GPS-модуль Holybro DroneCAN M8N — процессор STM32G4, компас BMM150, поддержка 3GNSS протокола DroneCAN
GPS-модуль Holybro DroneCAN M8N — процессор STM32G4, компас BMM150, поддержка 3GNSS протокола DroneCAN
HolyBro
Не удалось загрузить сведения о доступности самовывоза
Описание
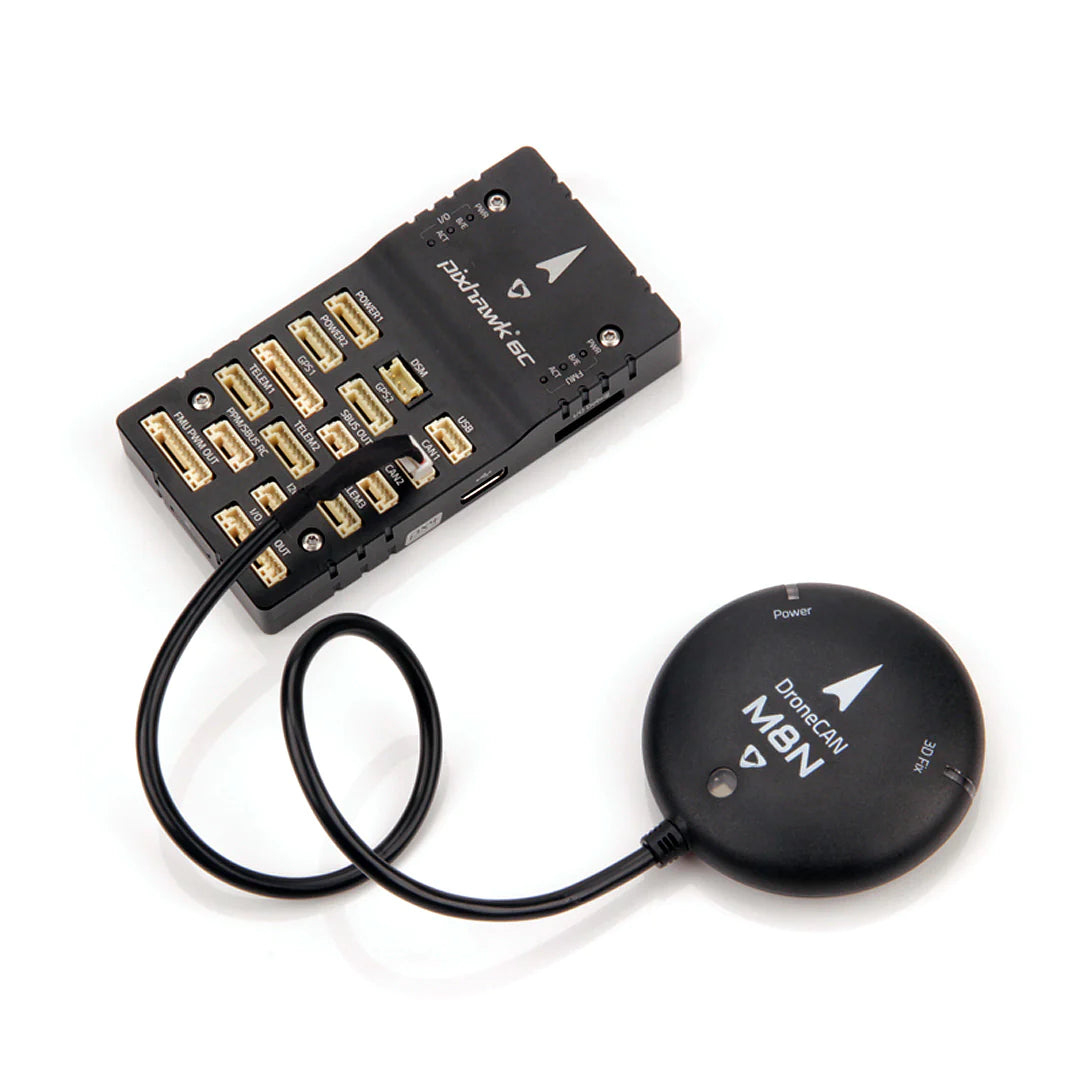
Holybro DroneCAN GPS имеет модуль UBLOX M8N или M9N, компас BMM150, трехцветный светодиодный индикатор. Он оснащен процессором STM32G4 и использует протокол DroneCAN для связи, что делает его более надежным и лучше справляется с электромагнитными помехами по сравнению с последовательным соединением. Он не занимает какой-либо последовательный порт полетного контроллера, и различные устройства CAN могут быть подключены к одной и той же шине CAN через разветвитель CAN.
Спецификация:
| DroneCAN M8N | |
| Приемник GNSS | Ublox NEO M8N |
| Количество одновременных GNSS | До 3 GNSS (GPS, Galileo, ГЛОНАСС, BeiDou) |
| Процессор | STM32G4 (170 МГц, 512 тыс. флэш-памяти) |
| Компас | БММ150 |
| Диапазон частот | GPS: L1C/A ГЛОНАСС: L10F Бэйдоу: B1I Галилео: E1B/C |
| Система дополнения GNSS | SBAS: WAAS, EGNOS, MSAS, QZSS |
| Обновление навигации | 5 Гц по умолчанию (10 Гц МАКС) |
| Точность | 2,5 м |
| Точность скорости | 0,05 м/с |
| Макс. количество спутников | 22+ |
| Протокол связи | DroneCAN @ 1 Мбит/с |
| Поддержка встроенного автопилота | PX4, Ардупилот |
| Тип порта | GHR-04V-S |
| Антенна | керамическая патч-антенна 25 x 25 x 4 мм |
| Энергопотребление | Менее 200 мА при 5 В |
| Напряжение | 4,7-5,2В |
| Рабочая температура | -40~80C |
| Размер | Диаметр: 54 мм Толщина: 14,5 мм |
| Вес | 36г |
| Длина кабеля | 26см |
| Другие примечания | - LNA MAX2659ELT+ ВЧ-усилитель - Перезаряжаемая емкость Фараха - Малошумящий стабилизатор 3,3 В |
Для получения другой технической информации перейдите на https://docs.holybro.com/
DroneCAN
DroneCAN — это основной протокол CAN, используемый проектами ArduPilot и PX4 для связи с периферийными устройствами CAN. Это открытый протокол с открытой связью, спецификациями и множеством открытых реализаций.
Разработка DroneCAN
Проект DroneCAN имеет активное сообщество разработчиков.
- обсуждение разногласий на https://dronecan.org/discord
- разработка на github https://github.com/DroneCAN
Related Collections