Контроллер полета автопилота Holybro Pixhawk 4
Контроллер полета автопилота Holybro Pixhawk 4
HolyBro
Не удалось загрузить сведения о доступности самовывоза
Pixhawk® 4 оснащен передовой процессорной технологией от STMicroelectronics®, сенсорной технологией от Bosch®, InvenSense® и операционной системой реального времени NuttX, что обеспечивает невероятную производительность, гибкость и надежность для управления любым автономным транспортным средством.
Микроконтроллер Pixhawk 4 имеет 2 МБ флэш-памяти и 512 КБ ОЗУ. Благодаря увеличенной мощности и ресурсам ОЗУ разработчики могут быть более продуктивными и эффективными в своей работе по разработке. На автопилоте можно реализовать более сложные алгоритмы и модели.
Высокопроизводительные и малошумящие IMU на борту предназначены для приложений стабилизации. Готовые к данным сигналы от всех датчиков направляются на отдельные контакты прерывания и захвата таймера на автопилоте, что позволяет точно маркировать данные датчиков по времени. Недавно разработанная виброизоляция обеспечивает более точные показания, позволяя транспортным средствам достигать лучших общих летных характеристик.
Две внешние шины SPI и шесть связанных линий выбора чипа позволяют добавлять дополнительные датчики и полезную нагрузку с интерфейсом SPI. Всего имеется четыре шины I2C, две из которых предназначены для внешнего использования, а две сгруппированы с последовательными портами для модулей GPS/компаса.
Примечание:
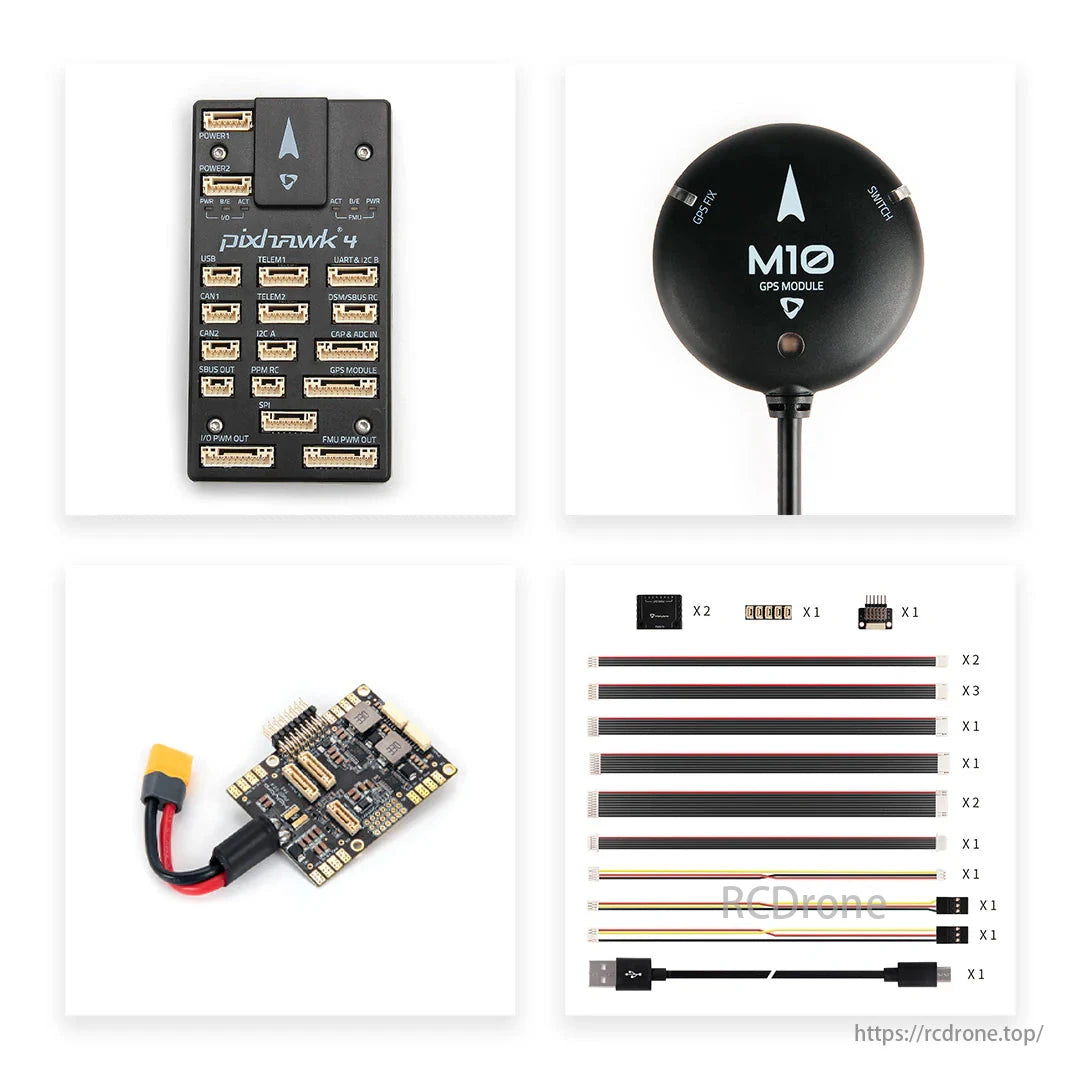
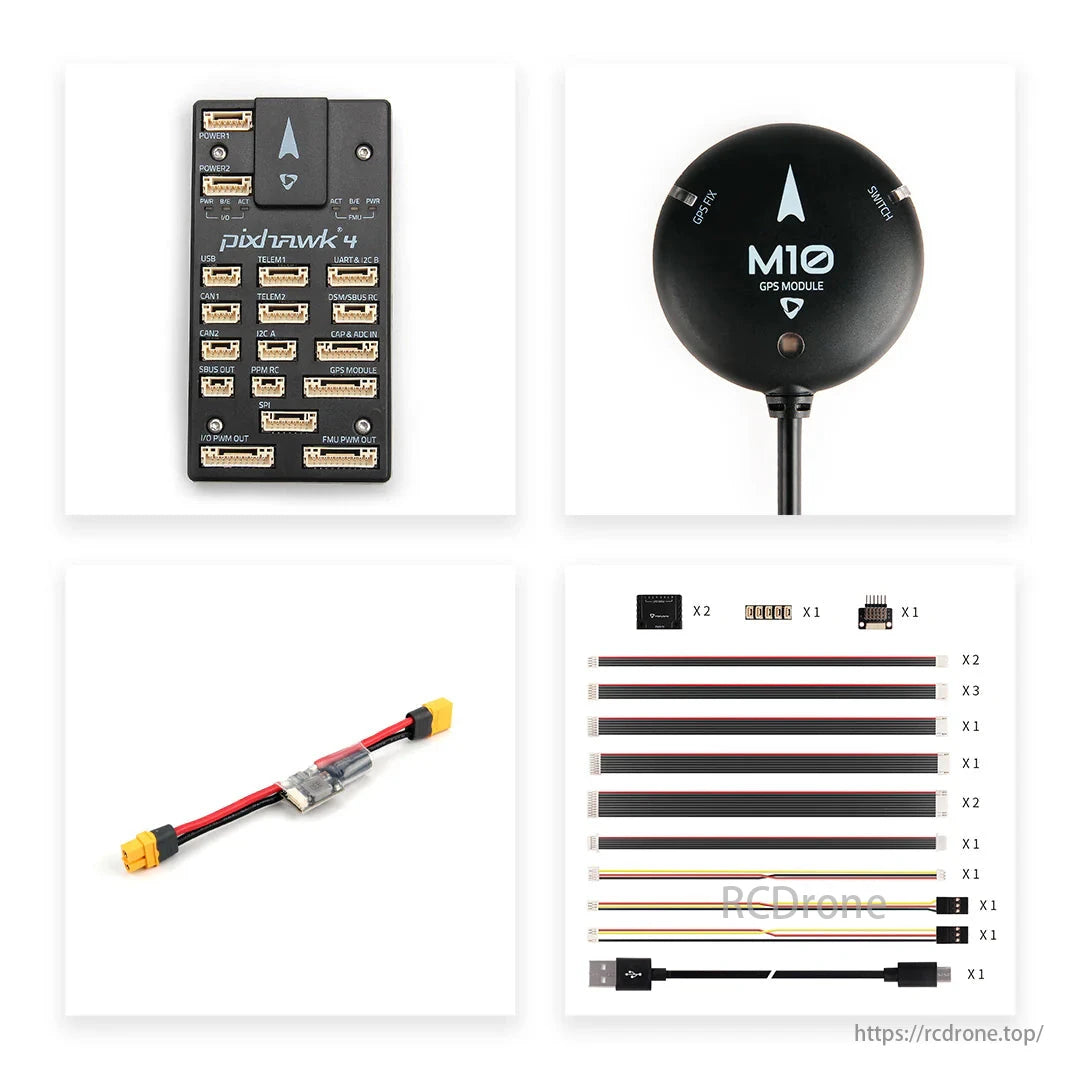
- M10 GPS требуется PX4 1.14 и ArduPilot 4.3 или новее.
- Сравнительная таблица модулей питания
Технические характеристики
- Основной процессор FMU
- STM32F765 - 32-битный Arm ® Cortex® -M7, 216 МГц, 2 МБ памяти, 512 КБ ОЗУ
- STM32F765 - 32-битный Arm ® Cortex® -M7, 216 МГц, 2 МБ памяти, 512 КБ ОЗУ
- Процессор ввода-вывода
- STM32F103 - 32-битный Arm® Cortex®-M3, 72 МГц, 64 КБ SRAM (текущая версия)
- STM32F100 - 32-битный Arm ® Cortex® -M3, 24 МГц, 8 КБ SRAM (снято с производства)
- Бортовые датчики
- Акселератор/гироскоп: ICM-20689
- Акселератор/гироскоп: BMI055/ICM-20602
- Маг: IST8310
- Барометр: MS5611
- Акселератор/гироскоп: ICM-20689
Электрические данные
- Выход модуля питания: 4,9~5,5 В
- Максимальное входное напряжение: 6 В
- Максимальный ток обнаружения: 120 А
- Входное напряжение USB: 4,75~5,25 В
- Вход сервопривода: 0~36 В
- Рабочая температура: -25-85°C
Механические данные
- Размеры: 44x84x12мм
- Вес (пластиковый корпус): 33.3г
- Вес (алюминиевый корпус): 49 г
Загрузки:
Артикул 11032/11035 Включает в себя:
- Контроллер полета Pixhawk 4 (пластик или алюминий)
- Комплект кабелей
Артикул 20045/20046/20114/20115 Включает в себя:
- Контроллер полета Pixhawk 4(Пластик или Алюминий)
- Модуль питания: PM02 V3 12S/PM07 14S
- Комплект кабелей
Артикул 20139/20140/20141/20142/20269/20270/20271/20272 Включает в себя:
- Контроллер полета Pixhawk 4
- Модуль питания: PM02 V3 12S/ПМ07 14С
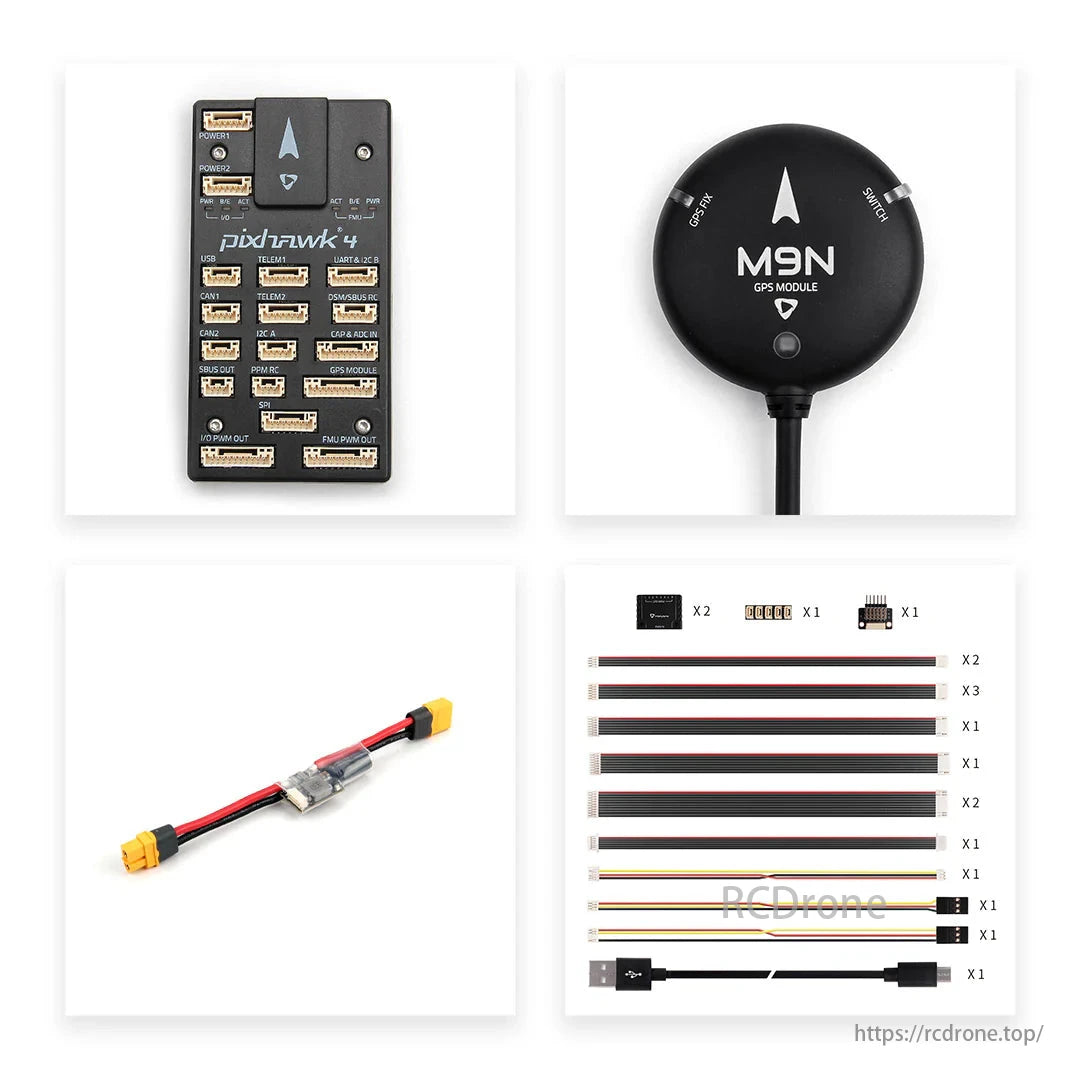
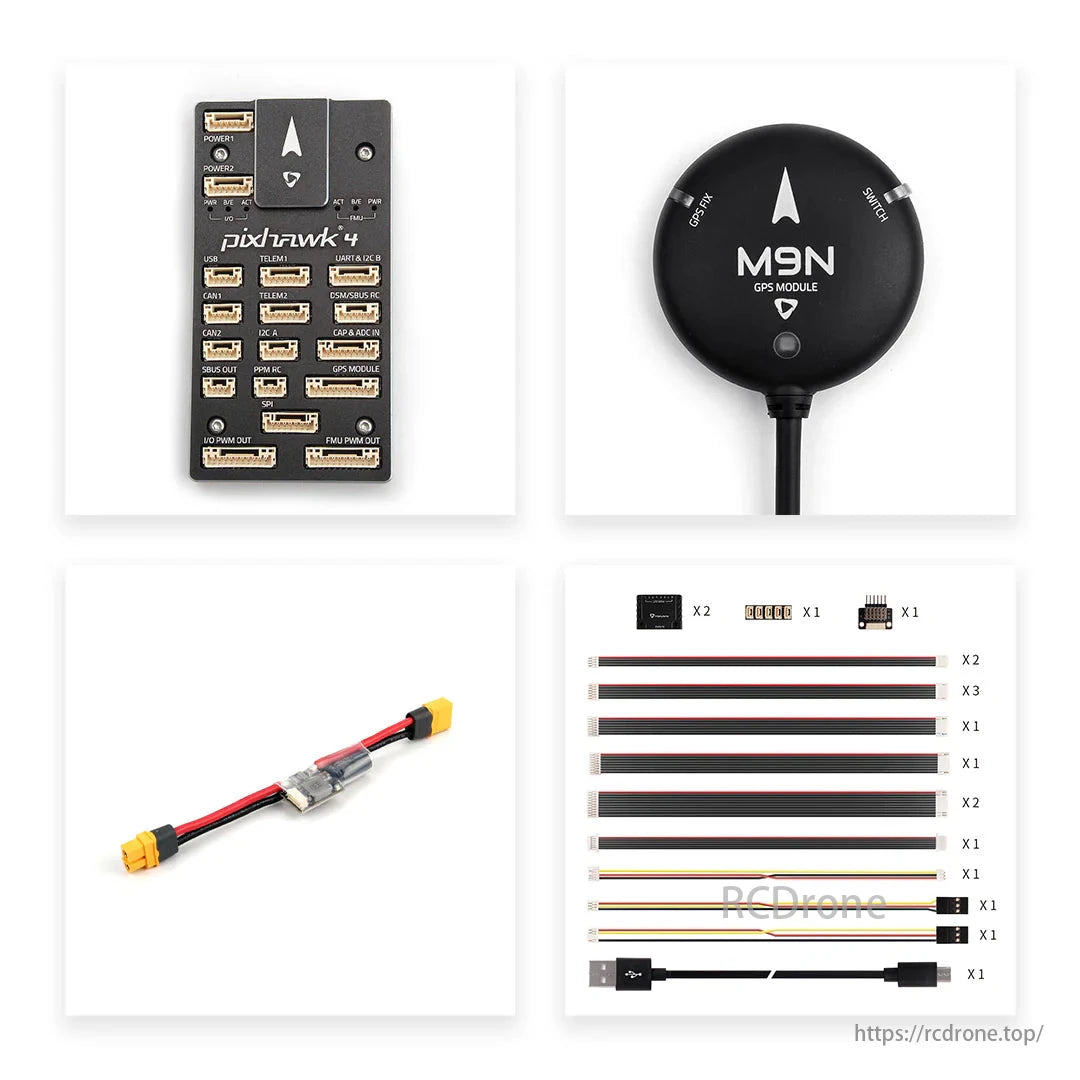
- GPS: М9Н/М10
- Комплект кабелей

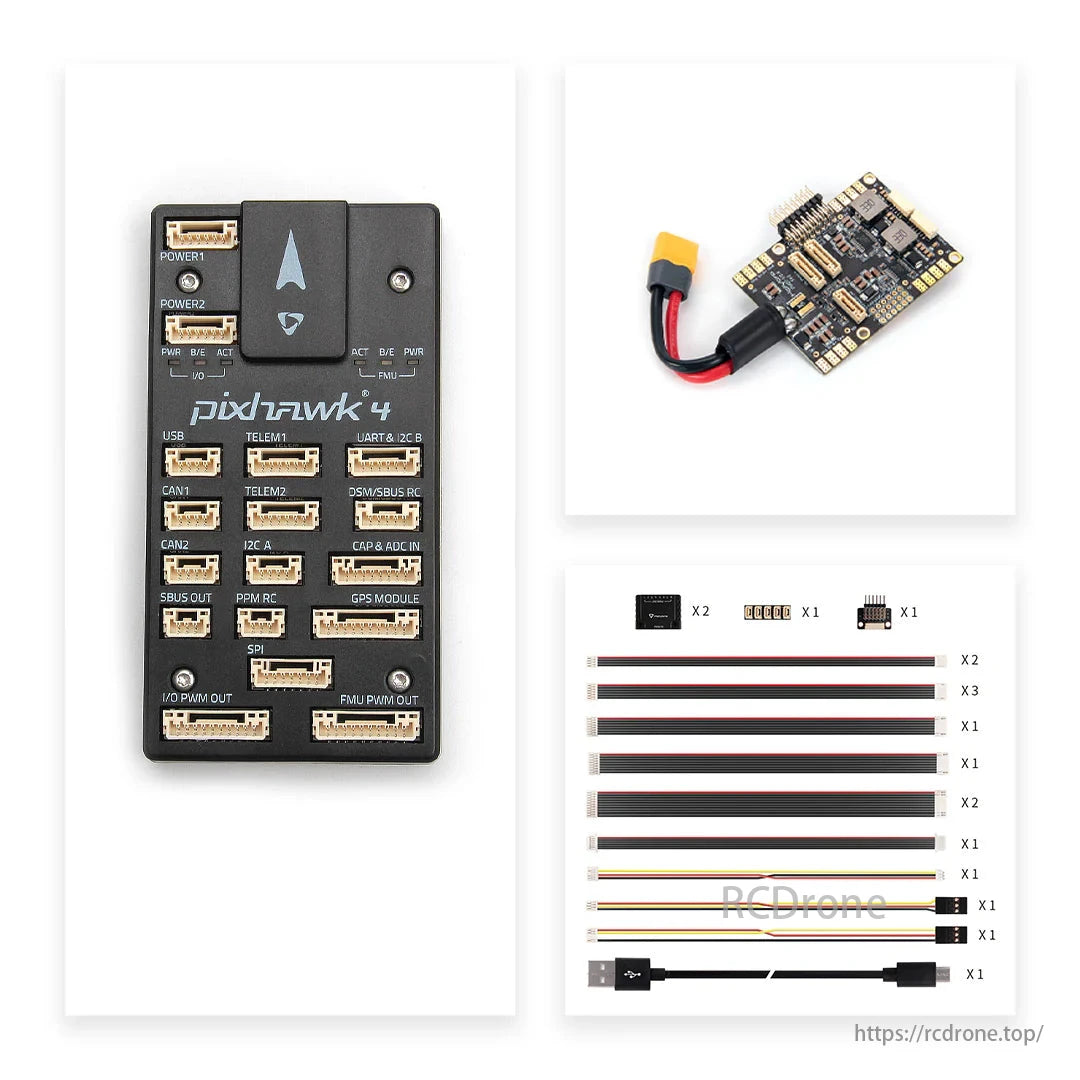
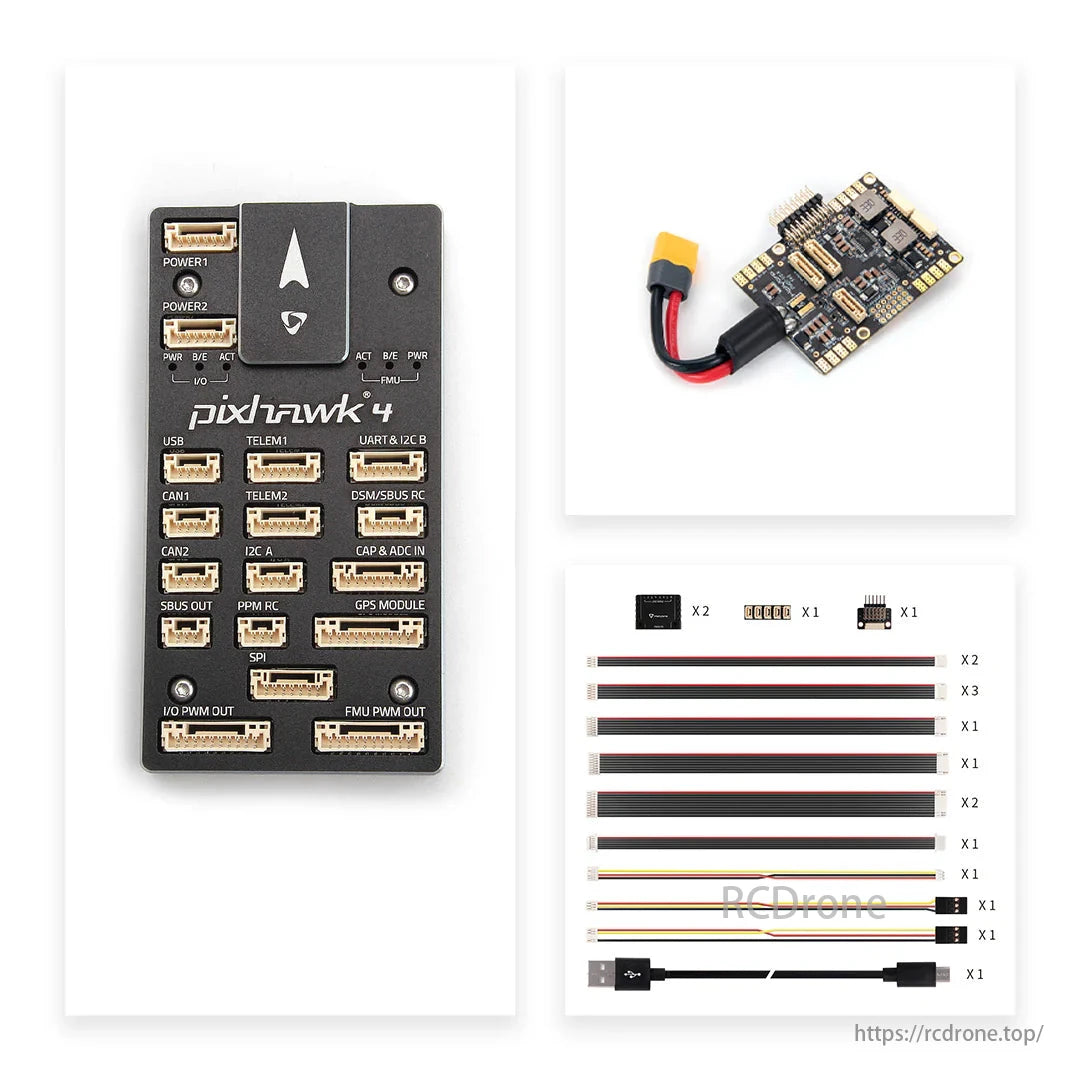
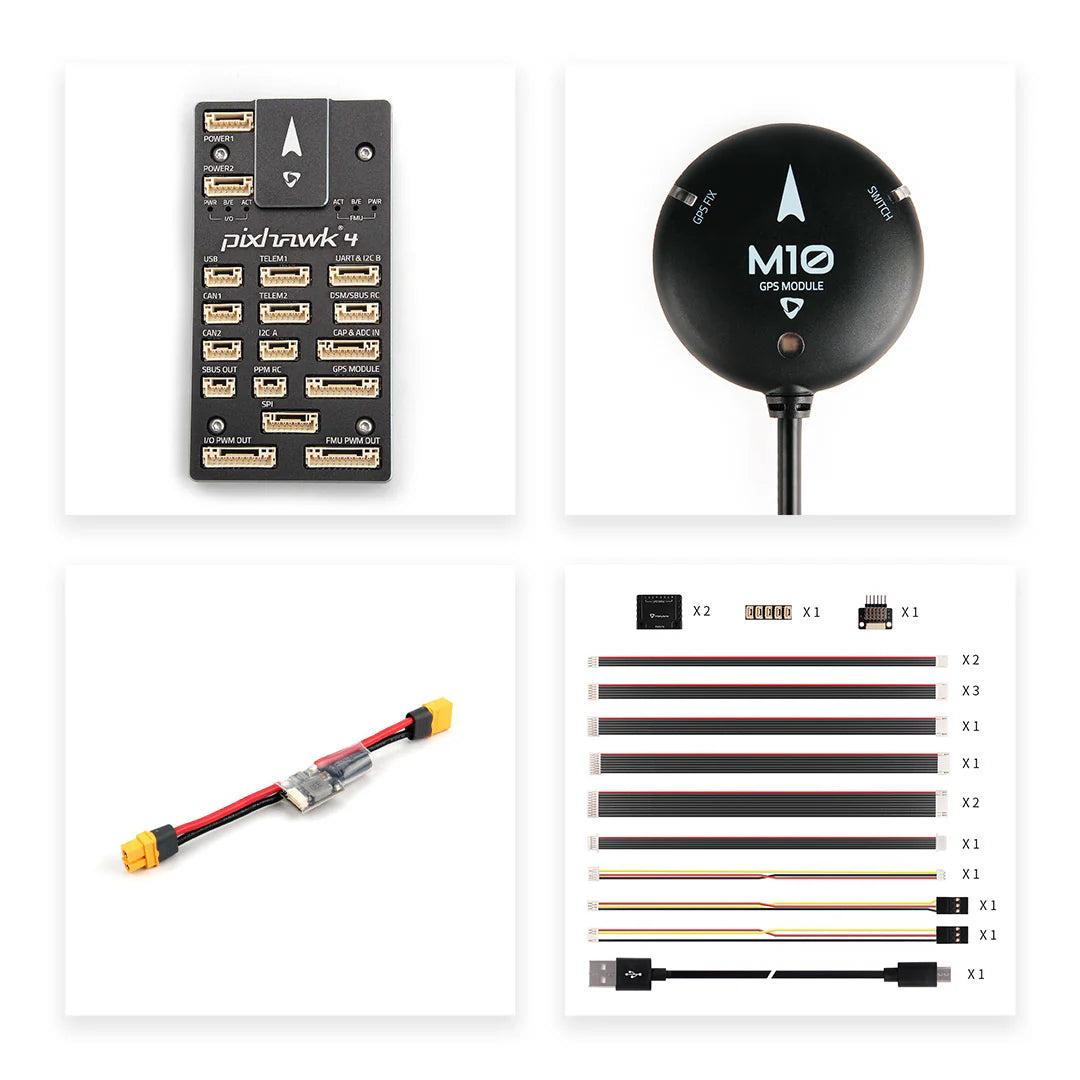
Контроллер полета Pixhawk 4 с различными портами, включая USB, CAN, TELEM, UART, I2C, SBUS OUT, PPM RC, SPI и GPS MODULE.

Контроллер полета Pixhawk, работающий на базе системы автопилота PX4.

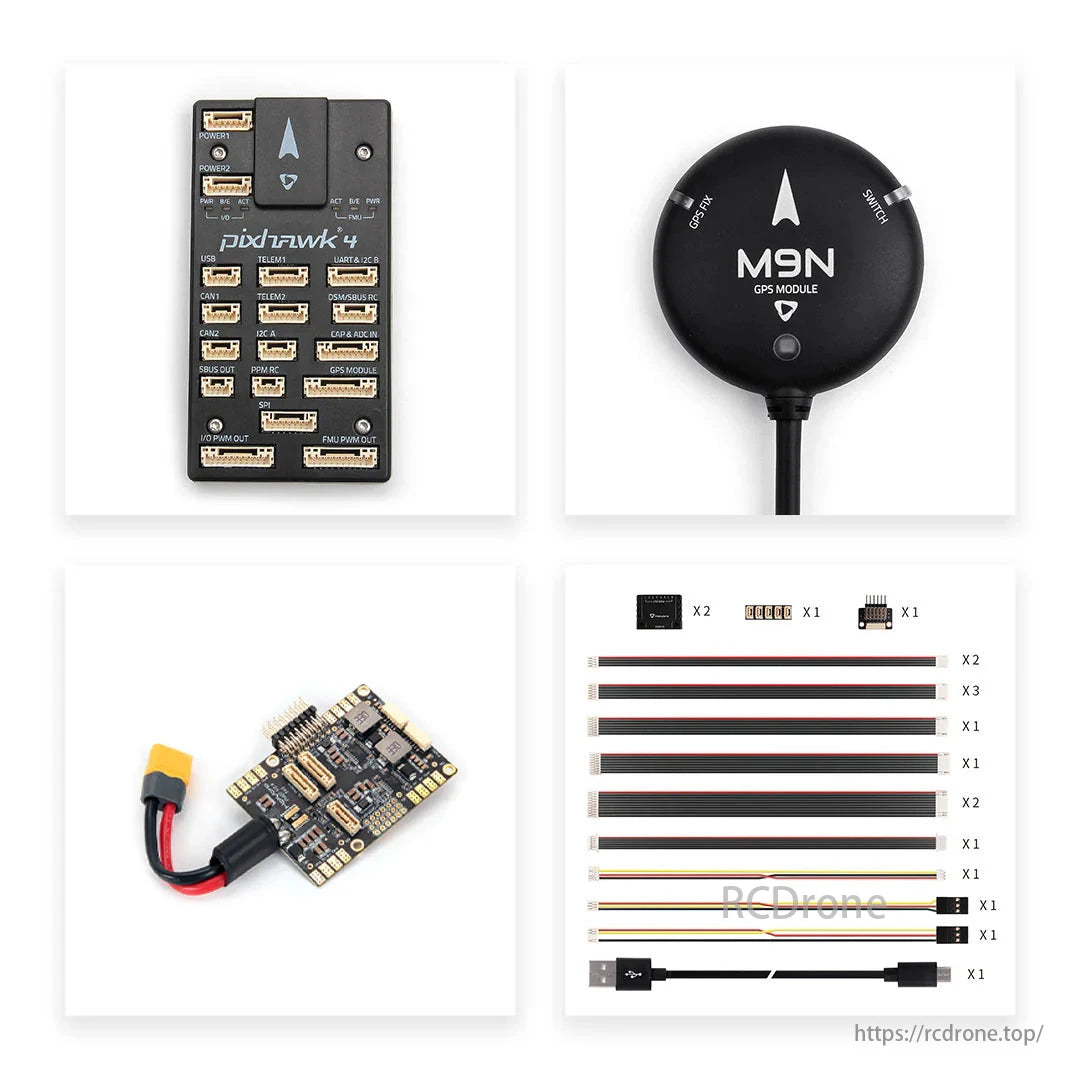
Контроллер полета Pixhawk 4, модуль GPS M9N, модуль питания с разъемом XT60 и различные кабели для сборки радиоуправляемого дрона.

Контроллер полета Pixhawk 4 с различными портами, включая USB, CAN и модуль GPS. Включает модуль питания и несколько кабелей для подключений.

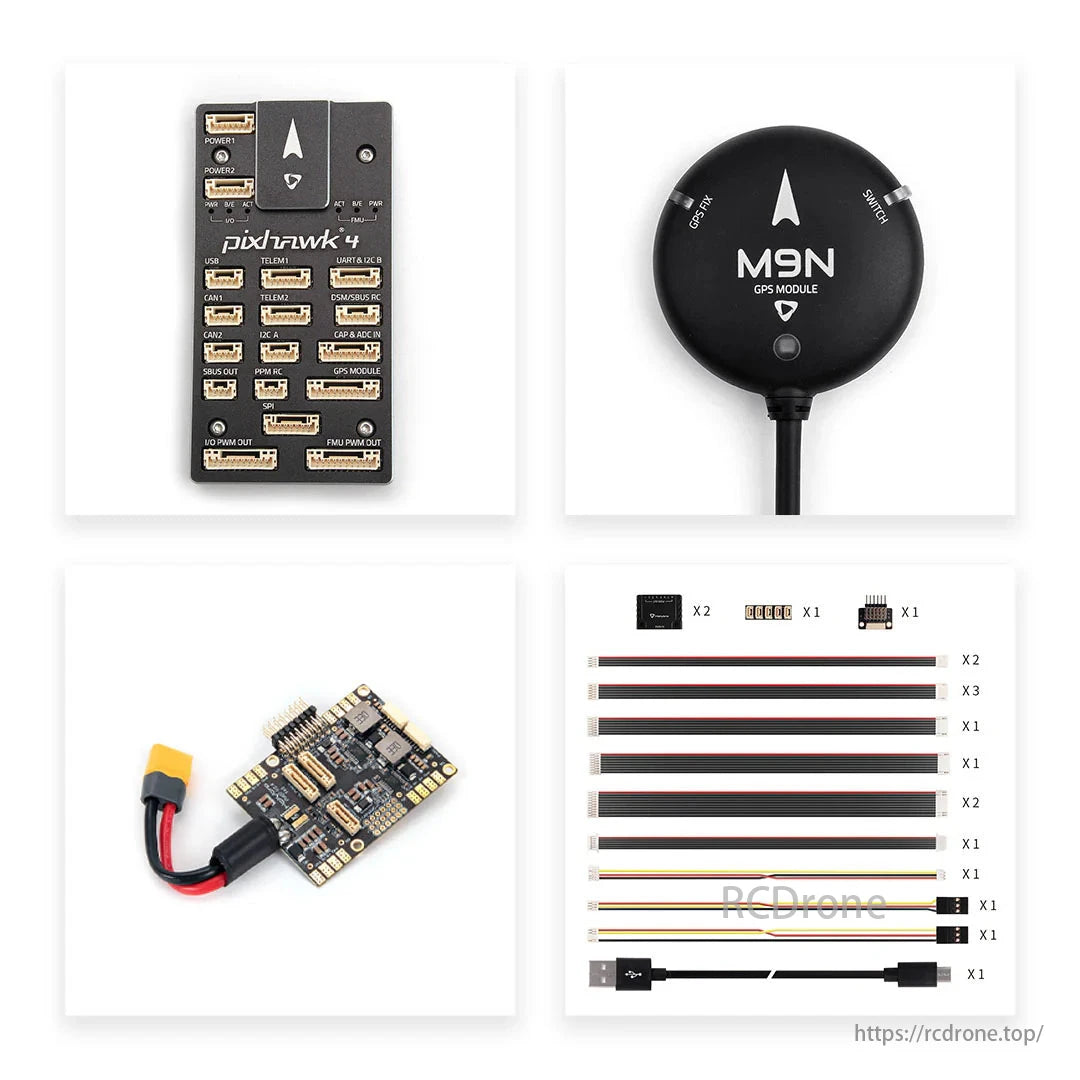
Контроллер полета Pixhawk 4, модуль GPS M9N, модуль питания с разъемом XT60 и различные кабели для подключения.