F450-4B Комплект для разработки программируемого дрона Raspberry Pi — Pixhawk DIY Ardupilot Промышленные платформы для дронов с открытым исходным кодом
F450-4B Комплект для разработки программируемого дрона Raspberry Pi — Pixhawk DIY Ardupilot Промышленные платформы для дронов с открытым исходным кодом
RCDrone
Не удалось загрузить сведения о доступности самовывоза
Обзор
The Ф450-4Б Raspberry Pi Дрон это продвинутый Комплект для самостоятельного изготовления дрона который сочетает в себе мощный Raspberry Pi 4B бортовой компьютер с универсальным Контроллер полета Pixhawk 2.4.8, что делает его легко настраиваемым и программируемый дрон платформа. Это Платформа для дронов с открытым исходным кодом поддерживает передовые инструменты, такие как Dronekit-python, что позволяет разработчикам создавать автономные миссии, передачу данных в реальном времени и приложения для обработки изображений на базе искусственного интеллекта. Благодаря прочной раме 450 мм, камере HD 200 Мп, аккумулятору 3S 5200 мАч для полета до 20 минут и расширенным режимам полета, таким как удержание высоты, возврат домой и режим круга, комплект дрона F450 является идеальным выбором для энтузиастов, исследователей и преподавателей, ищущих инновационный опыт разработки дронов.
Основные характеристики
Высокопроизводительное оборудование
- Raspberry Pi 4B: Оснащен 64-битным четырехъядерным процессором с тактовой частотой 1,5 ГГц, поддерживающим вывод видео 4K и высокоскоростную связь по Wi-Fi для надежной работы.
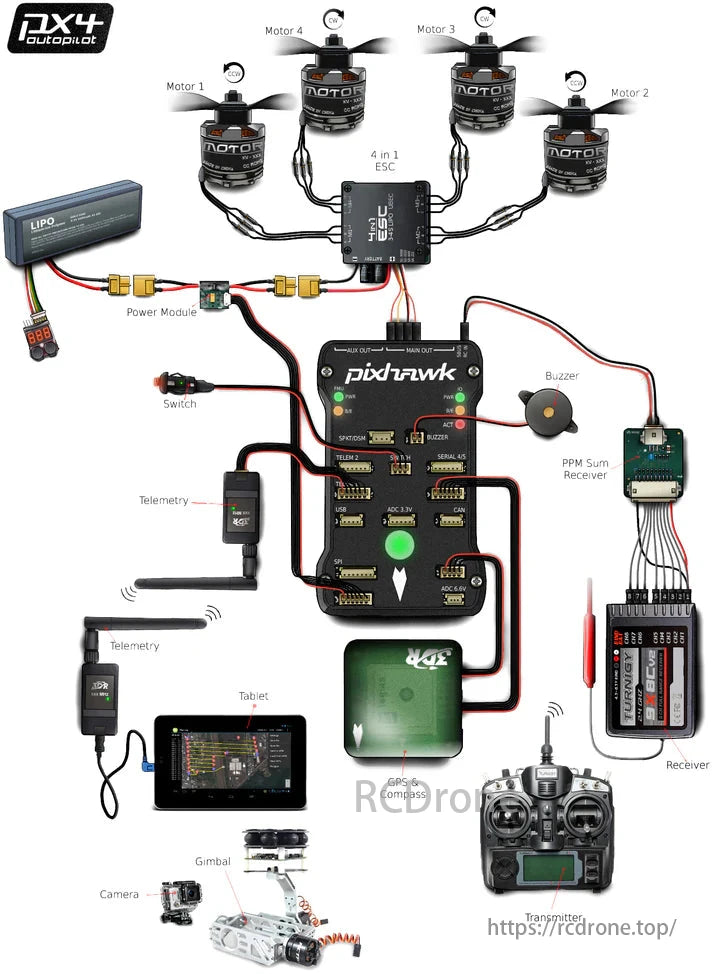
- Контроллер полета Pixhawk 2.4.8: Оснащен несколькими встроенными датчиками, обеспечивающими точное управление ориентацией, зависанием и планированием миссии.
- Поддержка расширения Vision: В сочетании с монокулярной камерой и инструментами OpenCV этот комплект отвечает потребностям передачи и обработки изображений в реальном времени.
Разнообразные режимы полета
- Удержание высоты (AltHold): Поддерживает стабильную высоту полета.
- Наведите курсор: Обеспечивает точное стационарное зависание.
- Возвращение домой (Возврат): Автоматический возврат в исходную точку при потере сигнала или низком заряде батареи.
- Посадка (Земля): Выполняет плавную автономную посадку.
- Режим стабилизации: Автоматически регулирует положение в полете.
- Круговой режим: Выполняет круговые полеты вокруг цели.
- Режим без головы: Устраняет ограничения направления для более легкого управления.
- Возвращение из-под контроля: Возврат в заданное местоположение при потере сигнала.
- Посадка на малой мощности: Безопасная посадка при низком заряде батареи.
Передача данных и обработка изображений
- Создает локальную сеть WiFi через встроенную точку доступа без необходимости использования внешних маршрутизаторов, обеспечивая передачу данных и изображений в режиме реального времени.
- Поддерживает потоковую передачу и анализ видео на основе OpenCV, идеально подходит для мониторинга изображений и интеллектуальных приложений.
Технические характеристики
Параметры дрона
| Параметр | Подробности |
|---|---|
| Имя | Комплект для дрона F450 |
| Колесная база | 450мм |
| Масса | 1493 г (с аккумулятором и Raspberry Pi 4B) |
| Контроллер полета | Пиксхок 2.4.8 контроллер полета с открытым исходным кодом |
| Бортовой компьютер | Raspberry Pi 4B |
| Камера | 200 МП HD 1080P |
| Поддержка зависания | Оптический модуль потока и лазерный датчик расстояния |
| GPS-модуль | m8n GPS |
| Время полета | ~20 минут (в зависимости от окружающей среды и миссии) |
| Аккумулятор | 3S 5200 мАч (11,1 В) |
| Грузоподъемность | 500г |
| Сопротивление ветру | Уровень 3-4 |
| Мотор | СанниСкай A2212 |
| ЕСК | Hobbywing 20A ESC (поддерживает аккумуляторы 3S-4S LiPo) |
| Пропеллеры | Самоблокирующиеся винты T1045 |
| Макс. высота | 2000 м (без помех) |
| Дальность полета | 1000м |
| Сценарии полета | В помещении / На открытом воздухе |
Технические характеристики контроллера полета Pixhawk 2.4.8
- Процессор: 32-битный ARM STM32F427 Cortex M4, 168 МГц, 256 КБ ОЗУ
- Датчики:
- L3GD20 3-осевой 6DOF гироскоп
- LSM303D 3-осевой 14-битный акселерометр/магнитометр
- MPU6000 6-осевой акселерометр/магнитометр
- Высокоточный барометр MS5611
- Совместимость с наземным управлением: QGroundControl, MissionPlanner
- Размеры: 81 мм x 47 мм x 16 мм; Вес: 37 г
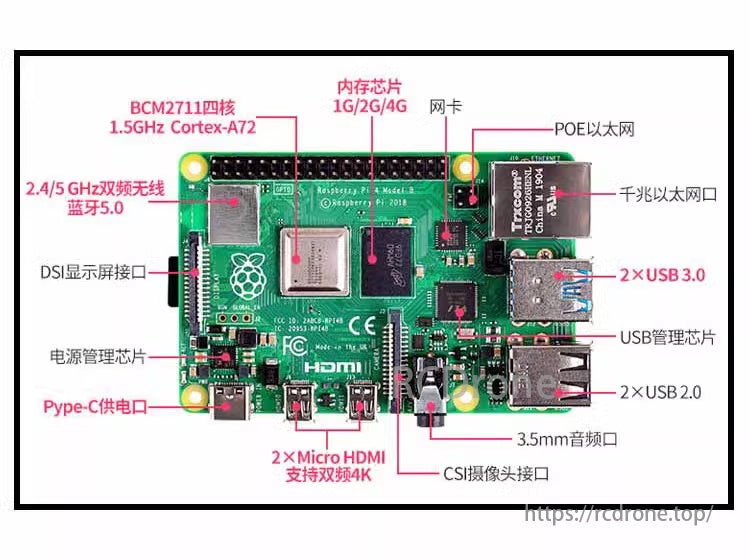
Технические характеристики Raspberry Pi 4B
- Чипсет: Broadcom BCM2711
- Процессор: 64-битный 1,5 ГГц четырехъядерный
- ГПУ: 500 МГц Видеоядро VI
- БАРАН: 4 ГБ DDR4
- Интерфейсы: 2 х USB 3.0, 2 х USB 2.0
- Видеовыход: Два порта micro HDMI, поддерживает 4K@60Hz
- Коммуникация: Bluetooth 5.0, WiFi 5 (2,4/5 ГГц)
- Источник питания: USB Type-C (5 В 3 А)
В пакет включено
Конфигурация 1: двигатель SunnySky A2212 с пультом управления FlySky i6 и телеметрией
- Рама F450 с шасси
- Двигатели SunnySky A2212 (4 шт.)
- Регулятор скорости Hobbywing 20A (4 шт.)
- Самоблокирующиеся винты T1045 (4 пары)
- GPS-модуль PIX M8n
- Виброгасящая пластина
- Пульт дистанционного управления FlySky i6
- Аккумулятор 3S 5200 мАч
- B3 балансировочное зарядное устройство
- GPS-крепление
- Модуль телеметрии напряжения FS

Включено: Ремешки для аккумулятора, нейлоновые стяжки для кабелей, деревянные прокладки, клейкая лента 3M, зуммер, инструменты для установки
Предоставляются видеоролики по сборке и отладке, сопутствующие материалы; для получения исходного кода обратитесь в службу поддержки клиентов.
Конфигурация 2: двигатель SunnySky A2212 с Radiolink PRO
- Рама F450 с шасси
- Двигатели SunnySky A2212 (4 шт.)
- Регулятор скорости Hobbywing 20A (4 шт.)
- 9450 самоблокирующиеся винты (3 пары)
- ПИКС.Комплект GPS-модуля M8n
- Виброгасящая пластина
- Радиолинк ПРО (приемник R9DS)
- Аккумуляторная батарея 3S 2200 мАч
- Аккумулятор 3S 5200 мАч
- B3 балансировочное зарядное устройство
- GPS-крепление

Включено: Ремешки для аккумулятора, нейлоновые стяжки для кабелей, деревянные прокладки, клейкая лента 3M, зуммер, инструменты для установки
Предоставляются видеоролики по сборке и отладке, сопутствующие материалы; для получения исходного кода обратитесь в службу поддержки клиентов.
Сборка комплекта дрона F450
Сценарии применения
Комплект для разработки дрона F450-4B идеально подходит для:
- НИОКР дронов: Университетские исследования, тестирование полетных контроллеров, разработка алгоритмов.
- Интеллектуальные приложения: Планирование пути, распознавание целей и обход препятствий.
- Образовательные эксперименты: Программирование, сборка оборудования и отладка.
- Использование в полевых условиях: зависание в помещении, наружная съемка, сельскохозяйственный мониторинг и многое другое.
Подробности
Платформа для разработки дронов F450-4B Raspberry Pi
F450 — классическая и широко используемая модель дрона, отличающаяся простой и удобной сборкой, высокой экономичностью, высокой практичностью и подходящая новичкам для быстрого начала эксплуатации дронов.

Модернизированный Raspberry Pi 4B
Аппаратная вычислительная мощность Raspberry Pi 4B значительно выше, чем у 3B+.
Raspberry Pi оснащен новейшей системой с открытым исходным кодом Убунту 20.04, что обеспечивает более плавную работу по сравнению с системой Ubuntu Mate.

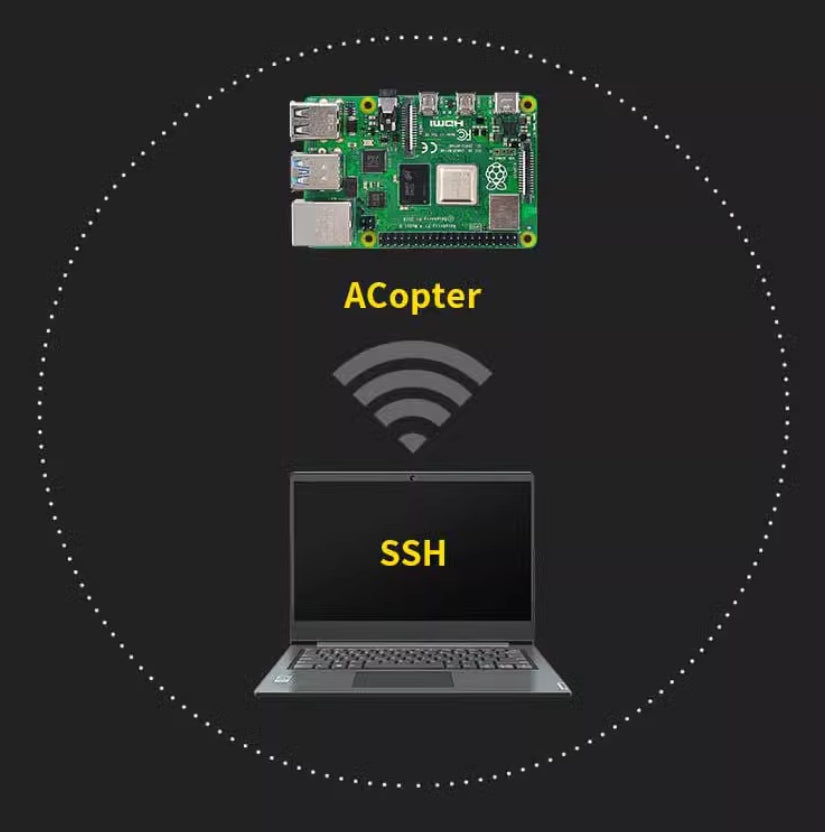
Системная точка доступа WiFi (Acopter)
Используя возможности WiFi Raspberry Pi 4B, создается самодельная точка доступа (Acopter). ПК может напрямую подключаться к точке доступа WiFi 4B, чтобы сформировать локальную сеть и использовать команды SSH для удаленного доступа к Raspberry Pi. В отличие от модели 3B+, которой для настройки сети требуется маршрутизатор, эта настройка намного проще и удобнее для новичков.
Визуальная обработка OpenCV
Добавлена монокулярная камера, позволяющая передавать изображения и выполнять постобработку. Видеопотоки можно захватывать через Raspberry Pi и обрабатывать с помощью таких инструментов, как OpenCV. Видеопотоки HD в реальном времени также можно передавать обратно на ПК для обработки или на мобильное устройство для просмотра.

Больше интерфейсов расширения
Raspberry Pi 4B предлагает широкий спектр интерфейсов расширения, включая два порта USB 3.0, два порта 4K micro HDMI, интерфейсы CSI и DSI, гигабитный Ethernet и блок питания Type-C, что обеспечивает исключительную универсальность для различных приложений.
Версия с одной камерой
Версия с одной камерой включает Raspberry Pi 4B и монокулярную камеру, что позволяет осуществлять связь через последовательный порт с контроллером полета. Она поддерживает такие задачи, как визуальная обработка, программирование на Python и связь. Эта версия подходит для пользователей с опытом использования Pixhawk, базовыми знаниями Ubuntu (Linux), OpenCV, Raspberry Pi и локальной сетевой связью.
В дополнение к основным функциям версия с одной камерой поддерживает передачу изображений и данных по WiFi и позволяет управлять дроном через Dronekit-python программирование.

Оптическое позиционирование потока
Управление зависанием в помещении с помощью Dronekit-python в условиях оптического позиционирования потока

Эта платформа для разработки дронов поддерживает РОС, программирование на Python, Распознавание изображений OpenCV, Передача данных на большие расстояния 4G, и Визуально управляемая посадка с использованием кода Aruco 2D, что делает его весьма универсальным и инновационным.

Пульт дистанционного управления FlySky i6
Оснащен приемником ia6b с предустановленной 10-канальной прошивкой, модулем телеметрии напряжения и дальностью дистанционного управления более 1000 м, что идеально подходит для начинающих пользователей для обучения и практики.

Пульт дистанционного управления Radiolink AT9S
Имеет 10 каналов с дальностью управления более 2000 м. Оснащен телеметрическим модулем, который предоставляет данные о напряжении батареи, количестве спутников GPS, высоте полета, координатах, режиме полета и многом другом.

Часто задаваемые вопросы
1. Могу ли я заниматься вторичной разработкой?Могу ли я программировать самостоятельно?
Ответ — да. Как уже упоминалось ранее, Ardupilot в настоящее время является наиболее широко используемой системой управления полетом с открытым исходным кодом, и на основе этой системы разработано множество отличных отечественных и международных моделей дронов.
Вторичное развитие в основном имеет два направления: развитие управления полетом и внешнее расширение.
- Разработка системы управления полетом
Мы используем Ardupilot, поэтому изучение разработки систем управления полетом с открытым исходным кодом в первую очередь подразумевает изучение проекта Ardupilot с открытым исходным кодом.
- Требуются сильные навыки программирования (исходный код написан на C++), а также знание высшей математики (дискретная математика, итерация, линеаризация), фильтрации Калмана и разработки встраиваемых систем.
- Необходима прочная теоретическая база. Это подготовит вас к работе над разработкой беспилотных систем и НИОКР по управлению полетом.
Если вы хотите сосредоточиться на разработке системы управления полетом, большую часть работы необходимо выполнить на компьютере:
- Настройка среды программирования, загрузка исходного кода системы управления полетом, изучение ее архитектуры и функциональных модулей и т. д.
- Ознакомившись с кодовой структурой, вы можете приступить к программированию на основе существующего кода.
Начните с базовой модели управления полетом и обратитесь к учебнику по управлению полетом Ardupilot, который мы предоставляем для получения инструкций.
- Внешнее развитие расширения
Внешнее расширение позволяет добавлять внешние устройства на основе ваших задач и сценариев через зарезервированные интерфейсы контроллера полета. Например:
- Добавьте оптический модуль потока для позиционирования и зависания в помещении.
- Добавьте лазерный радар для обхода препятствий.
- Используйте телеметрию для обеспечения автономного полета и планирования маршрута.
- Установите бортовой компьютер (например, Raspberry Pi) и используйте Dronekit-Python или ROS для программирования управления дроном.
Целью добавления бортового компьютера является решение более сложных задач, таких как:
- Использование камеры Raspberry Pi для визуального распознавания (требуется OpenCV, YOLO и т. д.).
- Объединение протоколов связи для управления полетом дрона.
- Передача полетных данных или видео высокой четкости по сетям.
Эти функции невозможно реализовать, полагаясь исключительно на контроллер полета.
Изучение внешнего расширения в основном сосредоточено на заявках, что также является направлением большинства конкурсов по всей стране.После обучения вы сможете изучить важнейшие области интеллектуальных дронов, такие как визуальное распознавание, интеграция ИИ с дронами и многое другое.
2. Каковы предпосылки для самостоятельного развития?
Изучение дронов — это постепенный процесс. Системы дронов являются междисциплинарными и интегративными, охватывающими широкий спектр областей знаний. Для изучения разработки дронов необходимы следующие основы:
- Базовые практические навыки, включая умение пользоваться паяльниками, различными отвертками и другими инструментами.
- Базовые знания электроники: такие понятия, как напряжение, ток, мощность, полярность и сигналы.
- Фундаментальные знания в области автоматического управления: ПИД-регулирование, обратная связь, цифровые сигналы, аналоговые сигналы и т. д.
- Базовые навыки работы с компьютером: драйверы, последовательные порты, скорости передачи данных, версии прошивки, версии программного обеспечения.
- Базовые знания о дронах Pixhawk.
- Базовые знания операционной системы Ubuntu.
- Знание языков программирования: например, C++ и Python.
Как сделать дрон на базе Respberry PI?
Related Collections