Holybro Pixhawk 6X (ICM-45686) Полетный контроллер – Тройной резерв IMU, STM32H753, Ethernet, совместим с PX4 и ArduPilot
Holybro Pixhawk 6X (ICM-45686) Полетный контроллер – Тройной резерв IMU, STM32H753, Ethernet, совместим с PX4 и ArduPilot
HolyBro
Не удалось загрузить сведения о доступности самовывоза
Обзор
Модульный автопилот Holybro Pixhawk 6X (ICM-45686) - это высокопроизводительный контроллер полета, разработанный для требовательных промышленных и коммерческих приложений дронов. Он оснащен тройными резервированными ИМУ ICM-45686 с технологией BalancedGyro™, двойными барометрами и процессором STM32H753 с тактовой частотой 480 МГц, что обеспечивает непревзойденную надежность, производительность в реальном времени и гибкость. Его модульная архитектура, передовая изоляция от вибраций и интерфейс Ethernet делают его идеальным для систем БПЛА, требующих надежного управления, точности и адаптивности к задачам.
Ключевые особенности
-
Тройная избыточность ИМУ: 3x ICM-45686 ИМУ (±32g) с технологией BalancedGyro™ для отказоустойчивой инерциальной навигации
-
Двойные барометры: ICP20100 и BMP388 для повышения точности высоты
-
Процессор высокой скорости: STM32H753 Cortex-M7, 480MHz, с 2MB Flash и 1MB RAM
-
Модульный дизайн: Разделяет FMU, IMU и базовую плату, соединенные через 100-контактный и 50-контактный шины Pixhawk®
-
Плата ИМУ с контролем температуры: Обеспечивает оптимальную работу датчиков в диапазоне температур
-
Интеграция Ethernet: Поддерживает высокоскоростную связь с вычислительными системами миссий
-
Поддержка цифрового блока питания: Обеспечивает более точные измерения напряжения и тока
Совершенная система изоляции: Прочный, специально разработанный материал обеспечивает высокоспектровое демпфирование вибраций
-
Совместимость с прошивкой: Поставляется с PX4 (v1.14.3+), поддерживает ArduPilot (v4.5.0+)
Спецификации
Процессоры и датчики
| Компонент | Детали |
|---|---|
| FMU Процессор | STM32H753, ARM Cortex-M7, 480MHz, 2MB Flash, 1MB RAM |
| IO Процессор | STM32F103, ARM Cortex-M3, 72MHz |
| IMU Датчики | 3x ICM-45686 (BalancedGyro™) |
| Барометр | ICP20100 & BMP388 |
| Магнитометр | BMM150 |
| Защищенный элемент | NXP SE050 Plug & Trust |
Электрические параметры
| Параметр | Value |
|---|---|
| Максимальное входное напряжение | 6В |
| USB питание | 4.75~5.25V |
| Напряжение сервопривода | 0~36V |
| Тековое ограничение Telem1 & GPS2 | 1.5A в сумме |
| Тековое ограничение других портов | 1.5A в сумме |
| Напряжение сигнала PWM | По умолчанию 3.3V (переключаемое на 5V через резистор) |
| Рабочая температура | -25°C до +85°C |
Механические размеры и вес
| Компонент | Размеры (мм) | Вес (г) |
|---|---|---|
| Контроллер полета | 38.8 x 31.8 x 16.8 | 31.3g |
| Стандартная базовая плата | 52.4 x 102 x 16.7 | 72.5g |
| Мини базовая плата | 43.4 x 72.8 x 14.2 | 26.5g |
Совместимость прошивки
-
PX4: Полностью поддерживается с версии 1.14.3 и выше
-
ArduPilot: Полностью поддерживается с версии 4.5.0 и выше
-
Поддержка прошивки прошивок через Mission Planner или QGroundControl
Приложения
Идеально подходит для интеграции в:
-
Промышленные дроны
-
Коммерческие системы БПЛА
-
VTOL самолеты
-
Академические исследовательские платформы
-
Многофункциональные и высоконадежные миссии
Детали

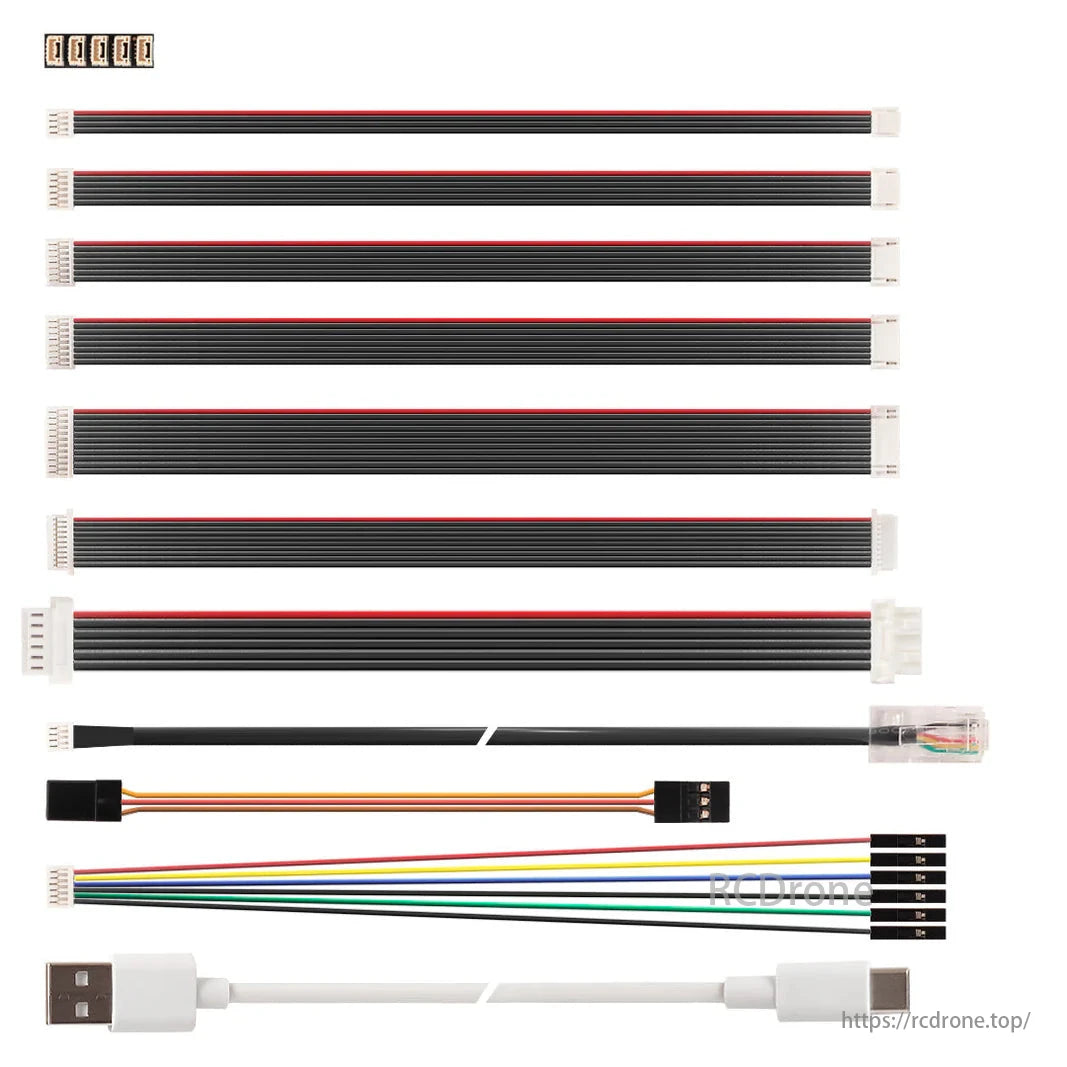
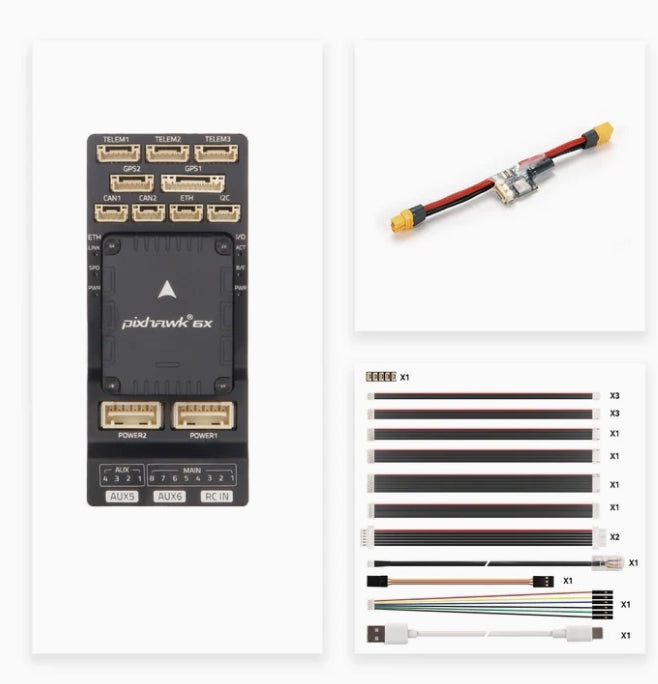
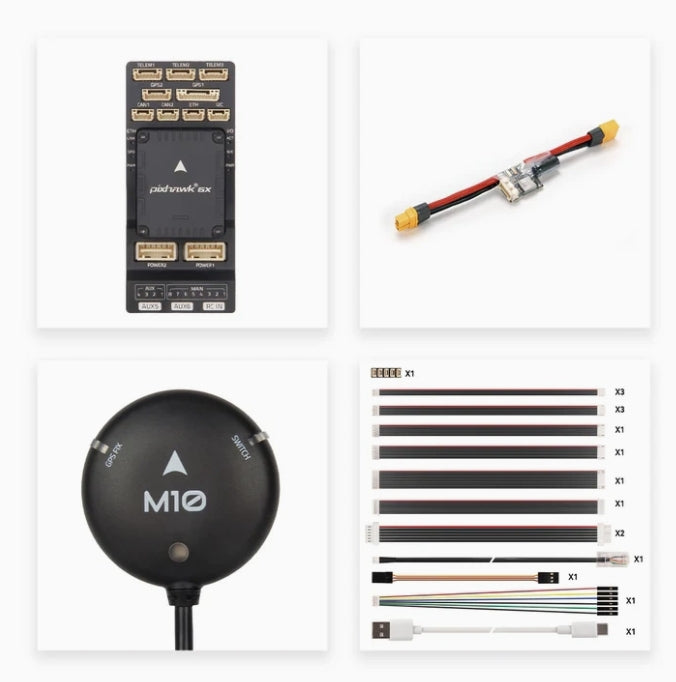
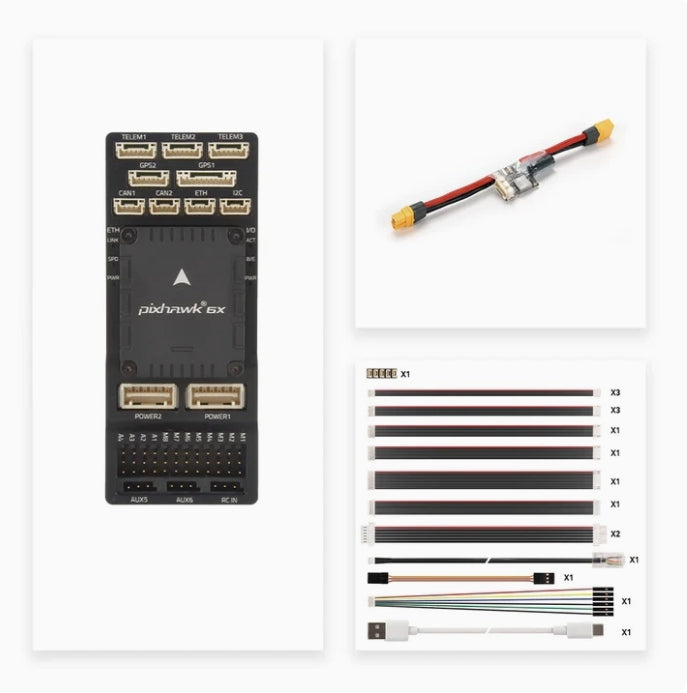
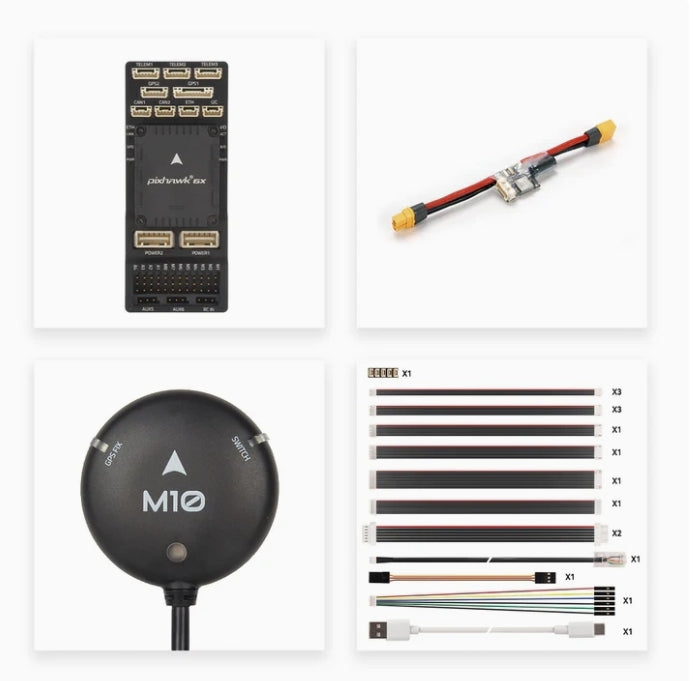
Pixhawk 6X предлагает более тонкий дизайн с двумя моделями. Он оснащен улучшенным пиновым разъемом для лучшей связи и производительности, что делает его идеальным для продвинутых приложений. Выберите подходящую модель для ваших нужд.
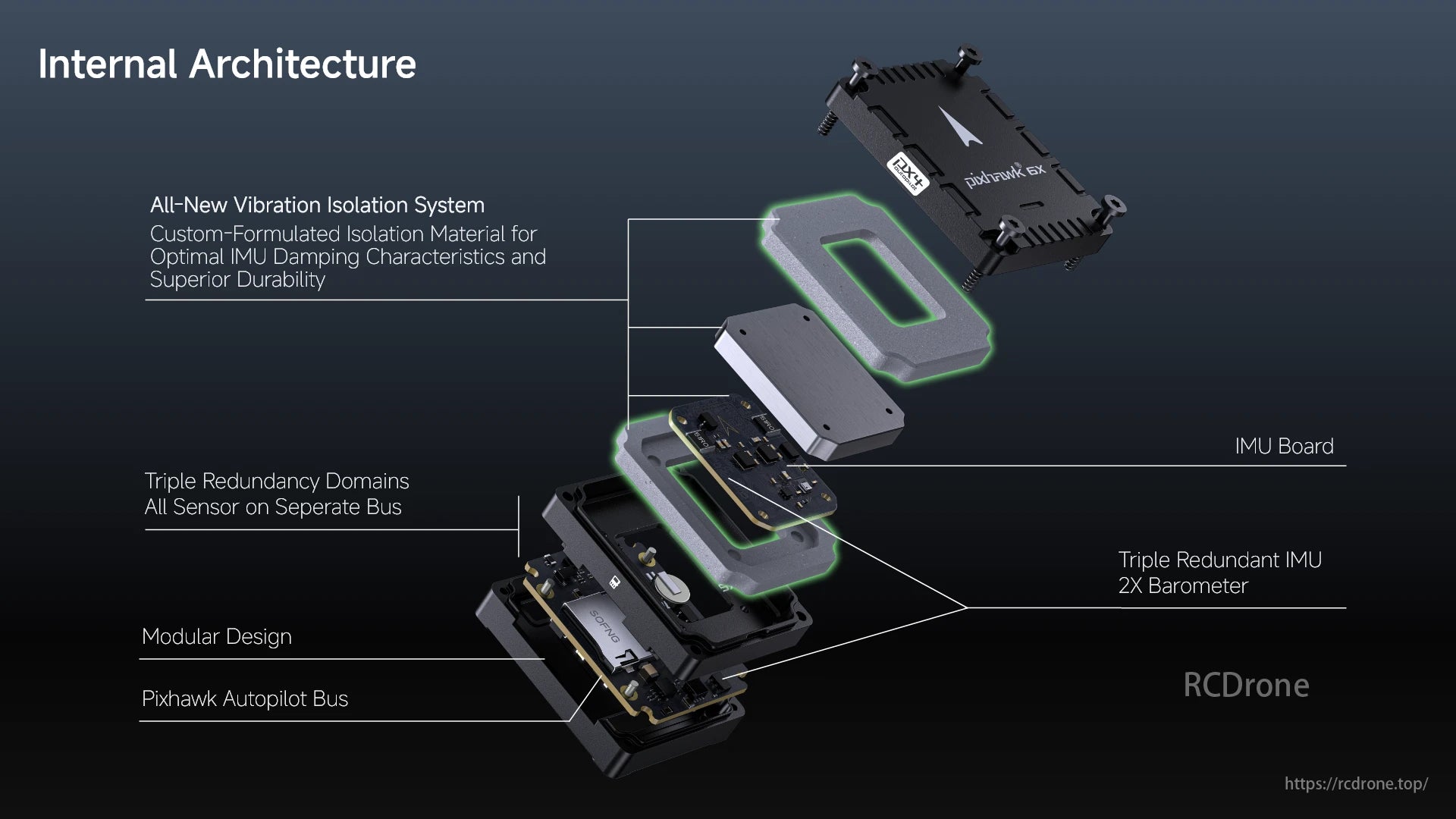
Holybro Pixhawk 6X предлагает изоляцию от вибраций, тройную избыточность, модульный дизайн, автопилотный шина, плату IMU и 2x барометра для повышения производительности.
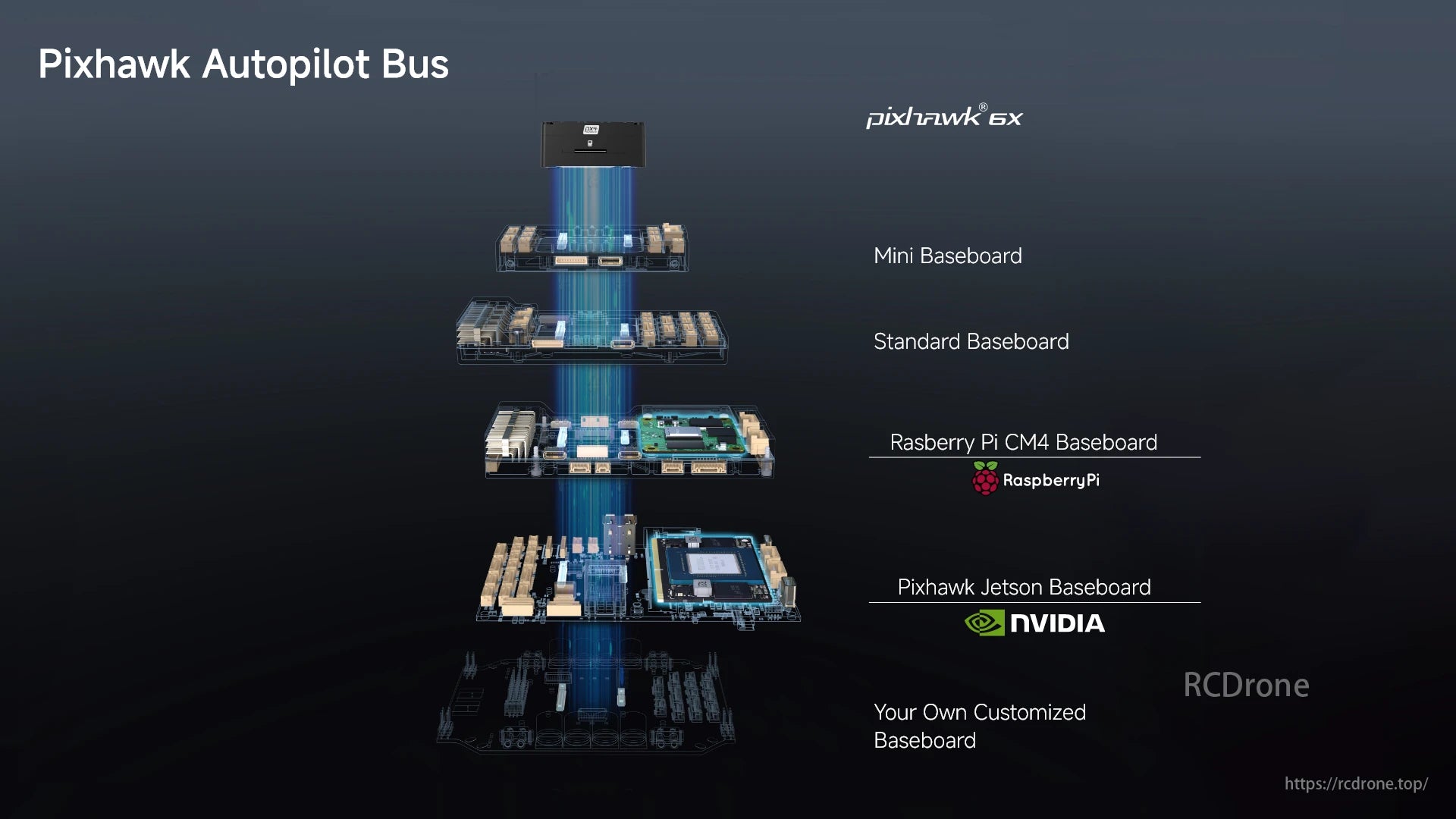
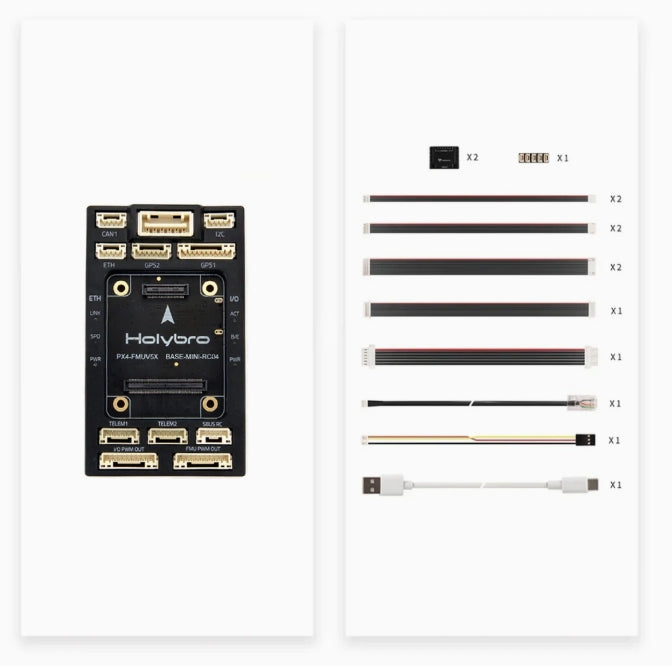
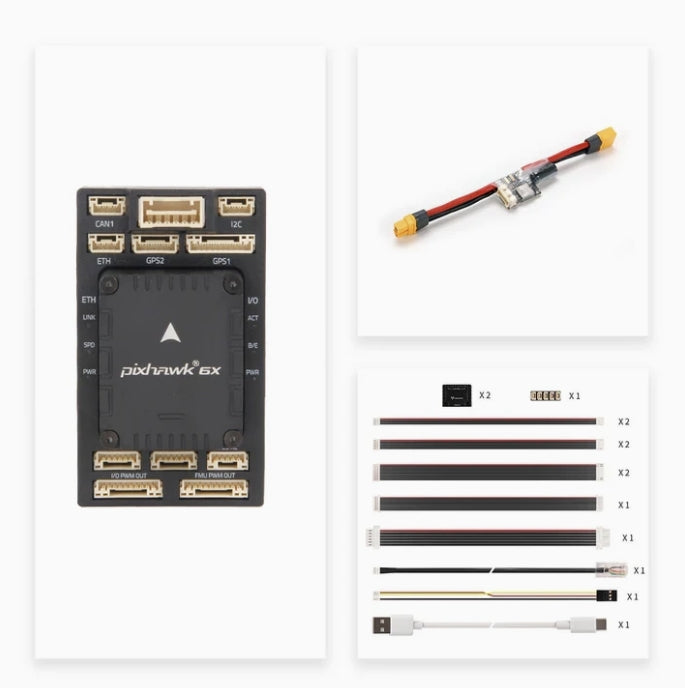
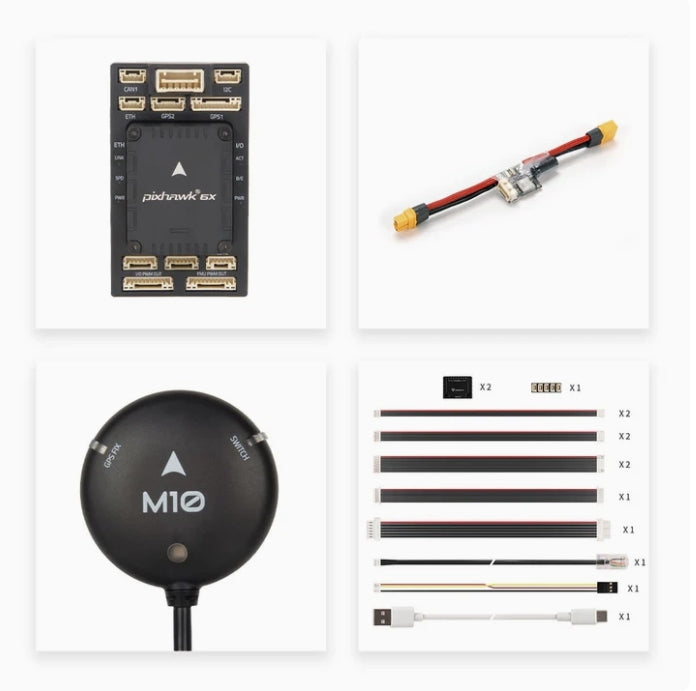
Pixhawk Автопилотная шина включает в себя Pixhawk 6X, Мини базовую плату, Стандартную базовую плату, Базовую плату Raspberry Pi CM4, Базовую плату Jetson и индивидуальные опции.

Резисторы температурной компенсации, избыточный IMU и барометр, разнообразные сенсорные технологии и изоляционный материал обеспечивают точность.

Автопилотная шина Pixhawk, 32-битный процессор STM H753 (480 МГц), IMU Invensense ICM45686 с технологией BalancedGyro и защищенный элемент NXP EdgeLock SE050 интегрированы в плату FMU.
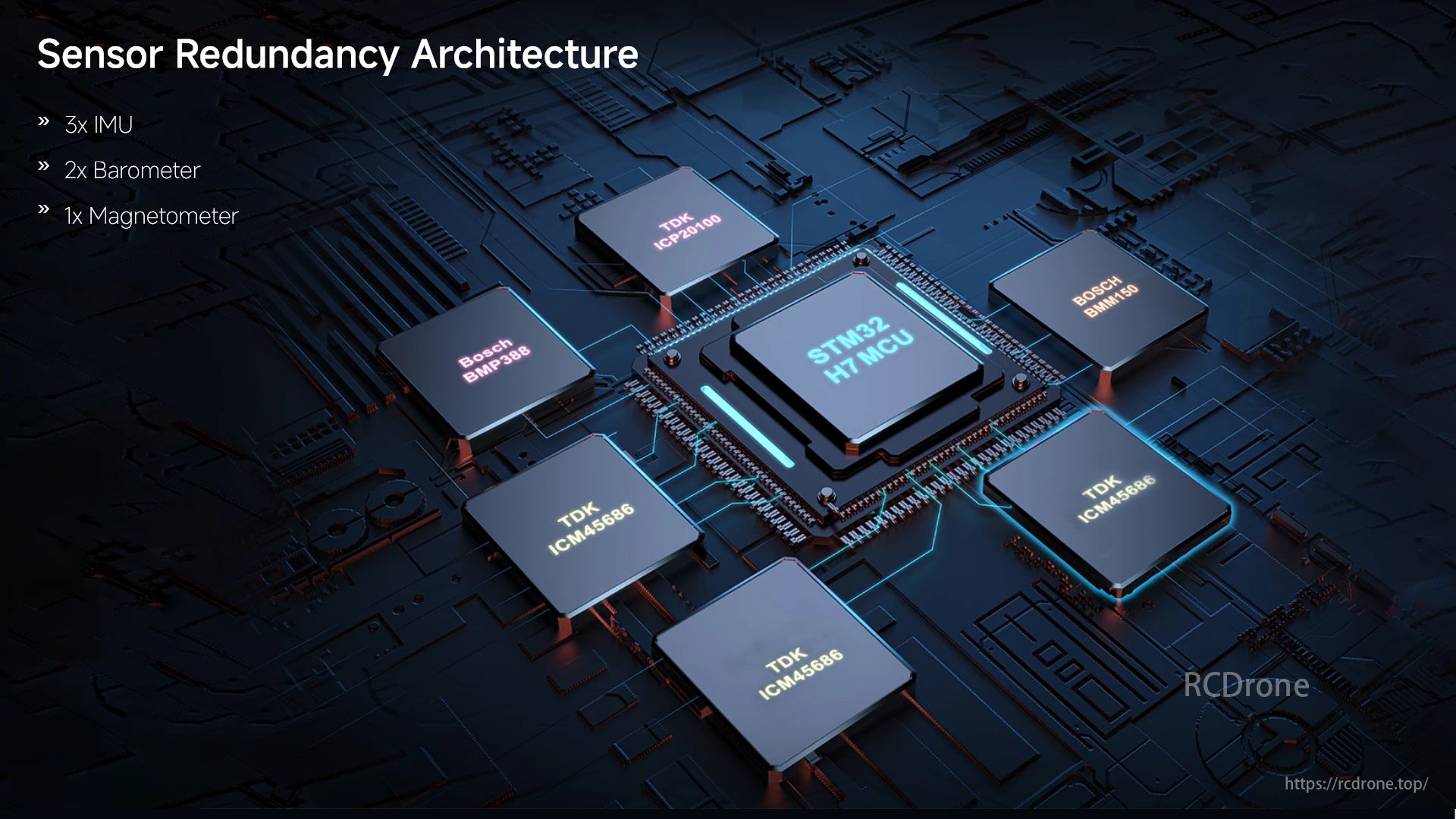
Архитектура избыточности сенсоров с 3x IMU, 2x барометром и 1x магнитометром.Особенности: STM32 H7 MCU, TDK ICM-45686, Bosch BMP388 и BMM50 датчики для повышения производительности.
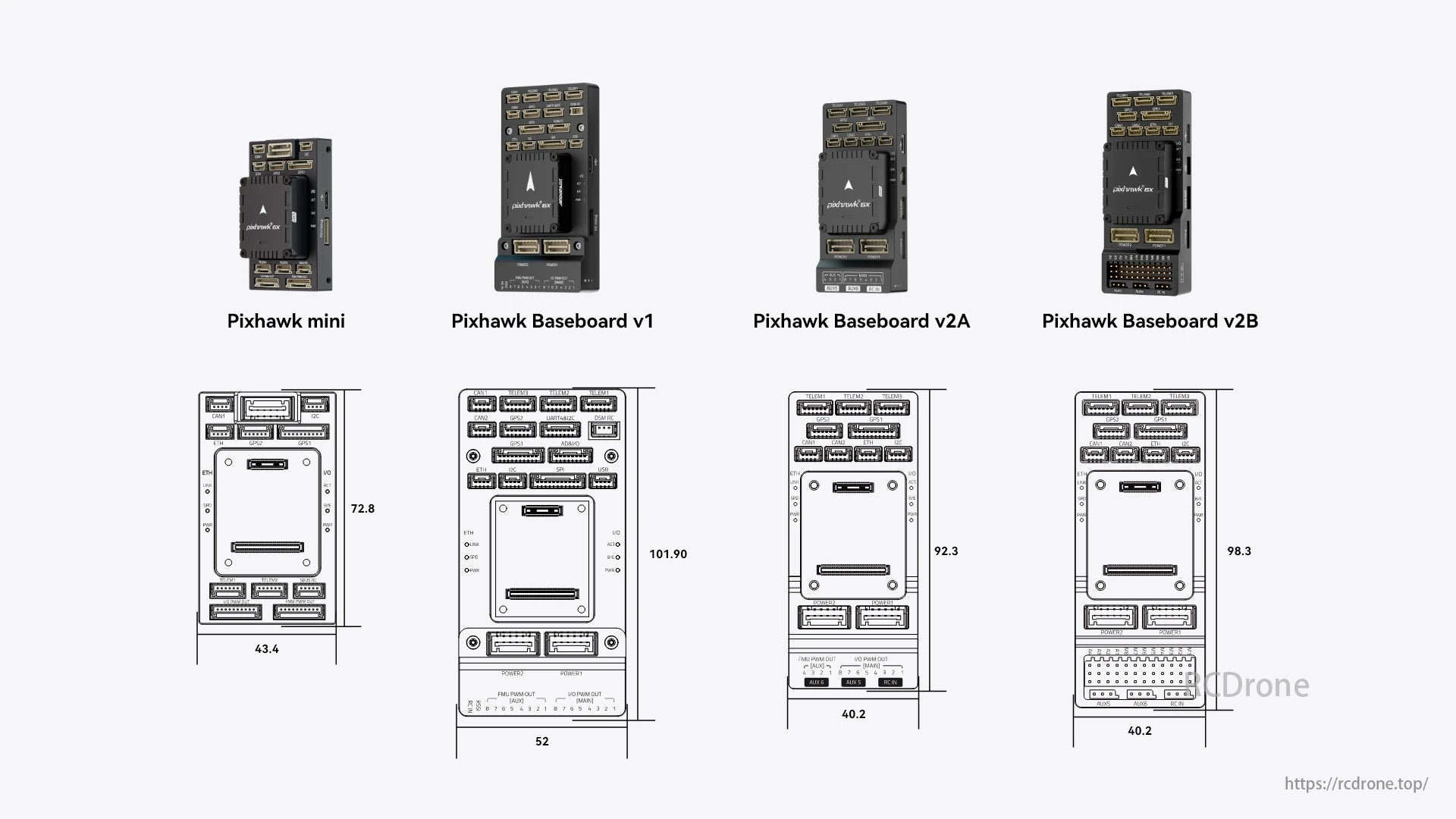
Контроллеры полета Pixhawk mini, Baseboard v1, v2A и v2B с размерами: 43.4x72.8, 52x101.90, 40.2x92.3 и 40.2x98.3 соответственно. На каждой модели видны различные порты и разъемы.
Related Collections