Контроллер полета для автопилота Holybro Pixhawk 6X Pro
Контроллер полета для автопилота Holybro Pixhawk 6X Pro
HolyBro
Не удалось загрузить сведения о доступности самовывоза
Ключевой момент дизайна
- Высокопроизводительный промышленный инерциальный измерительный блок ADIS16470 с большим динамическим диапазоном акселерометра (±40 г), идеально подходит для точное определение движения в сложных условиях применения БПЛА
- Абсолютно новый современный прочный виброизоляционный материал с резонансной частотой в более высоком спектре, идеально подходящий для промышленных и коммерческих беспилотных летательных аппаратов.
- Тройной резервный IMU и двойной резервный барометр на отдельных шинах
- Высокопроизводительный процессор STM32H753
- Модульный контроллер полета: отдельные IMU, FMU и базовая система
- Конструкция, ориентированная на безопасность, включает датчики от разных производителей и модельных рядов.
- Независимый LDO-стабилизатор питает каждый датчик с независимым управлением питанием.
- Интерфейс Ethernet для высокоскоростной интеграции с бортовым компьютером. Безтрансформаторная схема может быть реализована с использованием 50-омных согласующих резисторов на целевом устройстве. (AN2190 50 Ом оконечная нагрузка).
- Плата IMU с регулируемой температурой, обеспечивающая оптимальную рабочую температуру IMU
- Аппаратно переключаемый режим сигнала 3,3 В или 5 В (требуется модификация базовой платы)
Примечание:
- Для работы этого продукта требуется модуль FC + плата основания. Модуль FC или базовая плата сами по себе не будут функционировать.
Спецификация
Процессоры и датчики
- Процессор FMU: STM32H753
- 32-битный Arm® Cortex®-M7, 480 МГц, 2 МБ флэш-памяти, 1 МБ ОЗУ
- Процессор ввода-вывода: STM32F103
- 32-битный Arm® Cortex®-M3, 72 МГц, 64 КБ SRAM
- Бортовые датчики
- Акселератор/гироскоп: ADIS16470
- ±40г, Виброизолированный, промышленный ИИБ
- Акселератор/гироскоп: IIM-42652
- ±16г, Виброизолированный, промышленный ИИБ
- Акселератор/гироскоп: ICM-45686 с технологией BalancedGyro™
- ±32g, жесткое крепление
- Барометр: ICP20100
- Барометр: BMP388
- Маг: BMM150
- Акселератор/гироскоп: ADIS16470
- NXP Аппаратный защитный элемент EdgeLock SE050 Plug & Trust
Электрические данные
- Номинальные напряжения:
- Максимальное входное напряжение: 6 В
- Входное напряжение USB: 4,75~5,25 В
- Вход сервопривода: 0~36 В
- Текущие рейтинги:
- Ограничитель выходного тока Telem1: 1,5А
- Ограничитель выходного тока всех остальных портов: 1,5 А
- Рабочая температура: -25-85°C
Механические данные
- Размеры
- Модуль контроллера полета: 38,8 x 31,8 x 30,1 мм
- Стандартная плинтусная плата: 52,4 x 102 x 16,7 мм (Алюминий)
- Мини-плинтуса: 43,4 x 72,8 x 14,2 мм
- Масса
- Модуль управления полетом: 50 г
- Стандартный плинтус: 72,5 г (Алюминий)
- Мини-плинтус: 26.5г
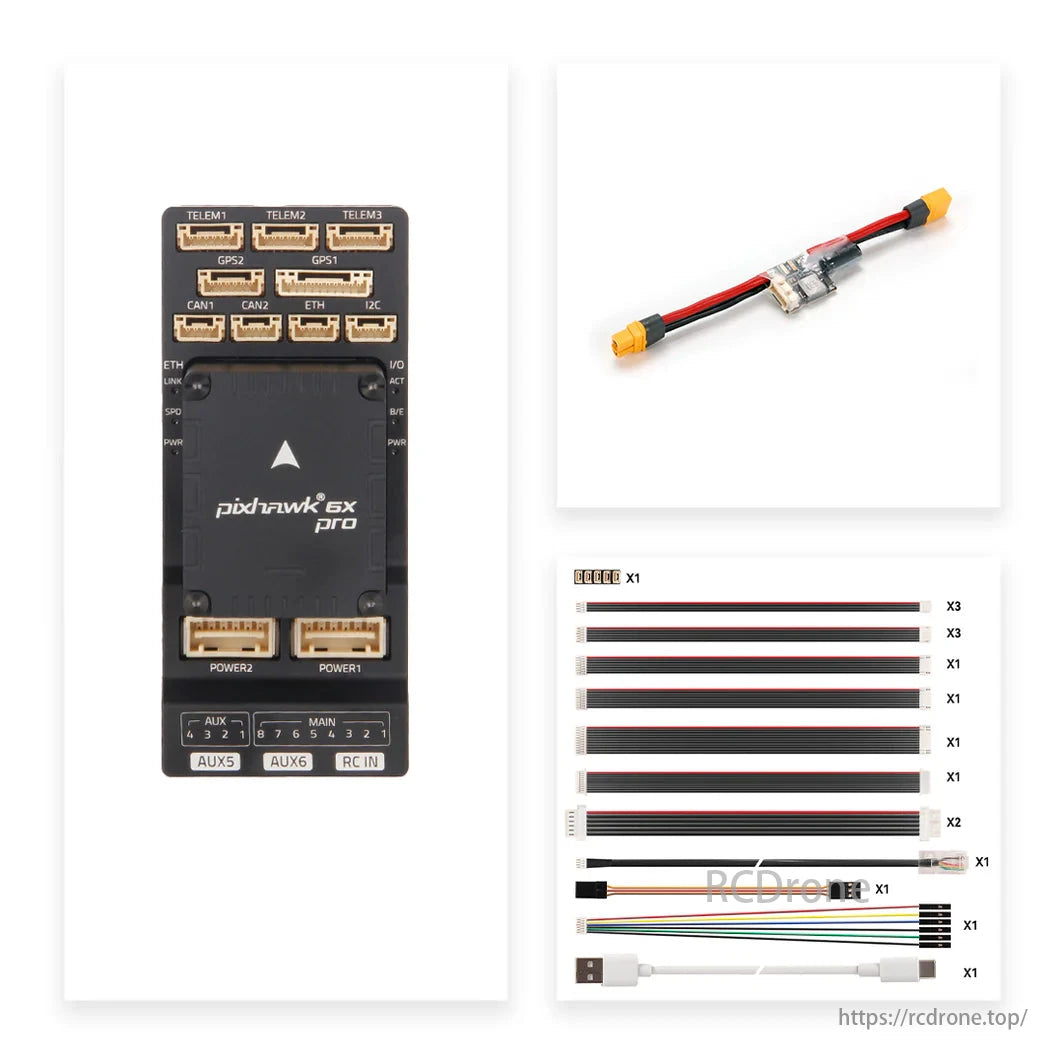
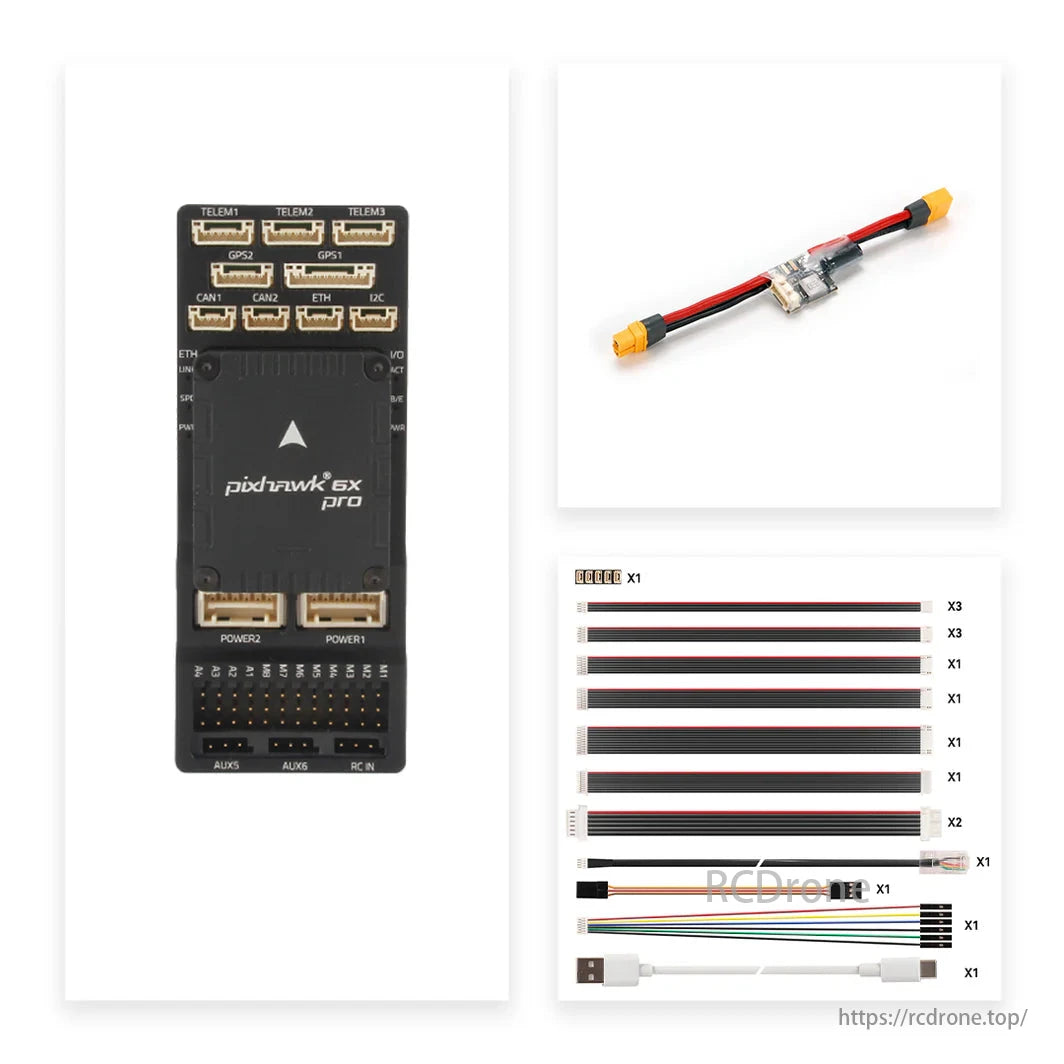
В пакет включено
Модуль FC включает в себя только:
- Пиксхок Модуль контроллера полета 6X Pro
- Дополнительная замена демпфирующего устройства IMU (мягче, чем предустановленное)
Стандартный набор V2A/V2B/Mini включает в себя:
- Модуль контроллера полета Pixhawk 6X Pro
- Стандартная базовая плата Pixhawk v2A/ Стандартная базовая плата Pixhawk v2B/ Мини-плинтуса
- Модуль питания высокого напряжения PM02D
- Комплект кабелей
Подробности
Абсолютно новая конструкция виброизоляции
Эта новая конструкция виброизоляции использует переменный токИзготовленный по индивидуальному заказу прочный изоляционный материал на основе силикона вместо традиционной пены. БПодтвержденный обширными исследованиями, разработками и испытаниями, он обеспечивает оптимальные характеристики демпфирования IMU с резонансной частотой в более высоком спектре, идеально подходит для промышленных и коммерческих беспилотных летательных аппаратов.
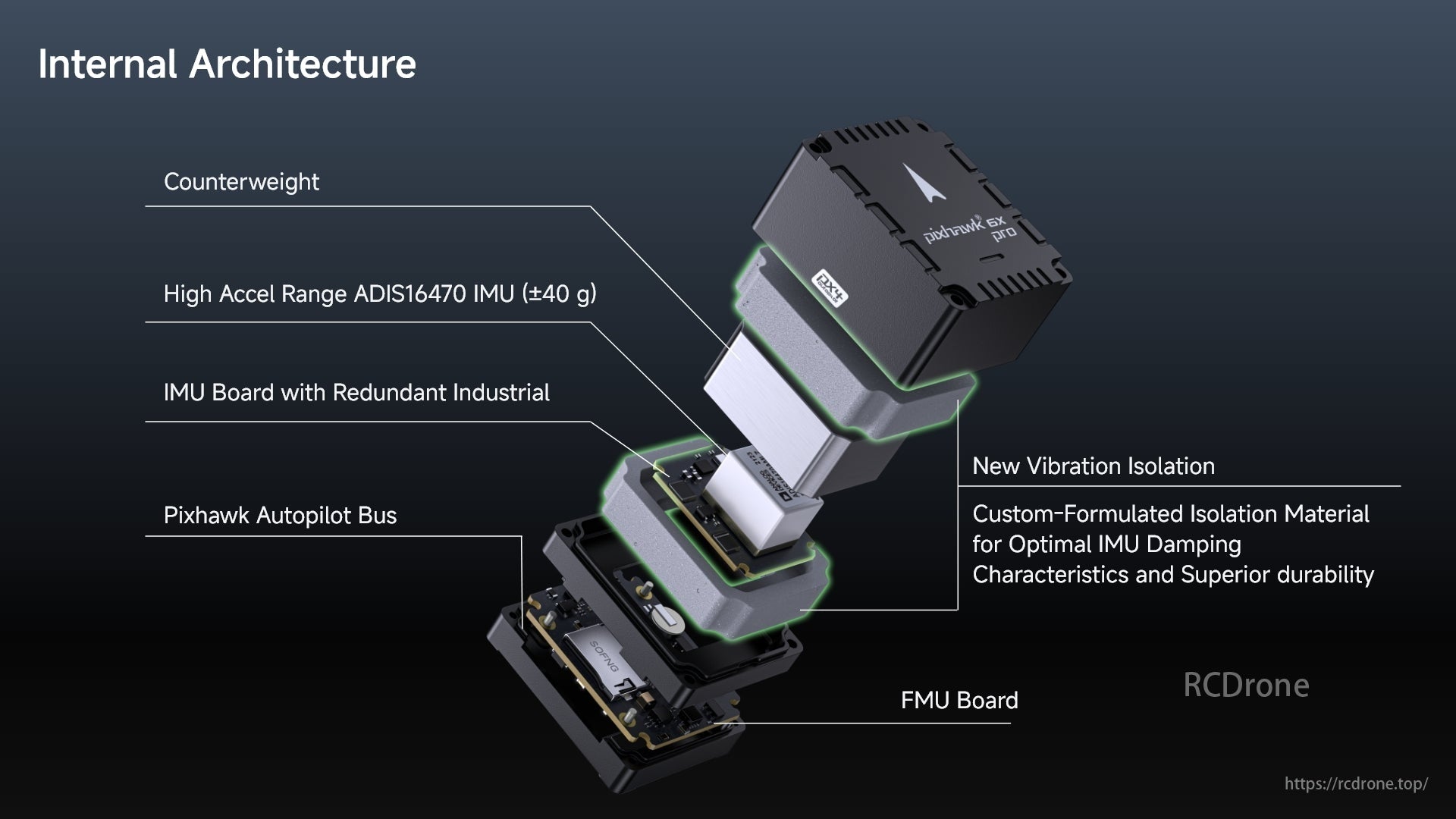
Внутренняя архитектура: противовес, инерциальный измерительный блок ADIS16470 с высоким диапазоном ускорения (±40 g), резервная промышленная плата инерциального измерительного блока, шина автопилота Pixhawk, новая виброизоляция, плата FMU.
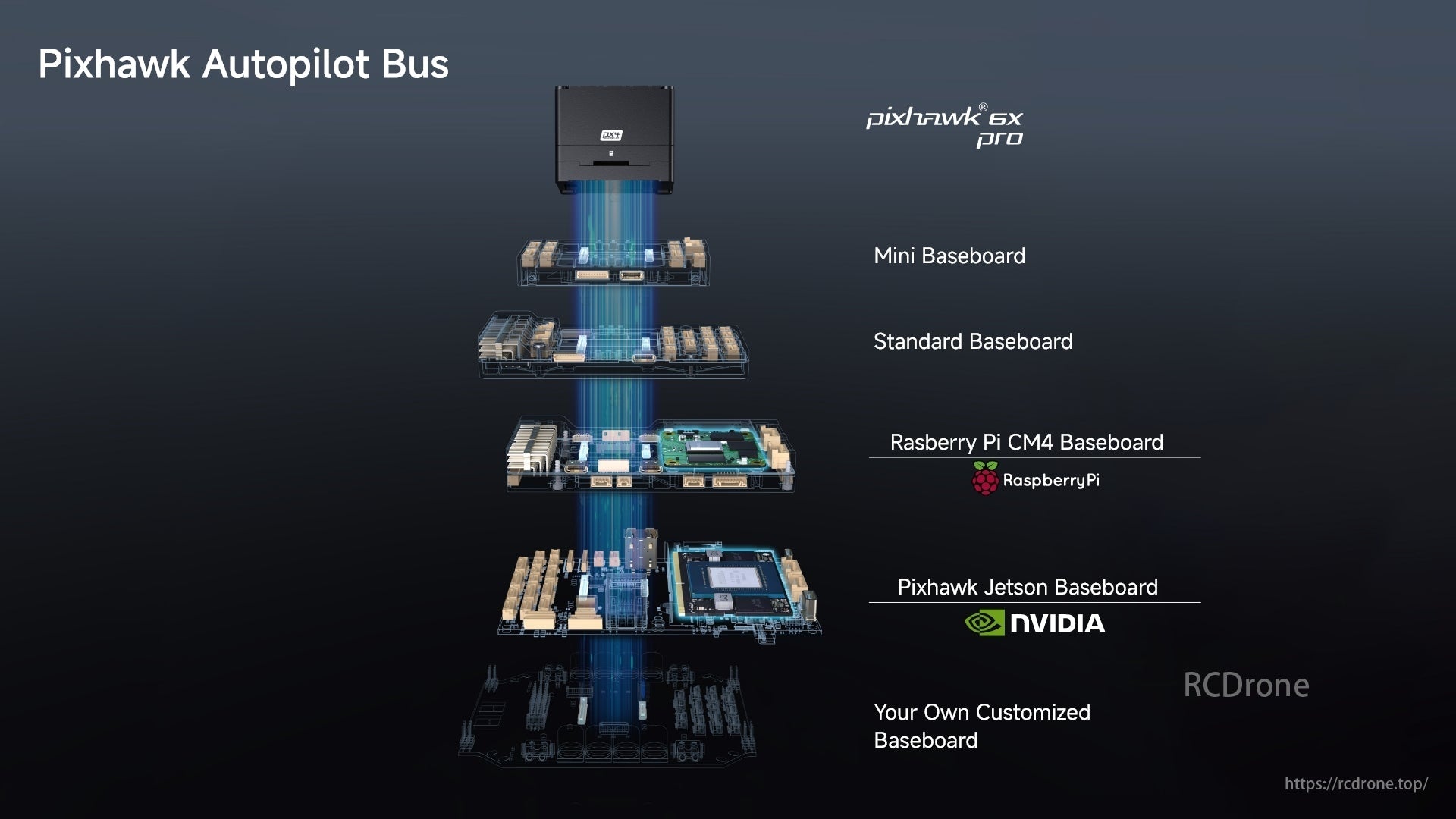
Шина Pixhawk Autopilot соединяет Mini, Standard, Raspberry Pi CM4, платы Jetson и пользовательские платы.
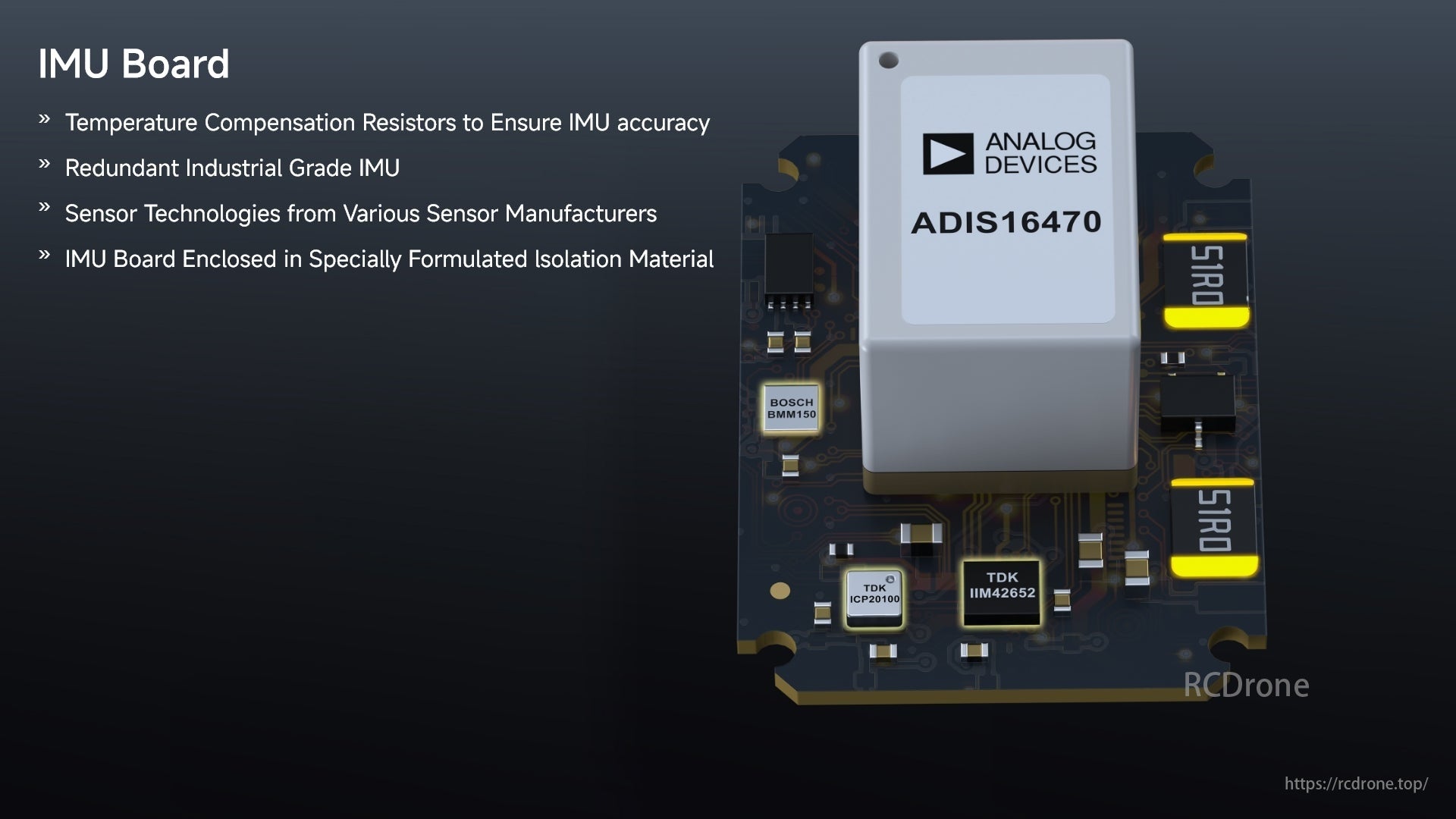
Плата IMU оснащена резисторами температурной компенсации, резервным IMU промышленного класса, датчиками от различных производителей и заключена в изоляционный материал.
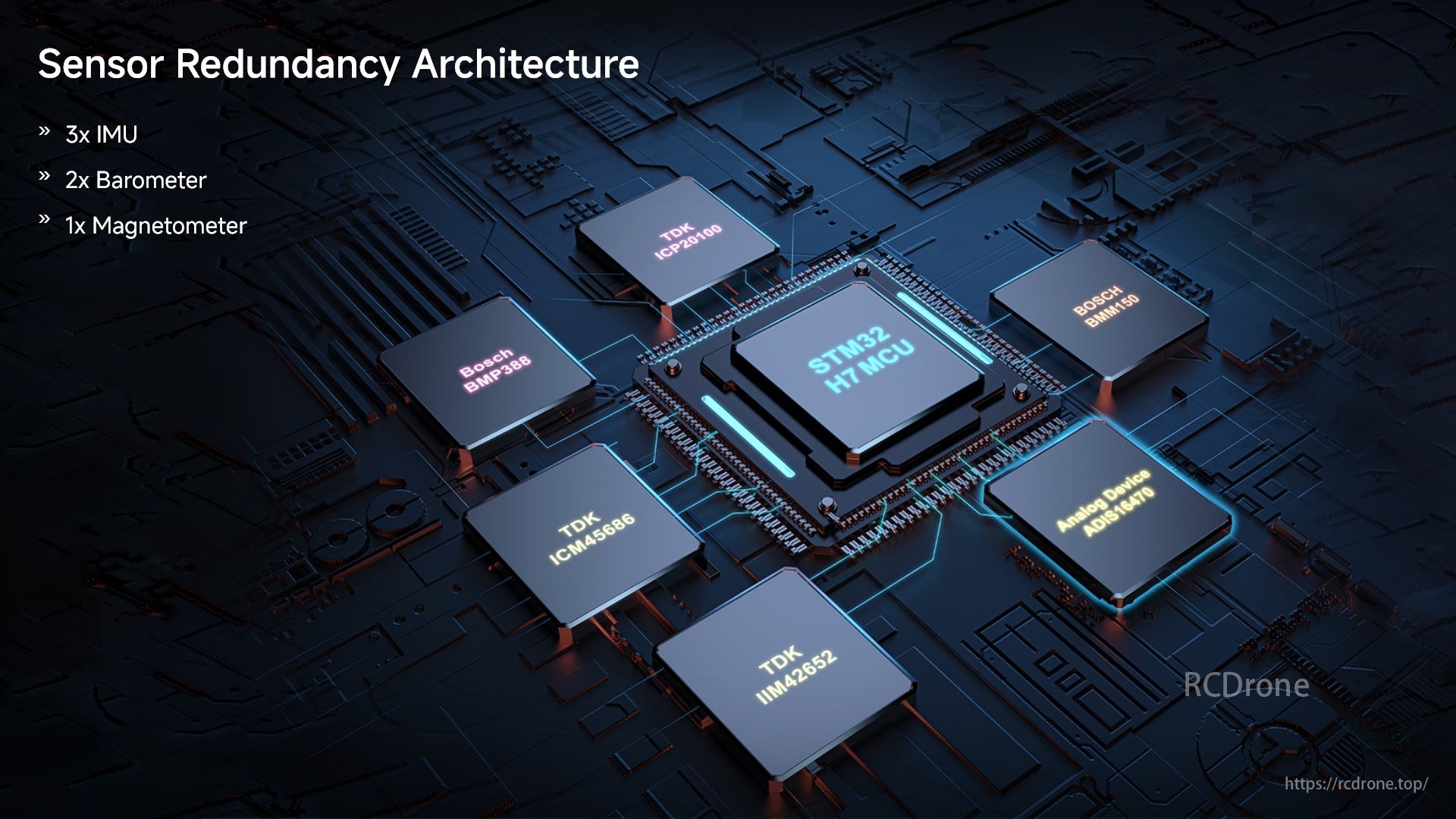
Архитектура избыточности датчиков включает в себя 3 инерциальных измерительных блока, 2 барометра и 1 магнитометр, а также такие компоненты, как микроконтроллер STM32 H7, микросхемы TDK, Bosch BMP388 и аналоговые устройства ADIS16470.
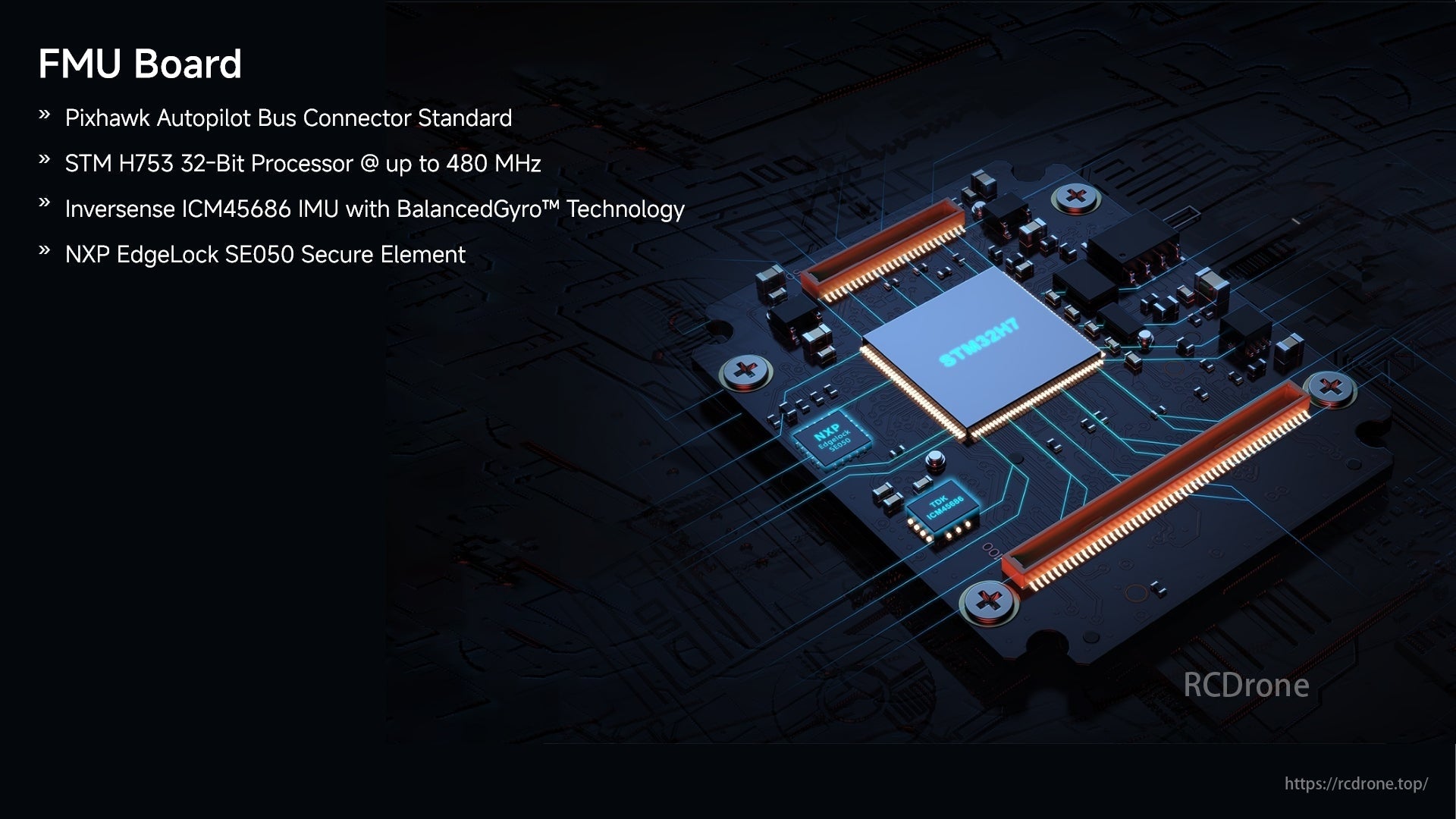
Плата FMU оснащена стандартным разъемом шины автопилота Pixhawk, 32-разрядным процессором STM H753 с тактовой частотой до 480 МГц, инерциальным измерительным блоком Inversense ICM45686 с технологией BalancedGyro и элементом безопасности NXP EdgeLock SE050.
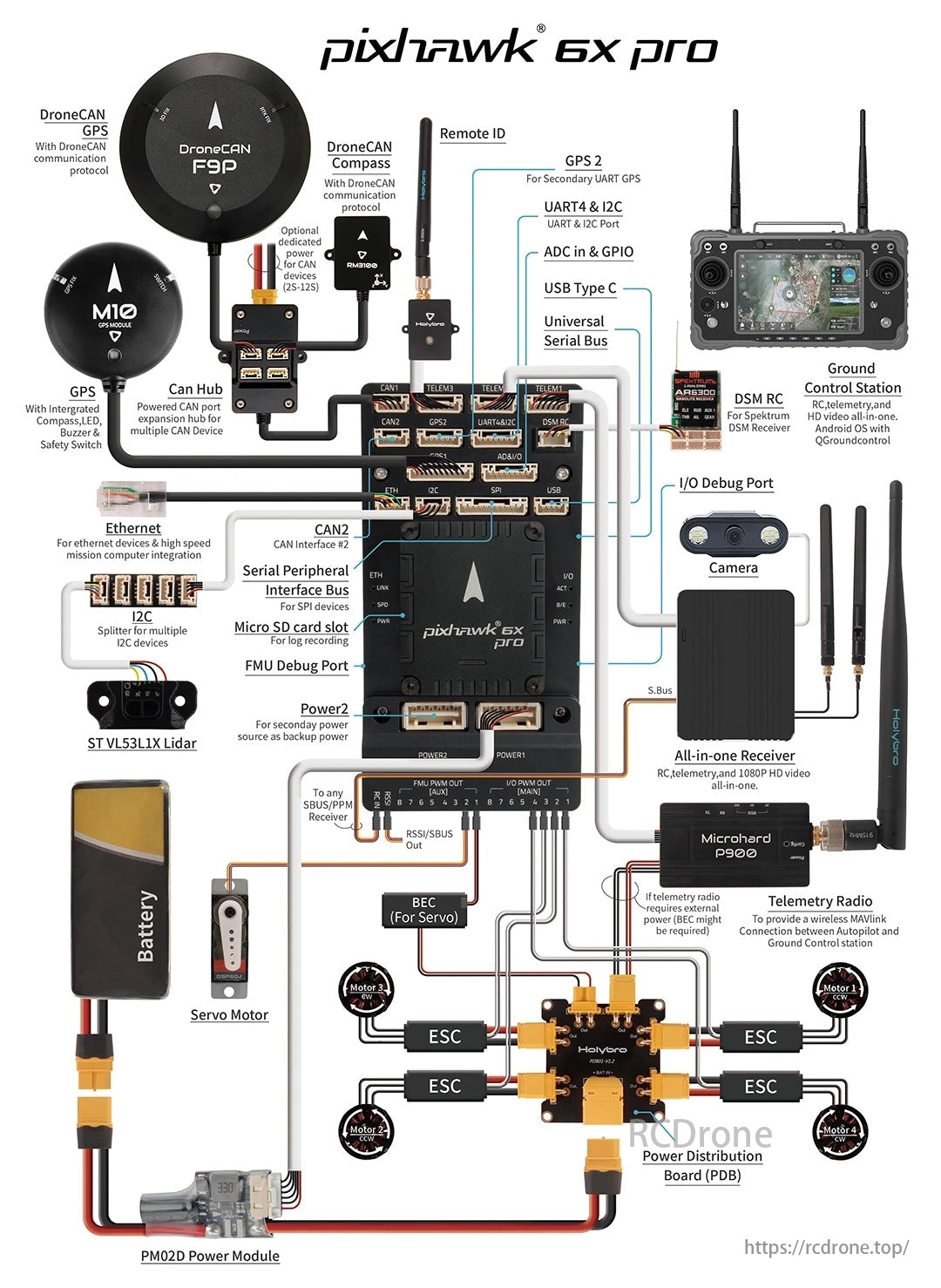
На схеме Pixhawk 6X Pro показаны соединения для системы автопилота дрона, включая модули GPS, компас, наземную станцию управления, камеру, телеметрическую радиостанцию, ESC, двигатели и плату распределения питания. Для связи между компонентами используются различные интерфейсы, такие как CAN, I2C, UART и USB.