





Контроллер полета Holybro Pix32 v6 на базе модуля STM32H743 FC Стандартный набор Мини-набор с GPS M8N/M9N/M10
Контроллер полета Holybro Pix32 v6 на базе модуля STM32H743 FC Стандартный набор Мини-набор с GPS M8N/M9N/M10
HolyBro
Не удалось загрузить сведения о доступности самовывоза
Pix32 v6 — это последнее обновление контроллеров полета pix32 v5. Это вариант Pixhawk 6C. Он состоит из отдельного контроллера полета и несущей платы, которые соединены 100-контактным разъемом. Он предназначен для тех пилотов, которым нужна мощная, гибкая и настраиваемая система управления полетом.
Внутри Pix32 v6 вы можете найти STM32H743 на базе STMicroelectronics® в сочетании с сенсорной технологией от Bosch® и InvenSense®, что обеспечивает гибкость и надежность управления любым автономным транспортным средством, подходящим как для академических, так и для коммерческих приложений.
Микроконтроллер H7 Pix32 v6 содержит ядро Arm® Cortex®-M7, работающее на частоте до 480 МГц, имеет флэш-память объемом 2 МБ и ОЗУ 1 МБ. Благодаря обновленной вычислительной мощности разработчики могут работать более продуктивно и эффективно, позволяя использовать сложные алгоритмы и модели. Он включает в себя высокопроизводительные, малошумящие IMU, разработанные с учетом экономической эффективности при наличии резервирования IMU. Система виброизоляции для фильтрации высокочастотной вибрации и снижения шума для обеспечения точных показаний, что позволяет транспортным средствам достигать лучших общих летных характеристик.
Этот контроллер полета идеально подходит для людей, которые ищут доступный и модульный полет. контроллер, который может использовать настроенную основную плату. Мы опубликовали схемы базовой платы pix32 v6. Вы можете либо сделать специальную несущую плату самостоятельно, либо просто позволить нам помочь вам с этим. Используя настраиваемую базовую плату, вы можете быть уверены, что физический размер, распиновка и требования к распределению питания идеально соответствуют вашему автомобилю, гарантируя, что у вас есть все необходимые соединения и нет затрат и большого количества разъемов, которых у вас нет.
Ключевые моменты проектирования:
- Высокопроизводительный процессор STM32H743 с большей вычислительной мощностью и оперативной памятью
- Новый экономичный дизайн с низкопрофильным форм-фактором
- Новая интегрированная система виброизоляции для фильтрации высокочастотной вибрации и снижения шума для обеспечения точных показаний
- Температура IMU контролируется встроенными нагревательными резисторами, что обеспечивает оптимальную рабочую температуру IMU
Примечание:
- Сравнительная таблица модулей питания
- M10 GPS Требуется PX4 1.14, требуется ArduPilot 4.3 или более поздняя версия. (По состоянию на 7 сентября 2023 г. для PX4 выпущена версия 1.14 RC1 (кандидат на выпуск). Пожалуйста, проверьте эту ссылку для получения последней информации о выпуске. Более подробную информацию о том, как прошить версию RC, можно найти здесь.)
С легкостью спроектируйте свою собственную базовую плату, используя предоставленный файл эталонного дизайна.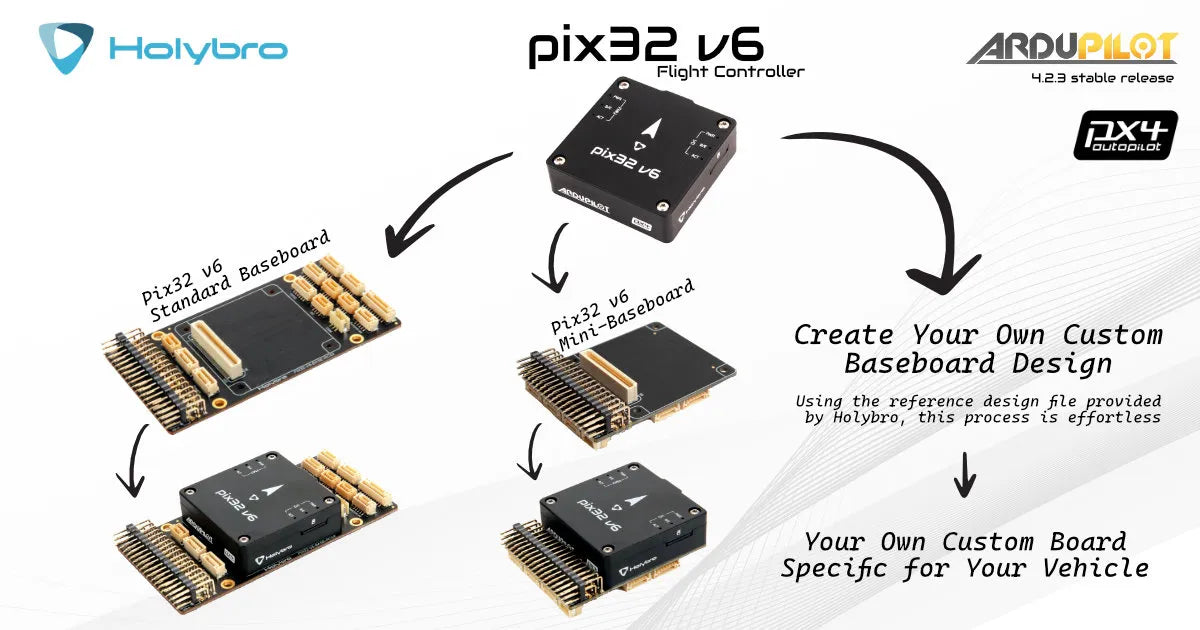
SKU20190/20192 Включает:
- Модуль контроллера полета Pix32 v6
- Стандартный плинтус/мини-плинтус
- Модуль питания PM02 V3 12S
- Стандартный набор кабелей
SKU20191/SKU20193 Включает:
- Модуль контроллера полета Pix32 v6
- Стандартный плинтус/Мини-плинтус
- Модуль питания PM02 V3 12S
- Набор мини-кабелей
- M8N GPS / M9N GPS / M10 GPS
Примечание. Стандартный набор Pix32v6 будет поставляться с базовой платой Pix32v5 до дальнейшего уведомления. Дополнительную информацию о базовой плате можно найти здесь.












