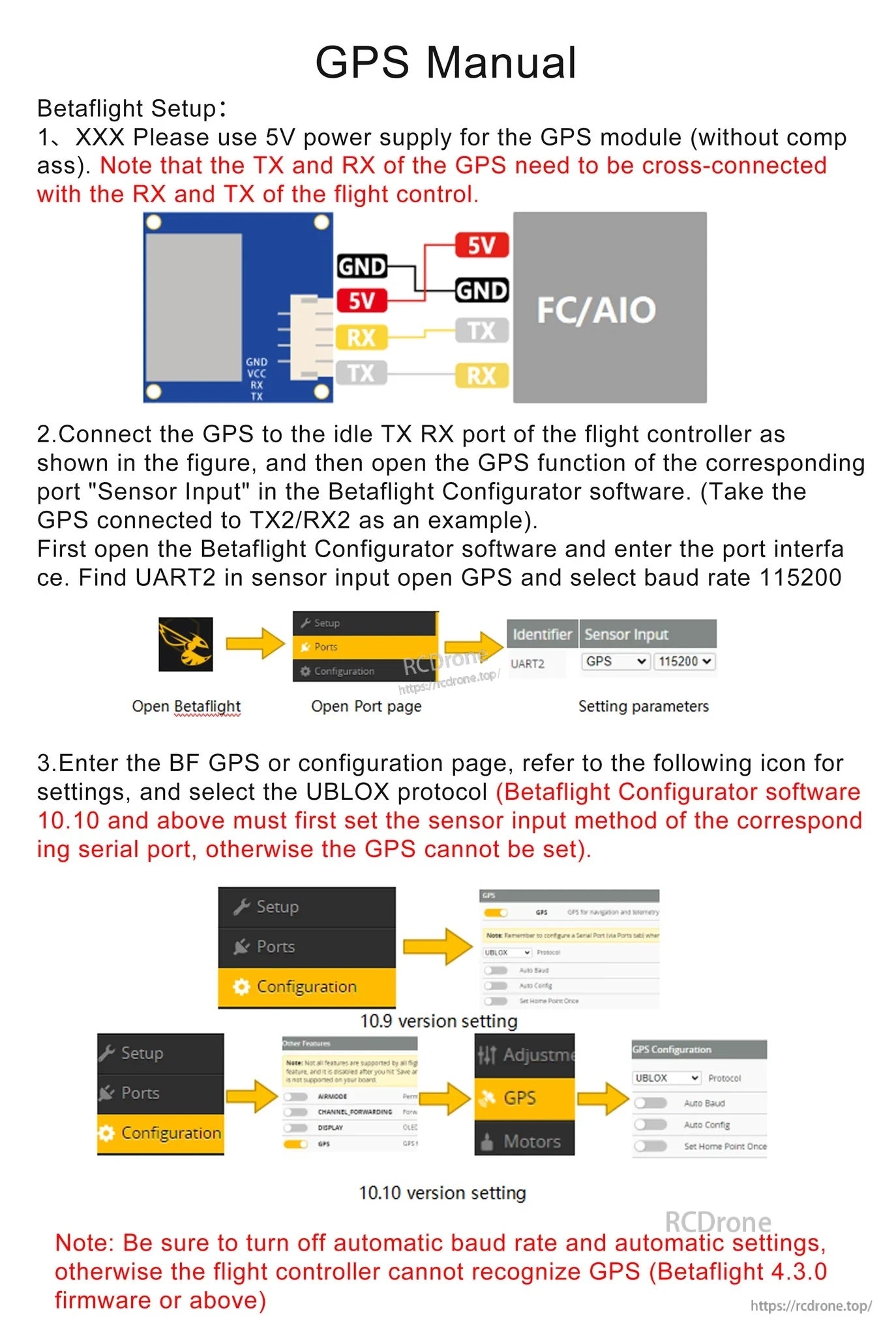
Примечания по настройке (BetaFlight / INAV)
- Используйте источник питания 5В для модуля GPS.
- TX и RX должны быть перекрестно соединены между GPS и контроллером полета (GPS TX к FC RX, GPS RX к FC TX).
- В BetaFlight Configurator / INAV Configurator включите GPS на выбранном последовательном порту (пример: TX2/RX2) и установите скорость передачи данных на 115200.
- Выберите UBLOX в качестве протокола GPS.
- Отключите автоматическую скорость передачи данных и автоматические настройки, если контроллер полета не может распознать GPS (отмечено для прошивки BetaFlight 4.3.0 или выше).
- Не ищите спутники GPS для позиционирования в помещении; тестируйте на улице в открытой местности.
Что включено
- 1 x DarwinFPV GM8 Антиинтерференционный GPS для дронов
- 1 x MX1.25_6P к SH1.0_4P соединительный кабель
- 1 x Наклейка
Для помощи с установкой или конфигурацией свяжитесь с [email protected] or посетите https://rcdrone.top/ .
Детали
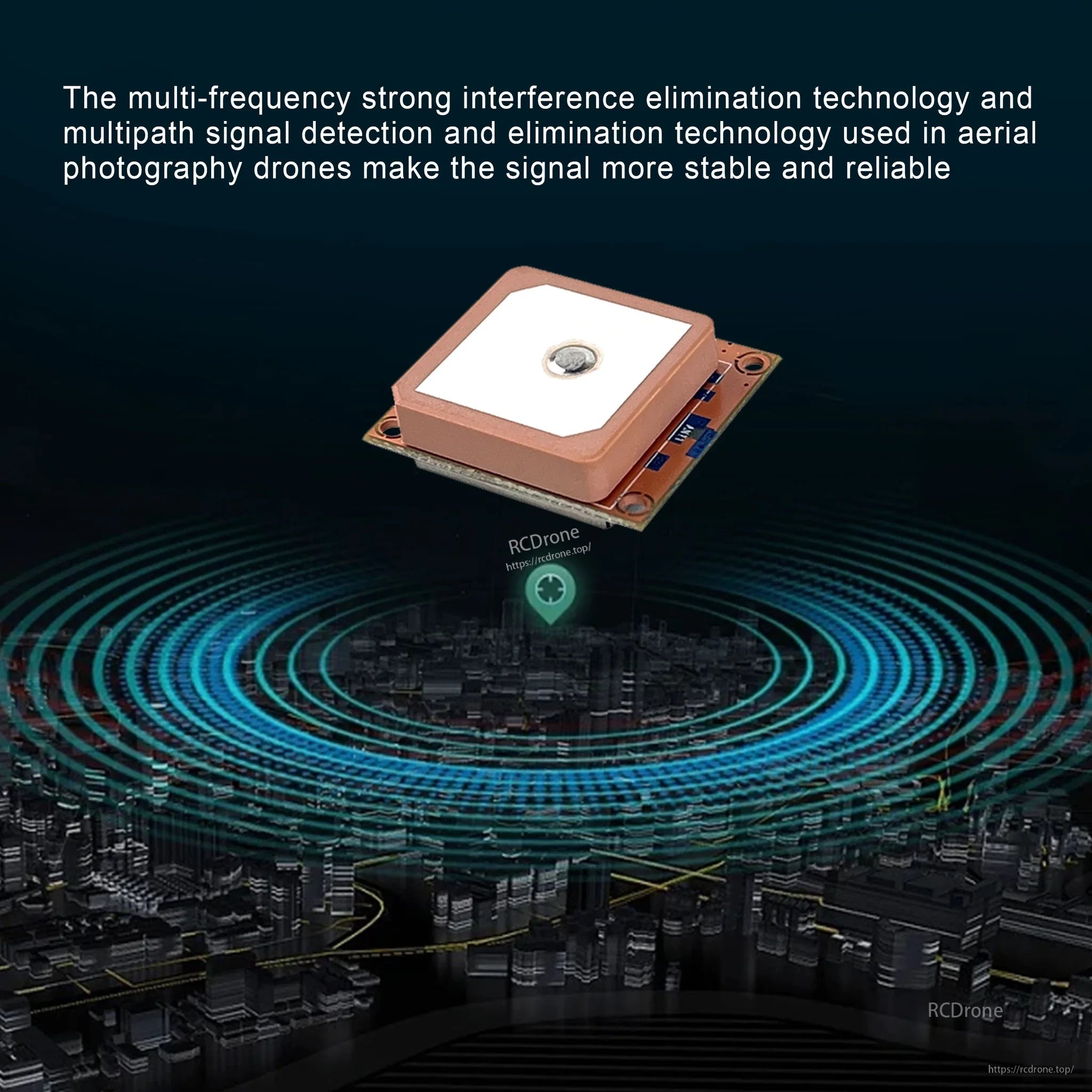
Многочастотная фильтрация помех помогает поддерживать более стабильное GPS-соединение для FPV полетов в сложных радиочастотных условиях.

Антенна с высоким коэффициентом усиления в керамическом корпусе обеспечивает более стабильный прием спутников во время полета.


Ключевые характеристики перечислены для быстрого планирования настройки, включая протокол UBLOX, 115200 бод и обновления 10 Гц.
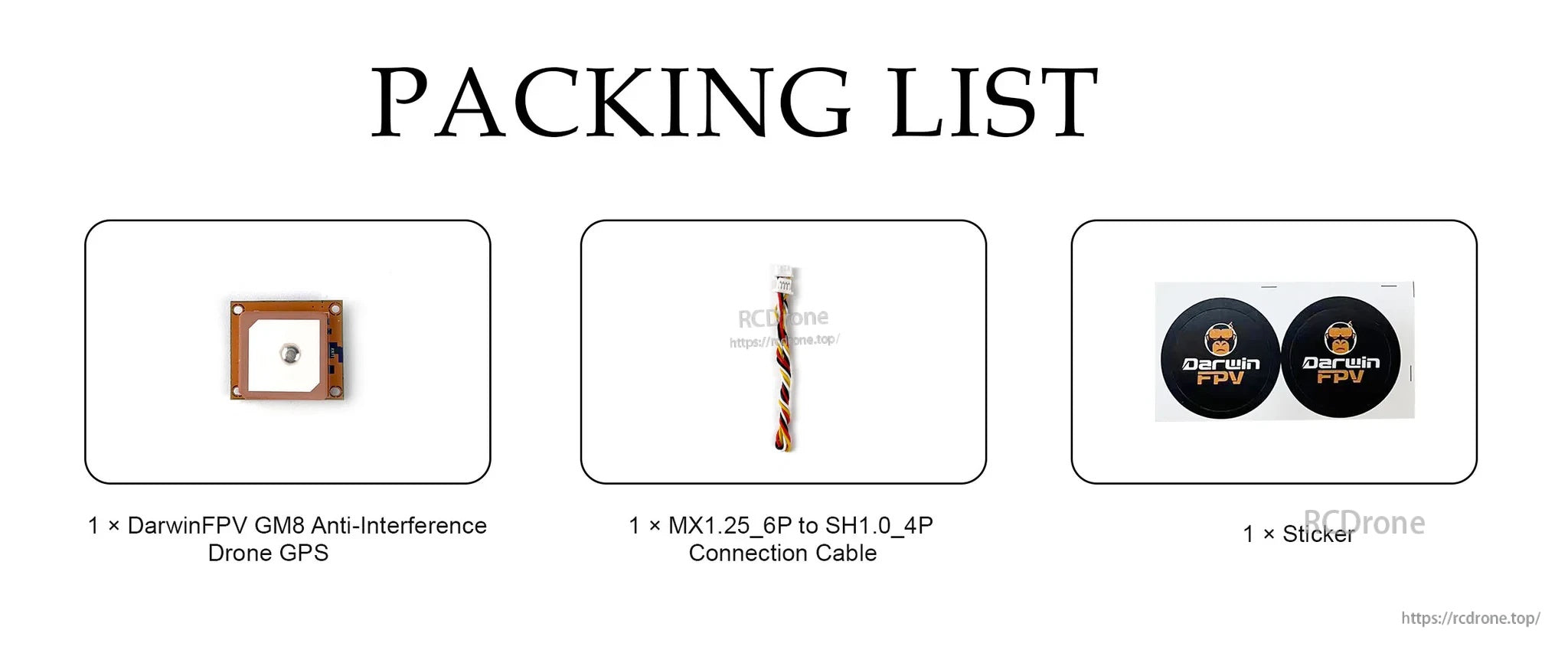
В коробке находится модуль GPS GM8 и соединительный кабель для подключения к стандартным портам контроллера полета.
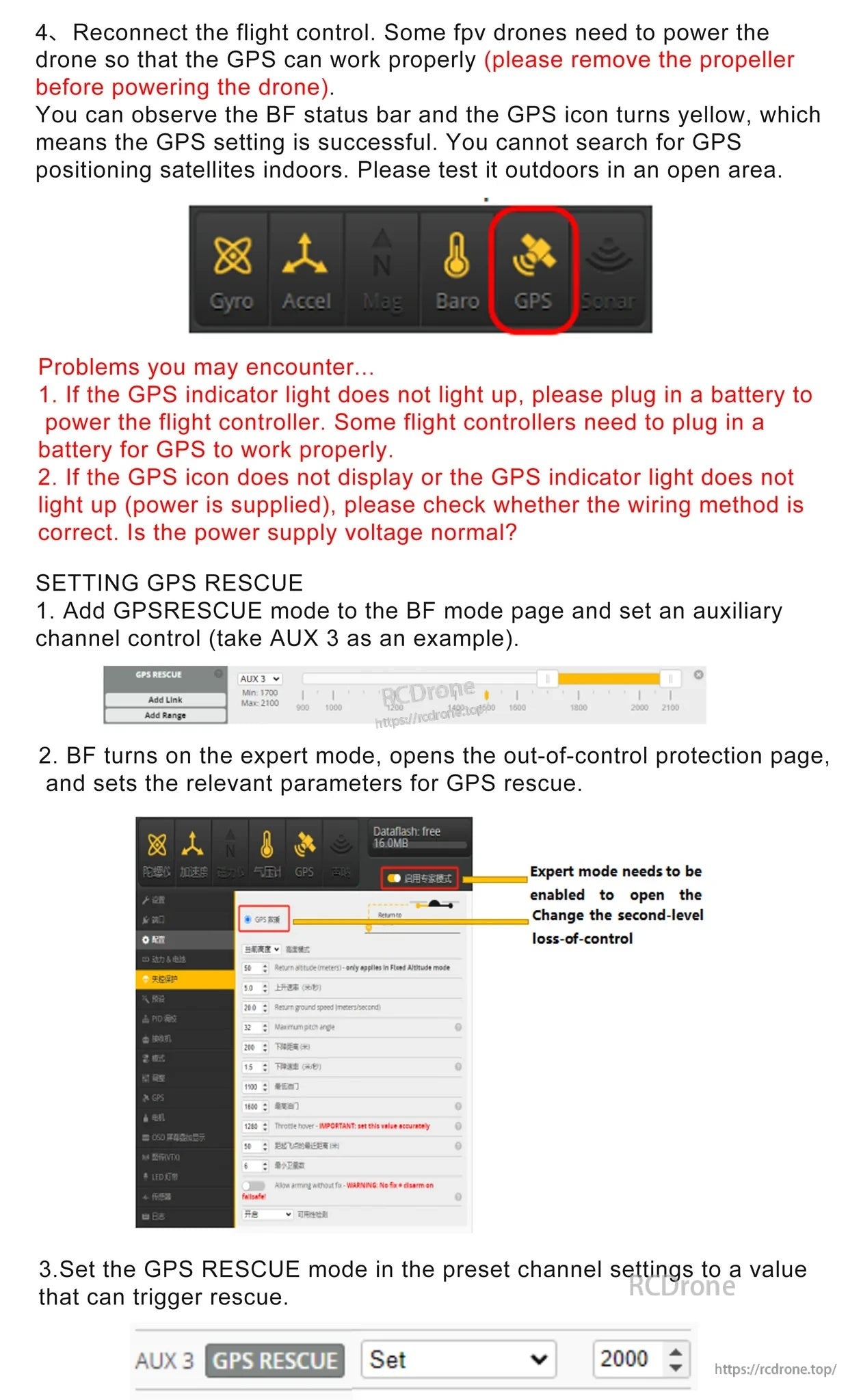
Примечания BetaFlight содержат общие шаги по устранению неполадок и настройке GPS Rescue после подключения и обнаружения модуля.

Related Collections