Контроллер полета для автопилота Holybro Pixhawk 5X
Контроллер полета для автопилота Holybro Pixhawk 5X
HolyBro
Не удалось загрузить сведения о доступности самовывоза
Pixhawk® 5X — это последнее обновление успешного семейства Пиксхок® контроллеры полета, основанные на открытом стандарте Pixhawk® FMUv5X и стандарте шины автопилота Pixhawk®. Он оснащен новейшей предустановленной системой PX4 Autopilot® с тройным резервированием, контролем температуры и изолированным доменом датчиков, что обеспечивает невероятную производительность и надежность.
Внутри Pixhawk® 5X вы найдете процессор STM32F7 на базе STMicroelectronics® в сочетании с сенсорной технологией от Bosch®, InvenSense®, что обеспечивает гибкость и надежность управления любым автономным транспортным средством, подходящим как для академических, так и для коммерческих приложений. Микроконтроллер F7 Pixhawk® 5X имеет 2 МБ флэш-памяти и 512 КБ ОЗУ. PX4 Autopilot использует преимущества увеличенной мощности и ОЗУ. Благодаря обновленной вычислительной мощности разработчики могут быть более продуктивными и эффективными в своей работе по разработке, что позволяет использовать сложные алгоритмы и модели.
Открытый стандарт FMUv5X включает высокопроизводительные малошумящие IMU на борту, разработанные для лучшей стабилизации. Тройной избыточный IMU и двойной избыточный барометр на отдельных шинах. Когда автопилот PX4 обнаруживает отказ датчика, система плавно переключается на другой, чтобы сохранить надежность управления полетом.
Независимый LDO питает каждый набор датчиков с независимым управлением питанием. Новая конструкция виброизоляции для фильтрации высокочастотной вибрации и снижения шума для обеспечения точных показаний, что позволяет транспортным средствам достигать лучших общих летных характеристик. Внешняя шина датчиков (SPI5) имеет две линии выбора чипа и сигналы готовности данных для дополнительных датчиков и полезной нагрузки с интерфейсом SPI, а также с интегрированным Microchip Ethernet PHY (LAN8742AI-CZ-TR), теперь поддерживается высокоскоростная связь с компьютерами миссии через Ethernet. Два интеллектуальных порта мониторинга батареи (SMBus), поддержка модуля питания INA226 SMBus.
Pixhawk® 5X идеально подходит для разработчиков в корпоративных исследовательских лабораториях, стартапах, академических кругах (исследователи, профессора, студенты) и коммерческих приложениях. Pixhawk 5X совместим с PX4 Автопилот & Прошивка Ardupilot.
Примечание:
- Pixhawk 5X требует протокол I2C для передачи данных о напряжении и токе от модуля питания, например ПМ02Д, аналоговый модуль питания (PM02, PM06, PM07) несовместим с Pixhawk 5X. Сравнительная таблица модулей питания
- По умолчанию поставляется с прошивкой PX4. Пользователь также может использовать прошивку Ardupilot, перепрошив ее через Mission Planner или QGroundControl.
Ключевые моменты дизайна
- Модульный контроллер полета: отдельные IMU, FMU и базовая система, соединенные 100-контактным и 50-контактным разъемом Pixhawk® Autopilot Bus, разработанный для гибких и настраиваемых систем
- Резервирование: 3 датчика IMU и 2 датчика барометра на отдельных шинах, что обеспечивает параллельную и непрерывную работу даже в случае отказа оборудования.
- Домены с тройным резервированием: полностью изолированные сенсорные домены с отдельными шинами и отдельным управлением питанием
- Система виброизоляции для фильтрации высокочастотной вибрации и снижения шума для обеспечения точности показаний
- Интерфейс Ethernet для высокоскоростной интеграции с компьютером миссии
- Автоматическая калибровка датчика, исключающая изменение сигналов и температуры
- Температура IMU контролируется встроенными нагревательными резисторами, что обеспечивает оптимальную рабочую температуру IMU.
Технические характеристики
- Процессор FMU: STM32F765
- 32-битный Arm® Cortex®-M7, 216 МГц, 2 МБ памяти, 512 КБ ОЗУ
- Процессор ввода-вывода: STM32F100
- 32-битный Arm® Cortex®-M3, 24 МГц, 8 КБ SRAM
- Бортовые датчики
- Акселератор/гироскоп: ICM-20649 (жесткий монтаж)
- Акселератор/гироскоп: ICM-42688P (мягкое крепление)
- Акселератор/гироскоп: ICM-20602 или BMI088 (Мягкий монтаж)
- Маг: BMM150
- Барометр: 2x BMP388
Электрические данные
- Номинальные напряжения:
- Максимальное входное напряжение: 6 В
- Входное напряжение USB: 4,75~5,25 В
- Вход сервопривода: 0~36 В
Интерфейсы
- 16- ШИМ-сервовыходы
- Вход R/C для Spektrum/DSM
- Выделенный вход R/C для входа PPM и S.Bus
- Выделенный аналоговый/ШИМ вход RSSI и S.Выход шины
- 4 последовательных порта общего назначения
- 3 с полным контролем потока
- 1 с отдельным ограничением тока 1А
- 1 с I2C и дополнительной линией GPIO для внешнего считывателя NFC
- 2 порта GPS
- 1 полноценный порт GPS и аварийного выключателя
- 1 базовый порт GPS
- 1 порт I2C
- 1 порт Ethernet
- Приложения без трансформатора
- 100 Мбит/с
- 1 шина SPI
- 2 линии выбора чипа
- 2 линии с готовыми данными
- 1 линия SPI SYNC
- 1 линия сброса SPI
- 2 CAN-шины для периферийного CAN-устройства
- Шина CAN имеет индивидуальные бесшумные элементы управления или управление ESC RX-MUX
- 2 порта ввода питания с SMBus
- 1 порт AD и ввода-вывода
- 2 дополнительных аналоговых входа
- 1 вход ШИМ/захвата
- 2 выделенные линии отладки и GPIO
Механические данные
- Размеры
- Модуль контроллера полета: 38,8 x 31,8 x 14,6 мм
- Мини-плинтуса: 43,4 х 72,8 х 14,2 мм
- Стандартная базовая плата v1: 52,4 x 103,4 x 16,7 мм
- Стандартная базовая плата v2A: 40,2 x 92,3 x 18,4 мм
- Стандартная базовая плата v2B: 40,2 x 98,3 x 16,9 мм
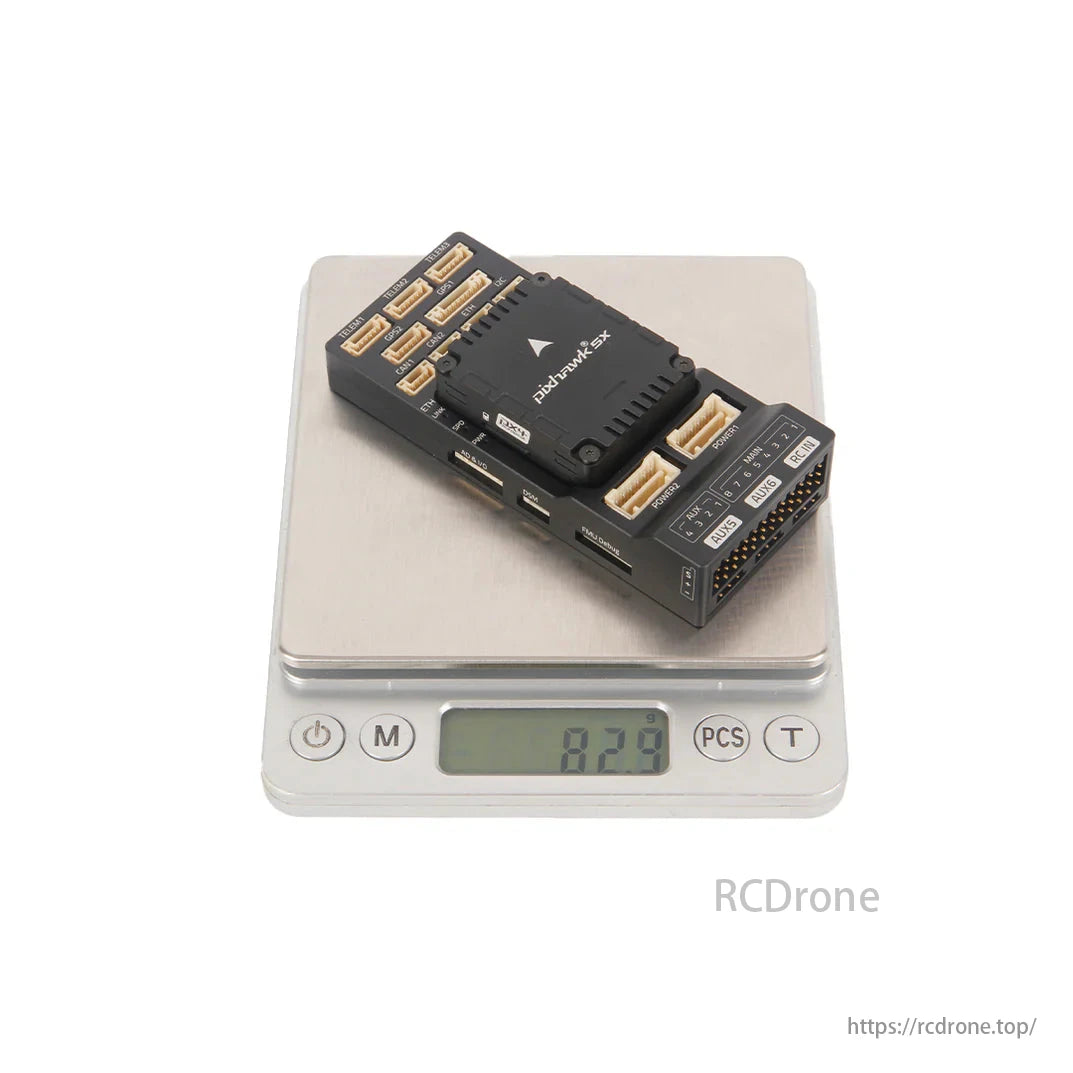
- Масса
- Модуль управления полетом: 23 г
- Мини-плинтус: 26.8г
- Стандартный плинтус v1: 51 г
- Стандартная базовая плата v2A: 58 г
- Стандартная базовая плата v2B: 58 г
Артикул 11045 включает в себя:
- Модуль контроллера полета Pixhawk 5X
Артикул 20307/Артикул 20320/Артикул20310 включает в себя:
- Модуль контроллера полета Pixhawk 6X
- Стандартная плинтусная плата v2A/v2B или мини-плинтусная плата
- Модуль питания высокого напряжения PM02D
- Комплект кабелей
- Модуль контроллера полета Pixhawk 6X
- Стандартная плинтусная плата v2A/v2B или мини-плинтусная плата
- Модуль питания высокого напряжения PM02D
- Комплект кабелей
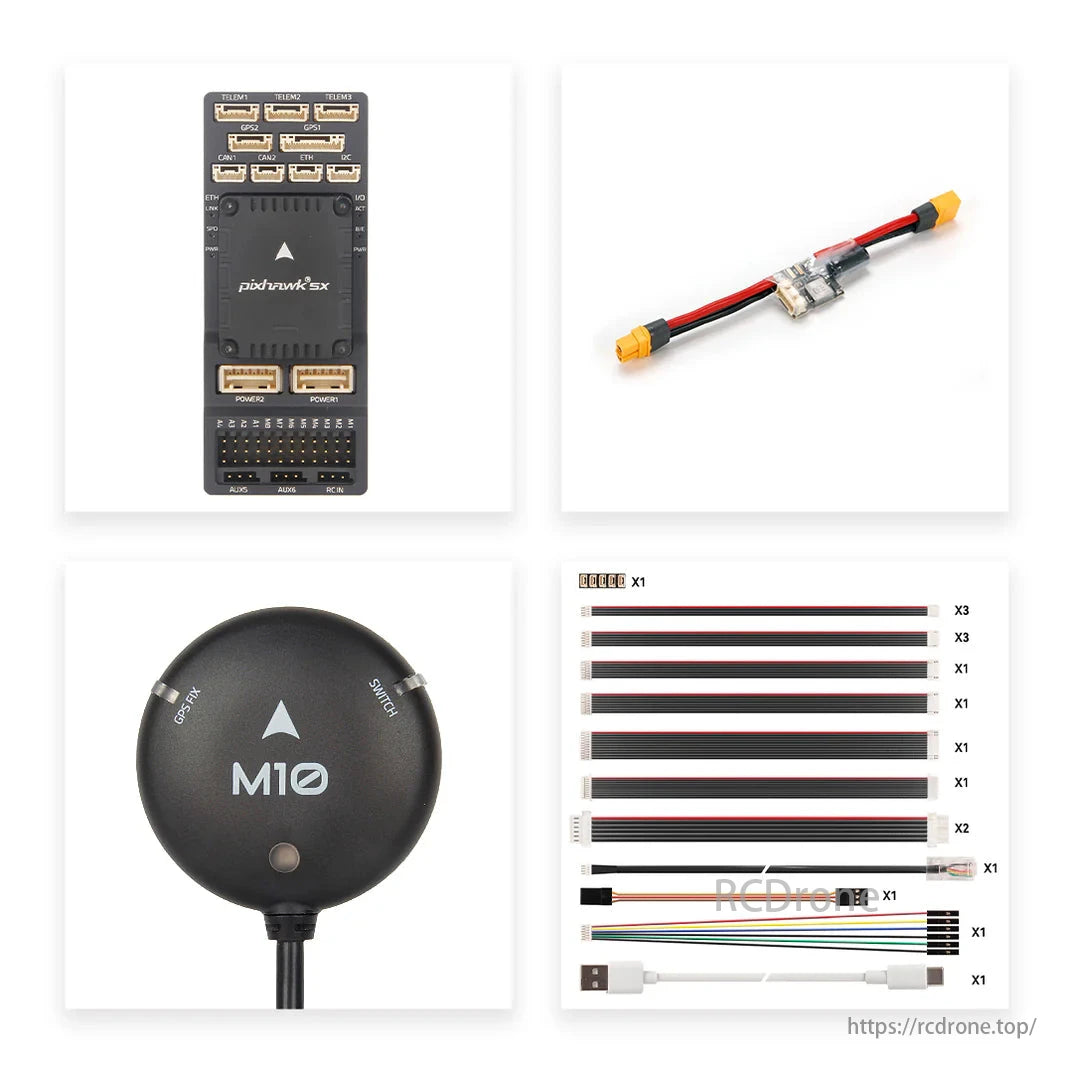
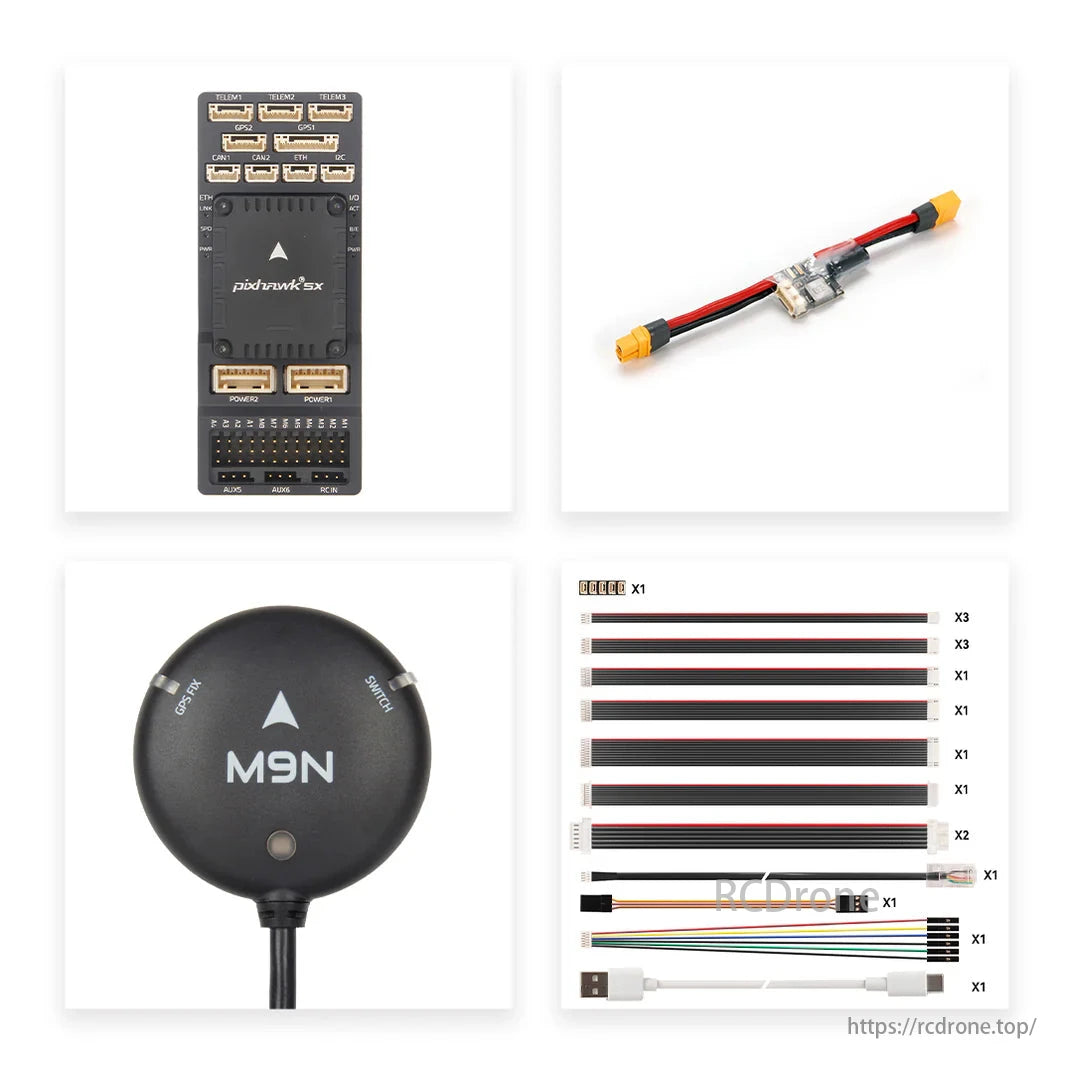
- М9Н/М10 GPS
Pixhawk mini, Pixhawk Baseboard v1 и два варианта Pixhawk Baseboard v2 (v2A и v2B) показаны с размерами. Mini — 43,4 x 72,8 мм, v1 — 52 x 101,90 мм, v2A — 40,2 x 92,3 мм, а v2B — 40,2 x 98,3 мм.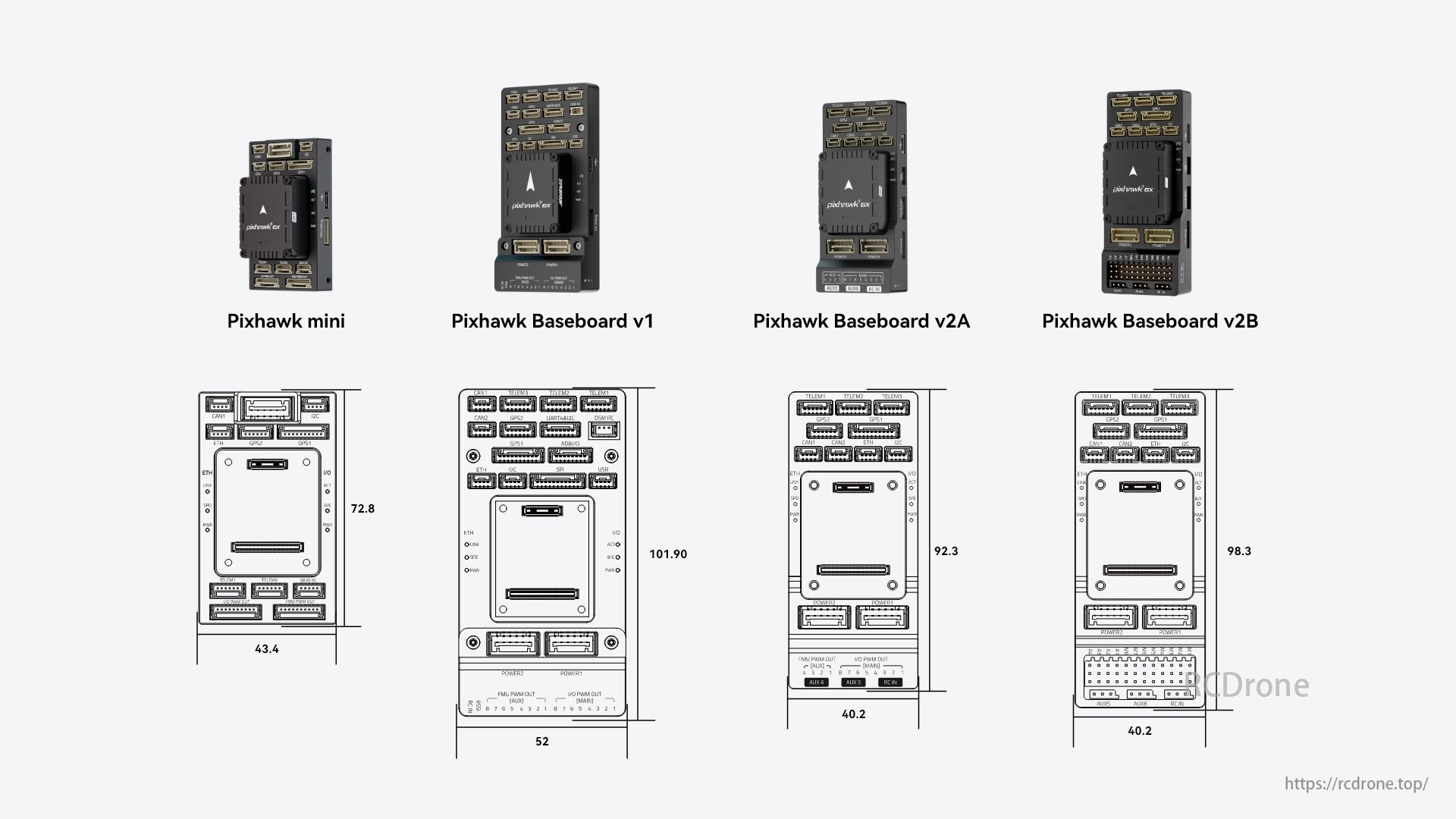
Руководство по образцам электропроводки

Схема Holybro Pixhawk 5X включает в себя основной и дополнительный GPS, порты UART4 и I2C, CAN1 и 2, приемник DSM RC, телеметрическое радио, HD FPV IP-камеру, аккумулятор, модуль питания, регуляторы скорости и плату распределения питания.
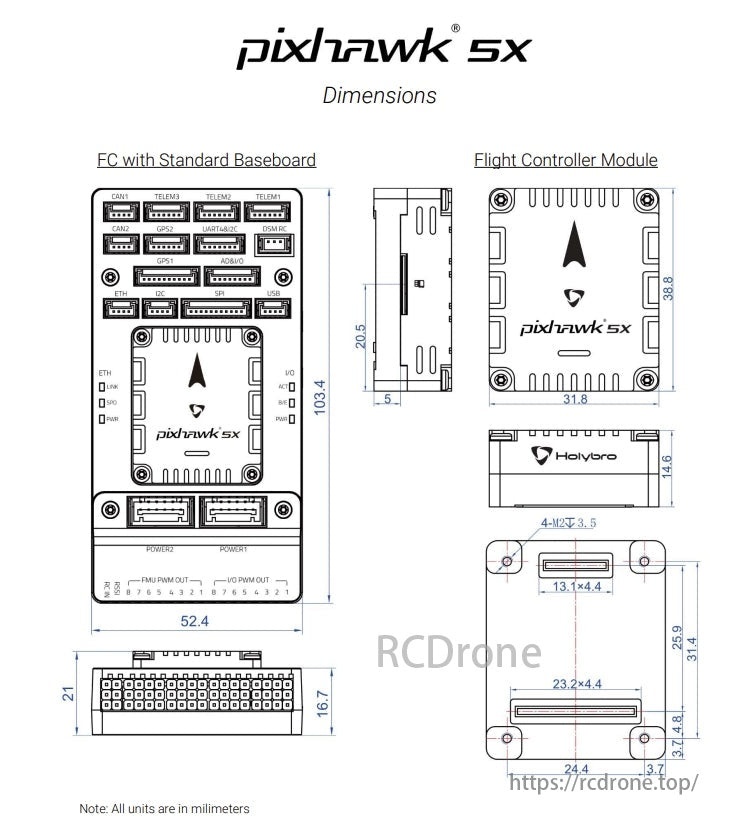
Размеры Pixhawk SX включают модуль контроллера полета и FC со стандартной базовой платой. Размеры модуля составляют 31,8 x 38,8 мм, а базовой платы — 103,4 x 52,4 мм. Все единицы указаны в миллиметрах.

Стандартные размеры базовой платы: 103,4 x 58 x 10,7 мм, с различными портами и разъемами, включая USB, Ethernet и входы питания.


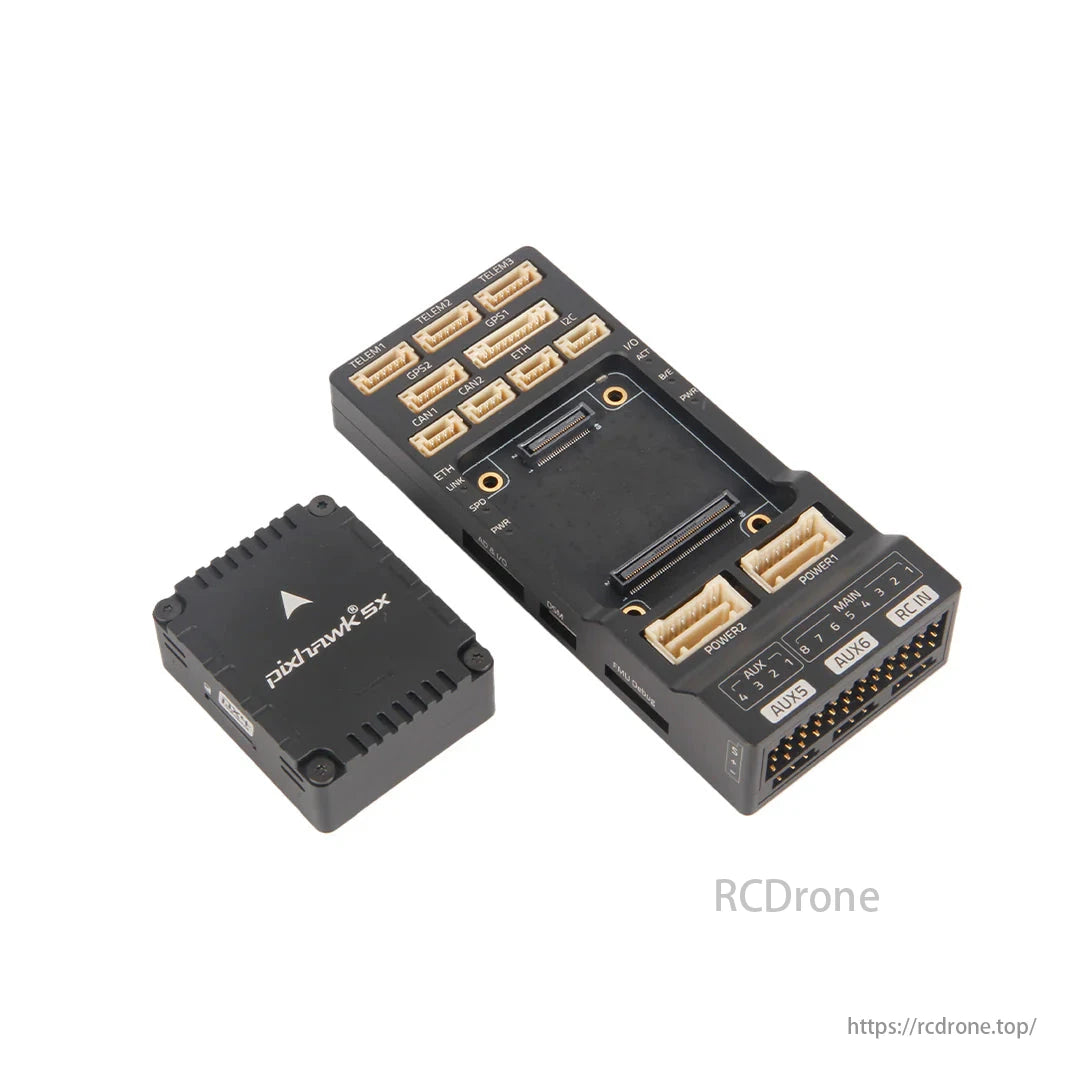
Контроллер полета Pixhawk 5X с портами TELEM1-3, GPS1-2, CAN1-2, ETH, I2C, POWER1-2, AUX5-6 и RC IN.
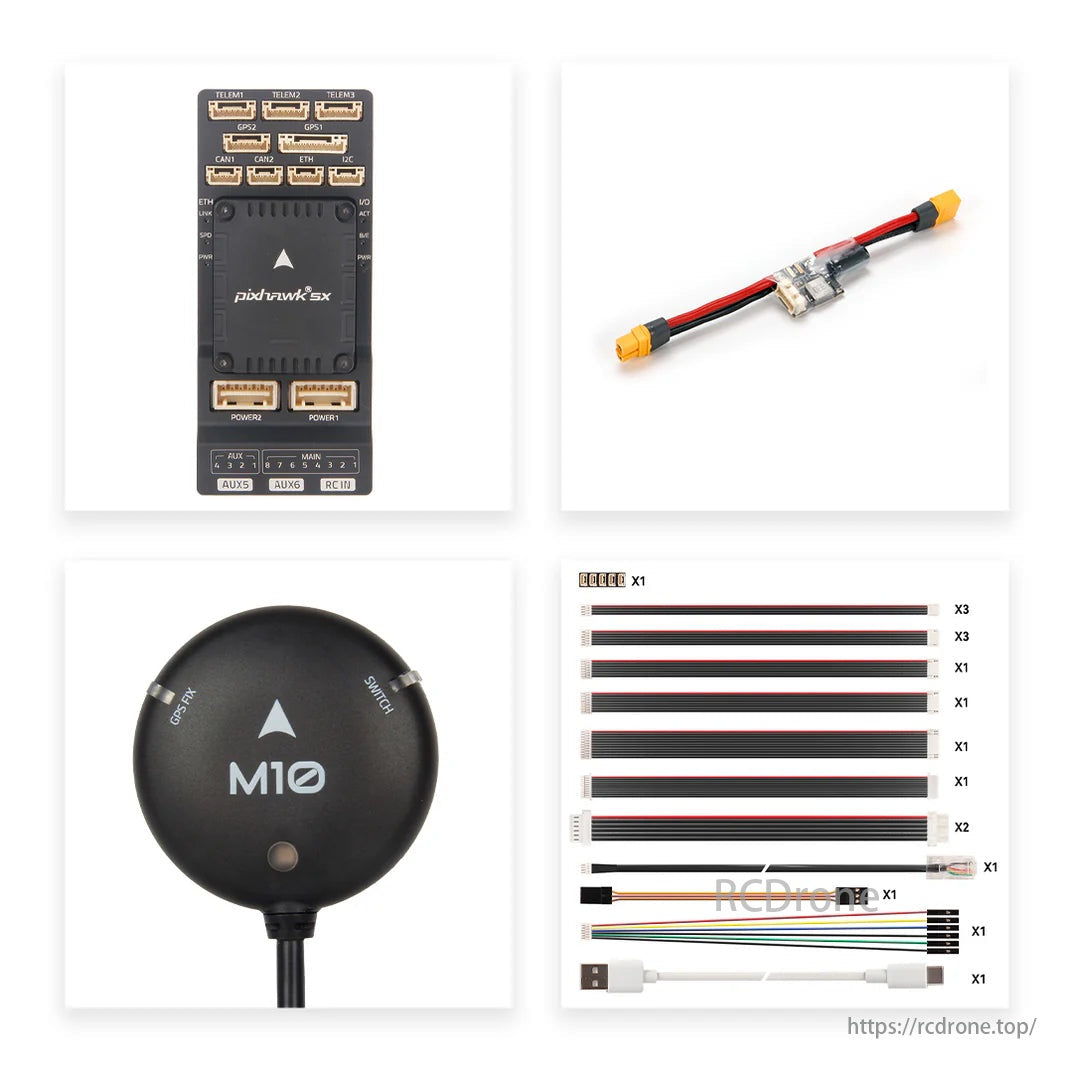
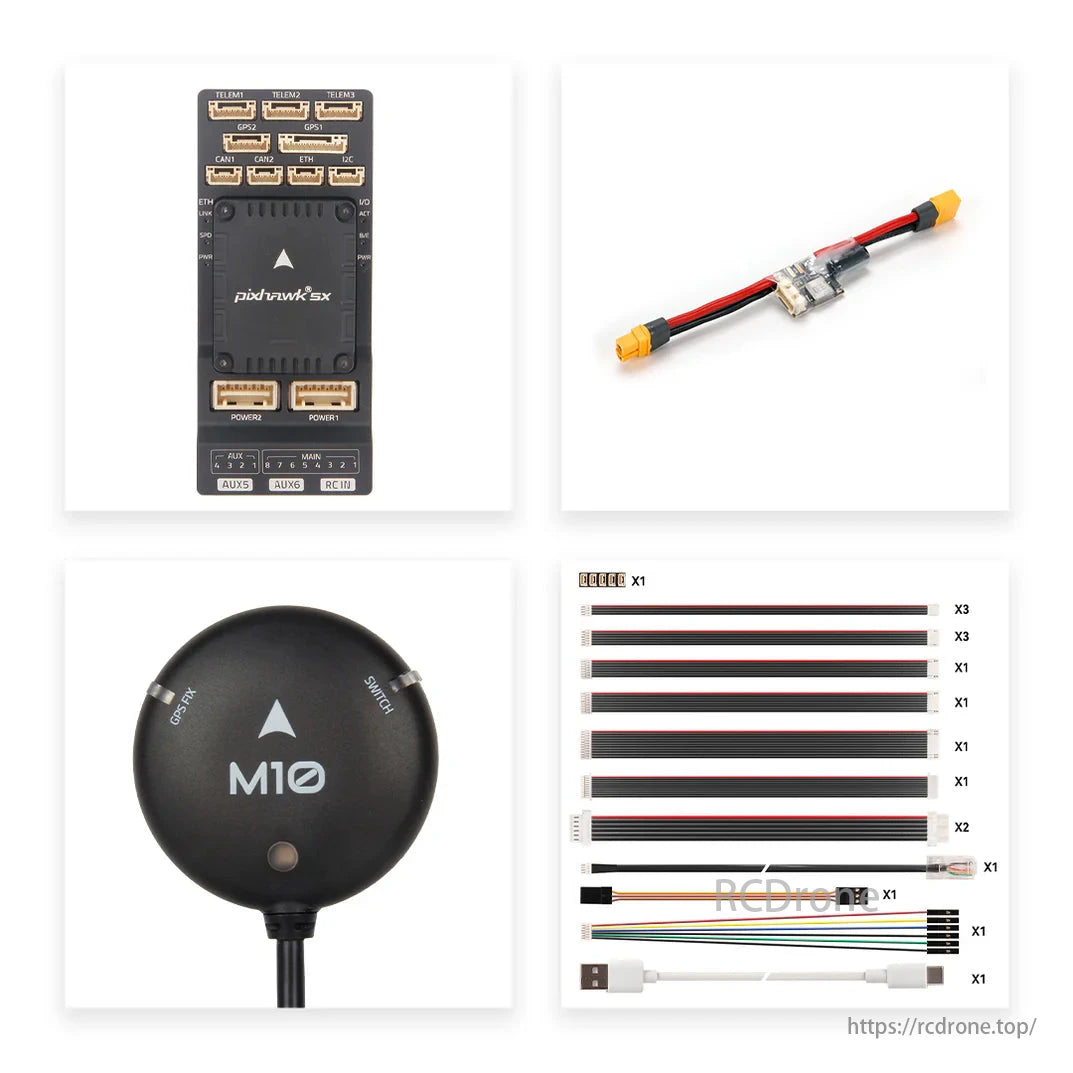
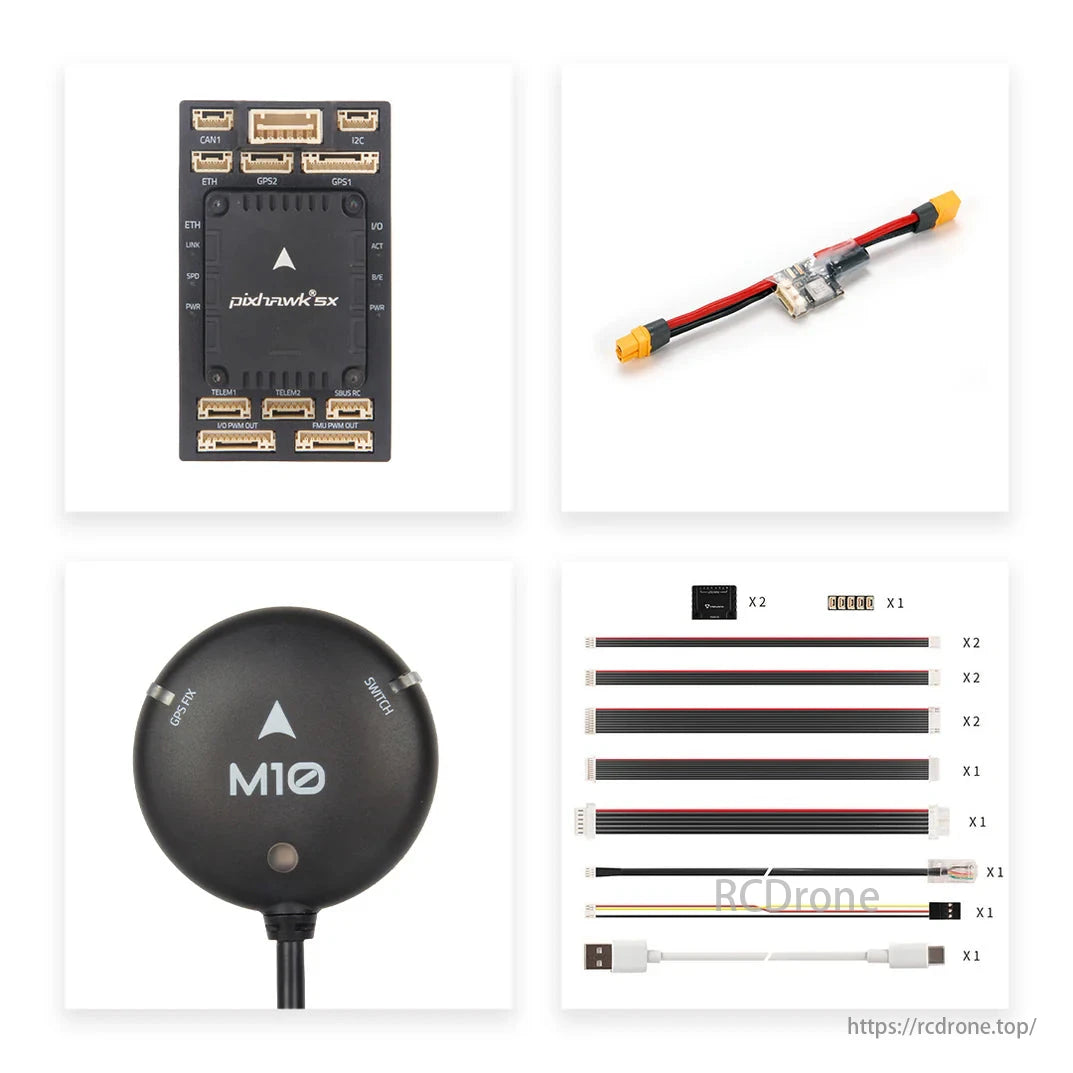
Контроллер полета Pixhawk 5X, модуль GPS M10, модуль питания и различные кабели для сборки дрона.