Комплект базовой платы Holybro Pixhawk Jetson с 6X/6X Pro и NVIDIA Jetson
Комплект базовой платы Holybro Pixhawk Jetson с 6X/6X Pro и NVIDIA Jetson
HolyBro
Не удалось загрузить сведения о доступности самовывоза
Обзор
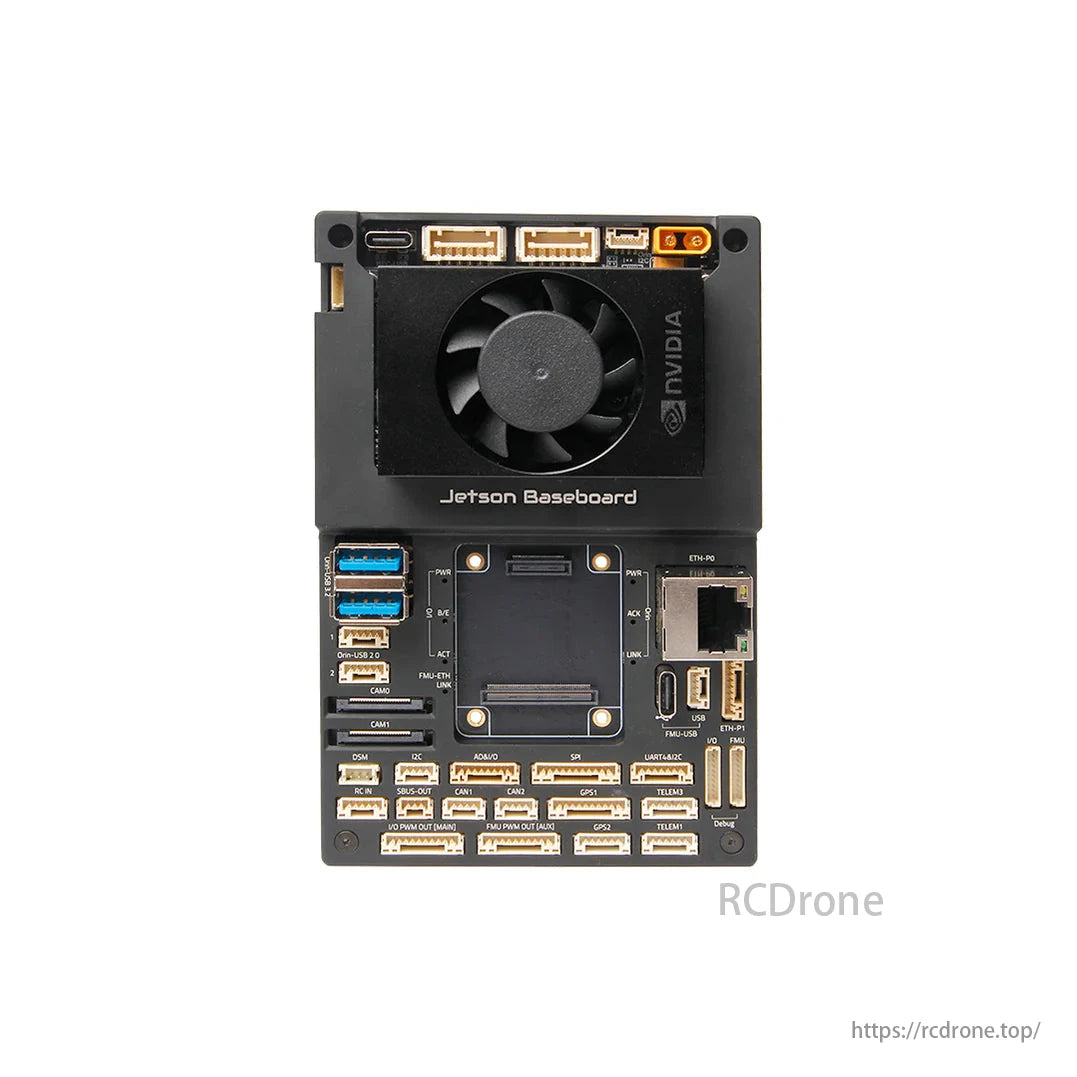
The Плинтус Holybro Pixhawk Jetson разработан на основе Спецификация Pixhawk Autopilot Bus (PAB) с открытым исходным кодом и легко интегрируется с Несущая плата NVIDIA Jetson Orin NX/Nano. Форм-фактор PAB обеспечивает совместимость с любым контроллером полета PAB, включая Пиксхок 6X. Эта плата объединяет вычислительную мощность NVIDIA Джетсон с возможностями управления полетом Пиксхок, что делает его идеальным для современных автономных приложений.
Основные характеристики
-
Единая система: Комбинаты Пиксхок и NVIDIA Джетсон в одной доске.
-
Бесперебойное подключение: Джетсон и Пиксхок общаются через UART, CAN и коммутатор Ethernet.
-
Широкая совместимость: Поддерживает Джетсон Орин NX и Орин Нано.
-
Высокоскоростное расширение: Функции 2 слота для ключей M.2 для WiFi/Bluetooth и NVMe SSD.
-
Интеграция Pixhawk 6X: Оснащен Датчики ICM-45686 для улучшения управления полетом.
Процессоры и датчики
Процессор FMU:
-
STM32H753
-
32-битный ARM Cortex-M7, 480 МГц
-
2 МБ флэш-памяти, 1 МБ ОЗУ
Процессор ввода-вывода:
-
STM32F103
-
32-битный ARM Cortex-M3, 72 МГц
-
64КБ статической памяти
Бортовые датчики (Rev8)
-
Акселерометр/Гироскоп: 3x ИКМ-45686 (с технологией BalancedGyro™)
-
Барометр: ICP20100 и BMP388
-
Магнитометр: БММ150
Порты и возможности подключения на базовой плате
Соединители Jetson
-
2 порта Gigabit Ethernet (Подключено к Jetson и Autopilot через Ethernet-коммутатор RTL8367S)
-
2 входа для камер MIPI CSI (4 полосы каждая, 22-контактный Raspberry Pi Cam FFC)
-
2 порта USB 3.0 Host (USB-A, ограничение тока 5А)
-
2x USB2.0 хост-портов (5-контактный JST-GH)
-
USB 2.0 для отладки (USB-C)
-
Выход Mini HDMI
-
2 слота M.2:
-
Ключ M (2242) для NVMe SSD (PCIEx4)
-
Клавиша E (2230) для WiFi/BT (PCIEx2, UART, USB, I2S)
-
-
CAN-порт (Подключено к Автопилот CAN2, 4-контактный JST-GH)
-
Порты SPI, I2C, I2S, UART (Различные разъемы JST-GH)
-
Порт питания вентилятора
-
Потребляемая мощность: Разъем XT30, 7-21 В (3S-4S)
-
UBEC 12A (3-14S) Рекомендуется для приложений >4S
Разъемы автопилота
-
Интерфейс шины автопилота Pixhawk: 100-контактный и 50-контактный Hirose DF40
-
Резервные цифровые входы модуля питания
-
Поддержка монитора питания I2C
-
Порты GPS и аварийного выключателя: 10-контактный и 6-контактный JST-GH
-
2x CAN-порта (4-контактный JST-GH)
-
3 порта телеметрии (JST-GH, один подключен к UART1 Jetson)
-
16 выходов ШИМ (2x 10-контактных JST-GH)
-
USB 2.0 (USB-C и 4-контактный JST-GH)
-
Вход DSM (3-контактный JST-ZH, шаг 1,5 мм)
-
Вход RC (PPM/SBUS, 5-контактный JST-GH)
-
Порт SPI для внешней шины датчиков (SPI5, 11-контактный JST-GH)
-
2x отладочных порта (FMU и IO, 10-контактный JST-SH)
Требования к питанию
-
Входное напряжение: 7-21 В (3S-4S) через разъем XT30
-
Минимальные требования к мощности: 8 В/3 А (зависит от периферийных устройств)
-
Поддерживает внешний UBEC 12A (3-14S) для резервирования и приложений с более высоким напряжением
-
Встроенная защита от перенапряжения
Размеры и вес
-
Размер платы: 126 х 80 х 38 мм (без Jetson и Flight Controller)
-
Масса: 203.2г (Включая Jetson, радиатор, контроллер полета, SSD, модуль Wi-Fi)
Технические характеристики UBEC-12A
-
Входное напряжение: 3~14S (XT30)
-
Выходное напряжение: 6.0В/7.2В/8.0В/9.2В (7,2 В рекомендуется для Jetson)
-
Непрерывный выходной ток: 12А
-
Импульсный выходной ток: 24А
-
Размер: 48 х 33,6 х 16,3 мм
-
Масса: 47,8 г
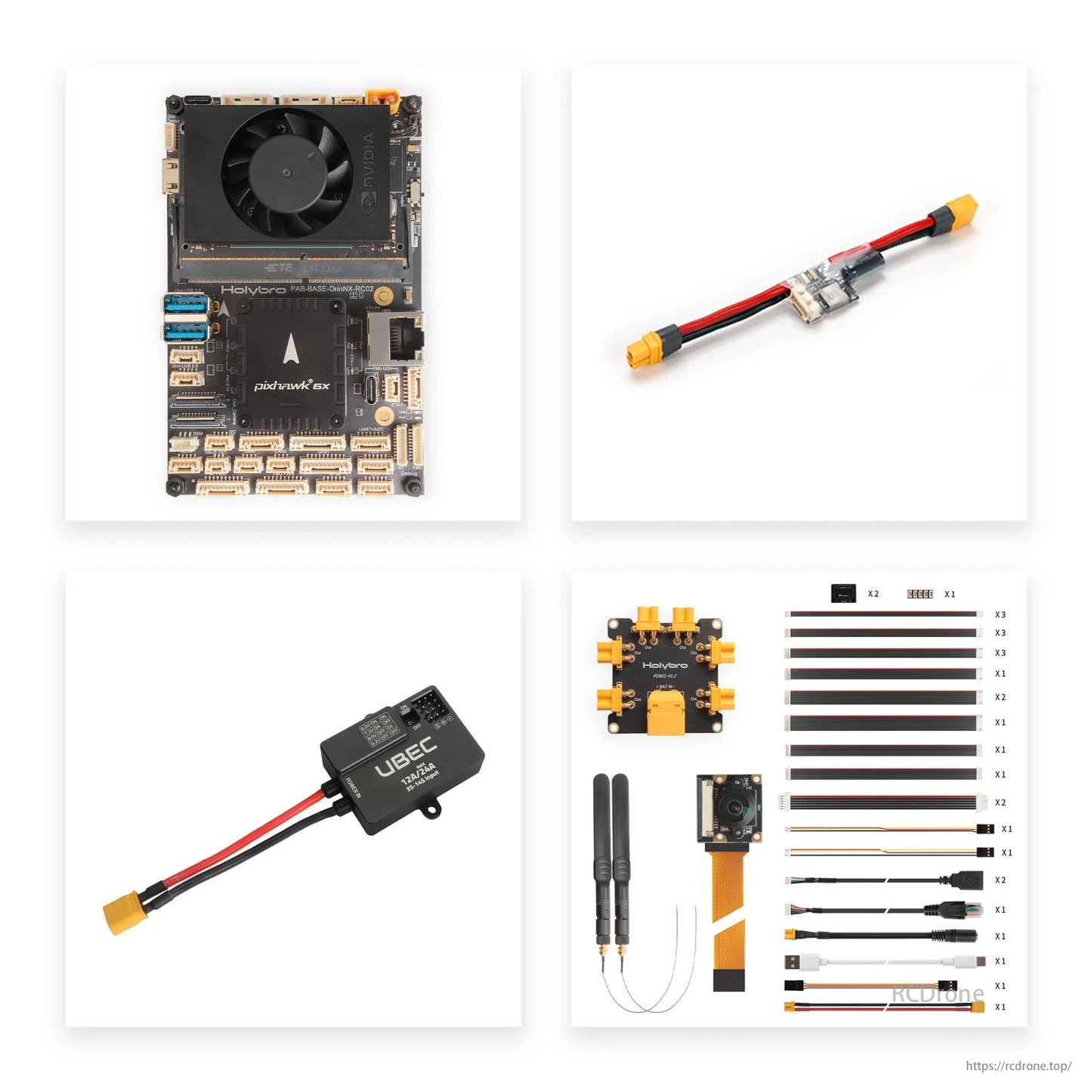
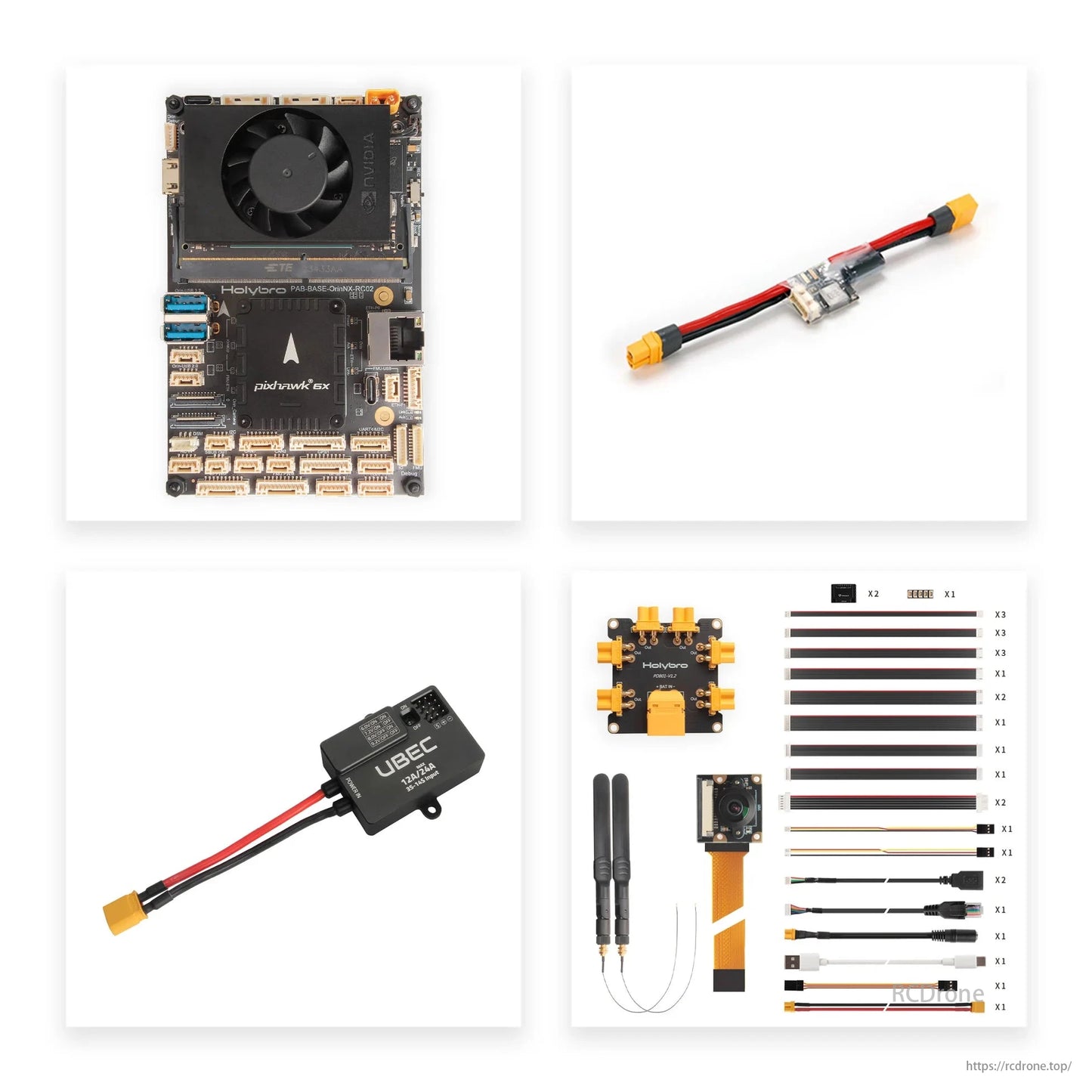
Содержимое упаковки
Комплект Pixhawk 6X
-
Модуль управления полетом Pixhawk 6X (ICM-45686)
-
Pixhawk Jetson Orin плинтус
-
Nvidia Orin NX (16 ГБ ОЗУ) / Orin Nano (4 ГБ ОЗУ) с радиатором и вентилятором
-
SSD-накопитель: Samsung PM9B1 PCIe4.0 NVMe 512 ГБ
-
Модуль Wi-Fi и Bluetooth: Intel 8265NGW Двухдиапазонный AC / Realtek RTL8B22CE
-
Камера: IMX219-200
-
Модуль питания PM02D
-
УБЭК 12А (3-14С)
-
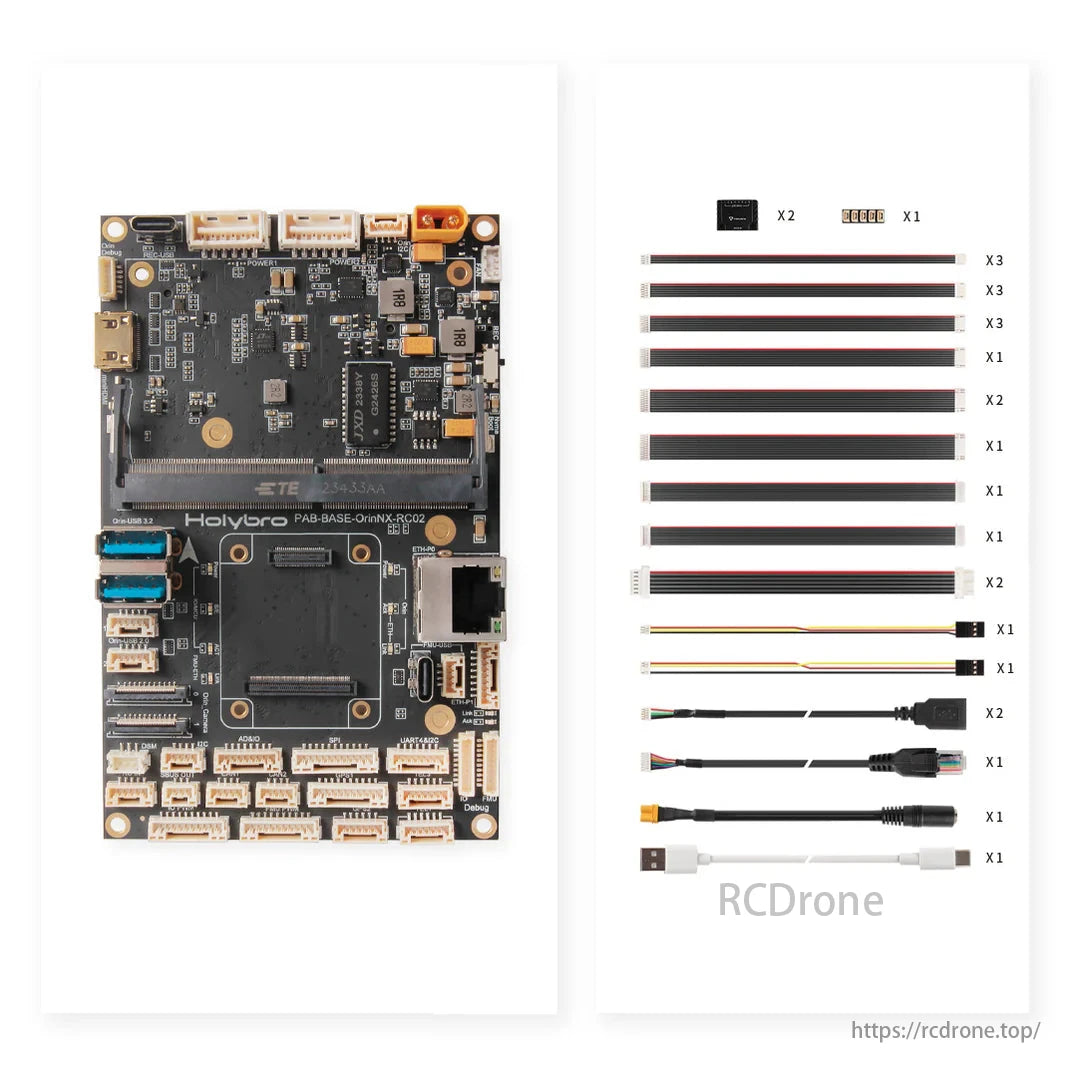
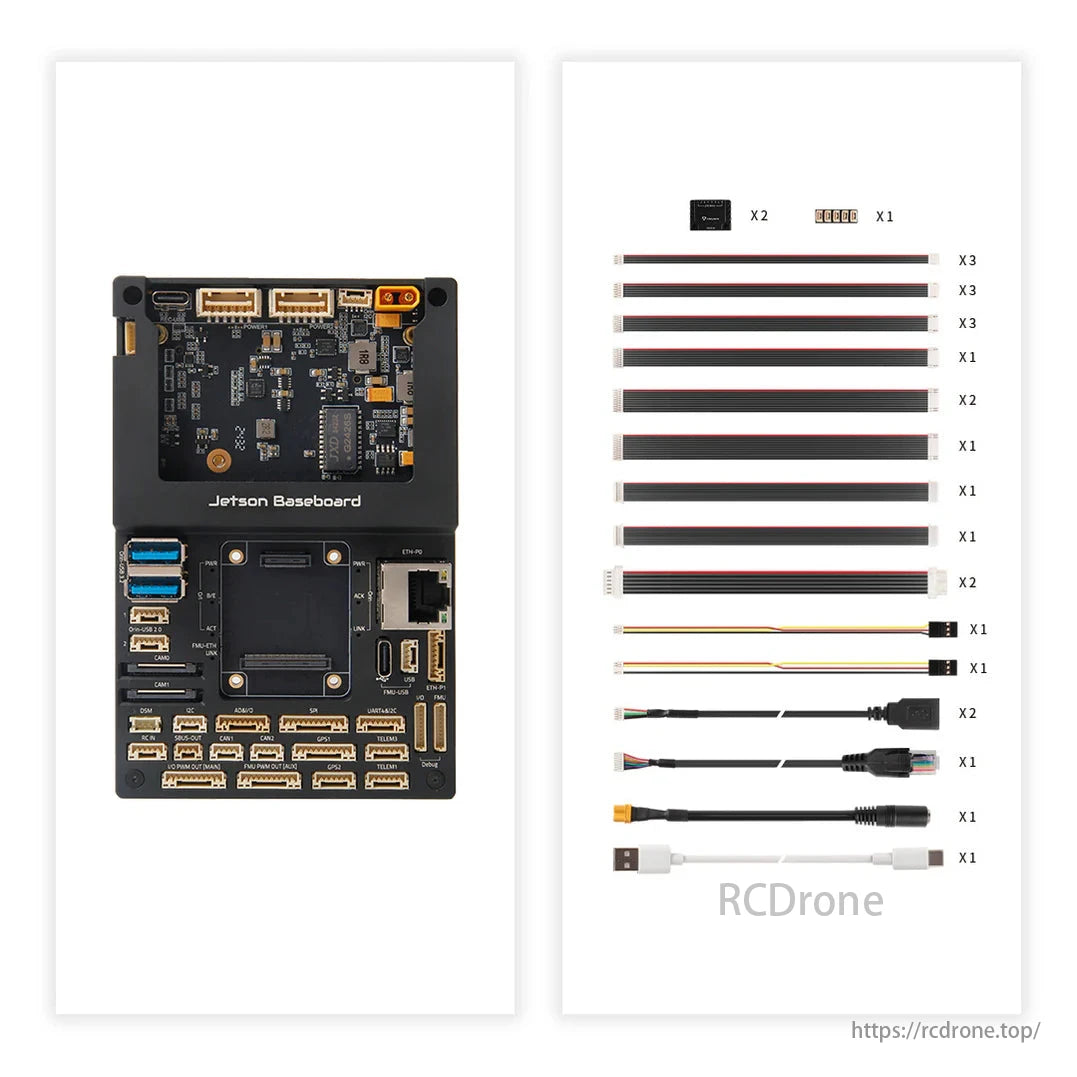
Комплект плат PDB и кабелей
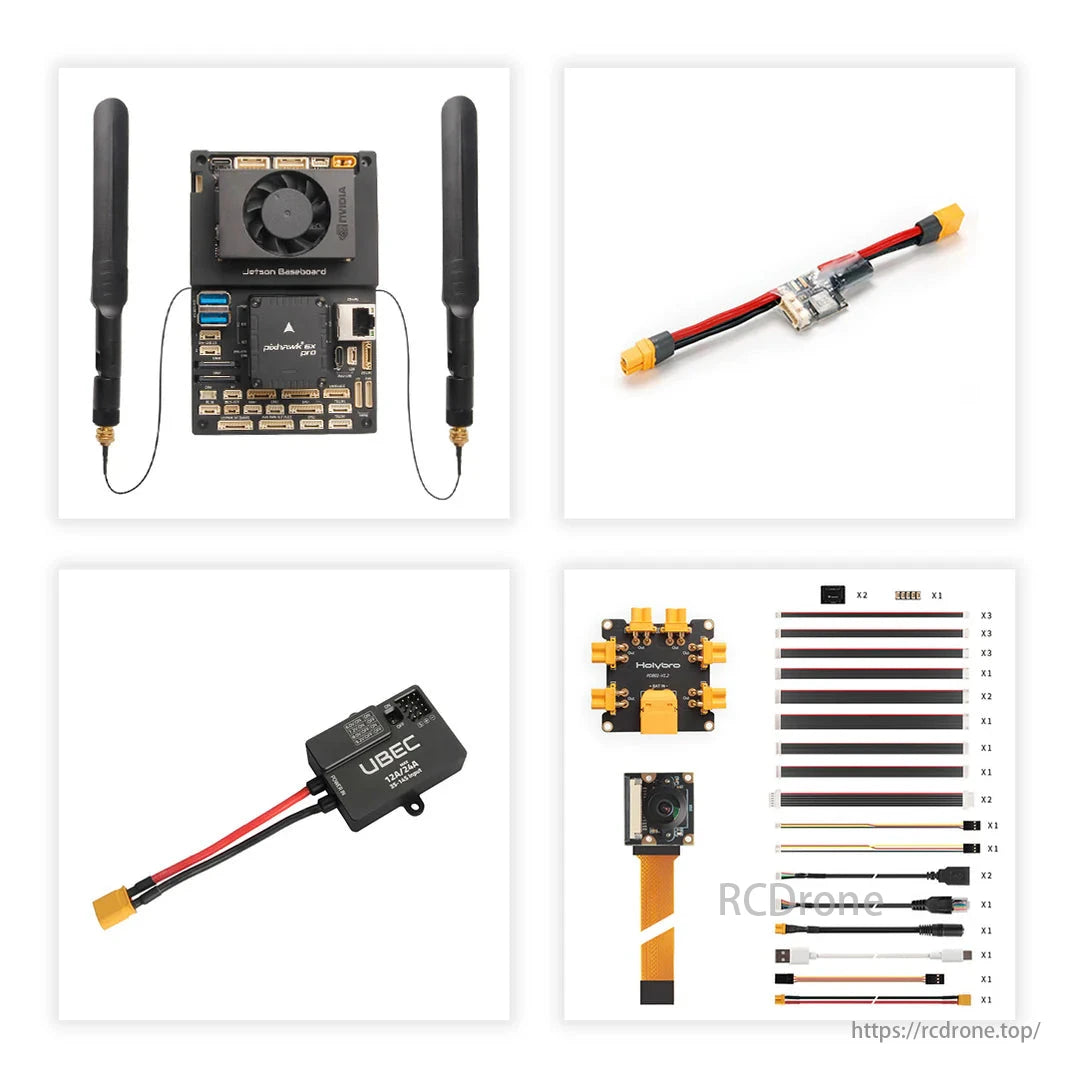
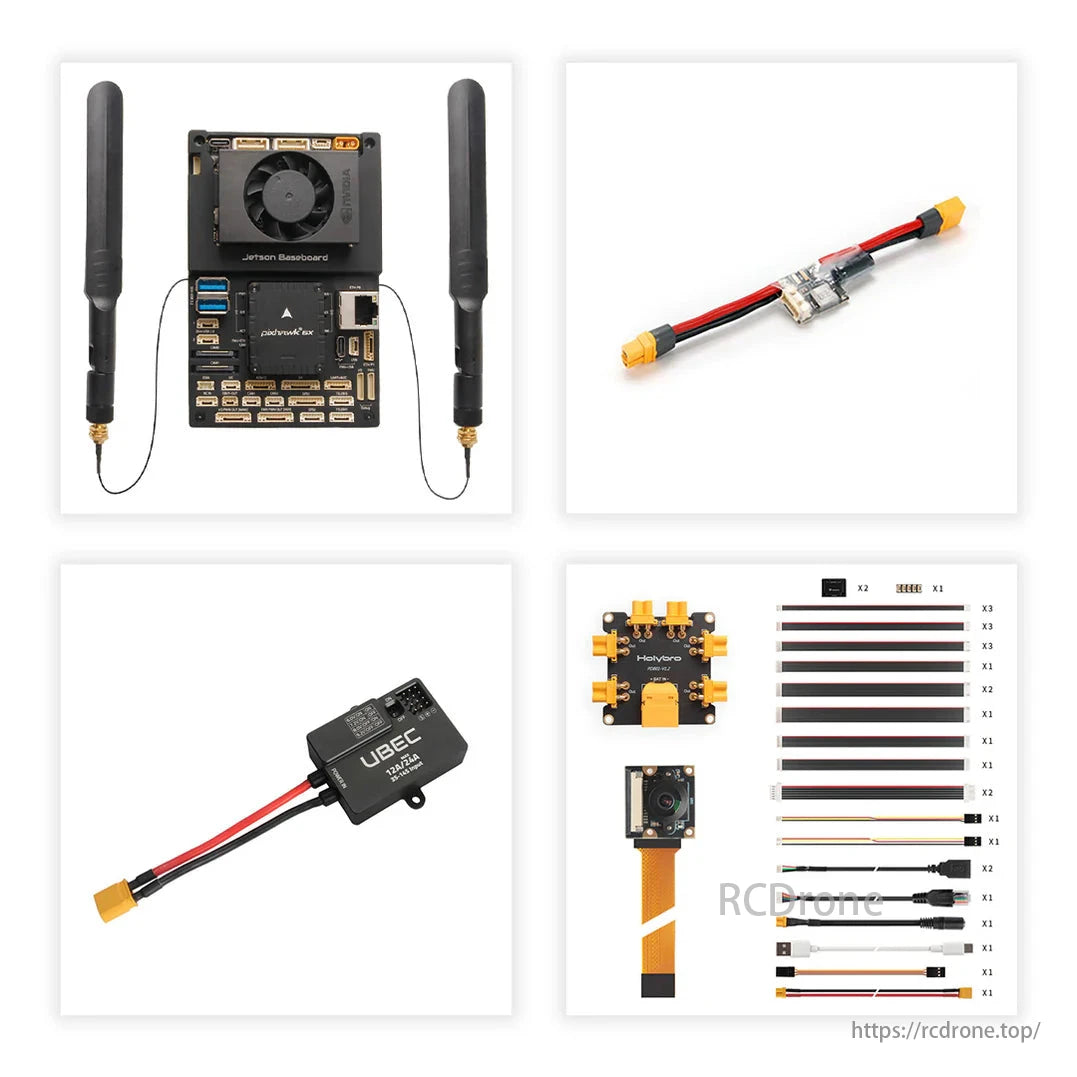
Pixhawk 6X Pro комплект
-
Модуль контроллера полета Pixhawk 6X Pro
-
Плинтус Pixhawk Jetson Orin (с чехлом или без него)
-
Nvidia Orin NX (16 ГБ ОЗУ) / Orin Nano (4 ГБ ОЗУ) с радиатором и вентилятором
-
SSD, модуль Wi-Fi/Bluetooth, камера, модуль питания PM02D, UBEC 12A, плата PDB, комплект кабелей
Только плинтус Jetson
-
Плинтус Pixhawk Jetson Orin (с чехлом или без него)
-
Комплект кабелей
Ссылки для справки
Учетные данные по умолчанию для Jetson Orin:
-
ИДЕНТИФИКАТОР:
святые братья -
Пароль:
123
Подробности




Pixhawk и Nvidia Jetson объединены на одной плате.

Nvidia jetson подключен через UART CAN и коммутатор Ethernet с использованием разъема RJ45 для систем автопилота
Спецификация Pixhawk Autopilot Bus (PAB) с открытым исходным кодом

Система разъемов Jetson SoDIMM полностью совместима с: Jetson Orin NX/Nano

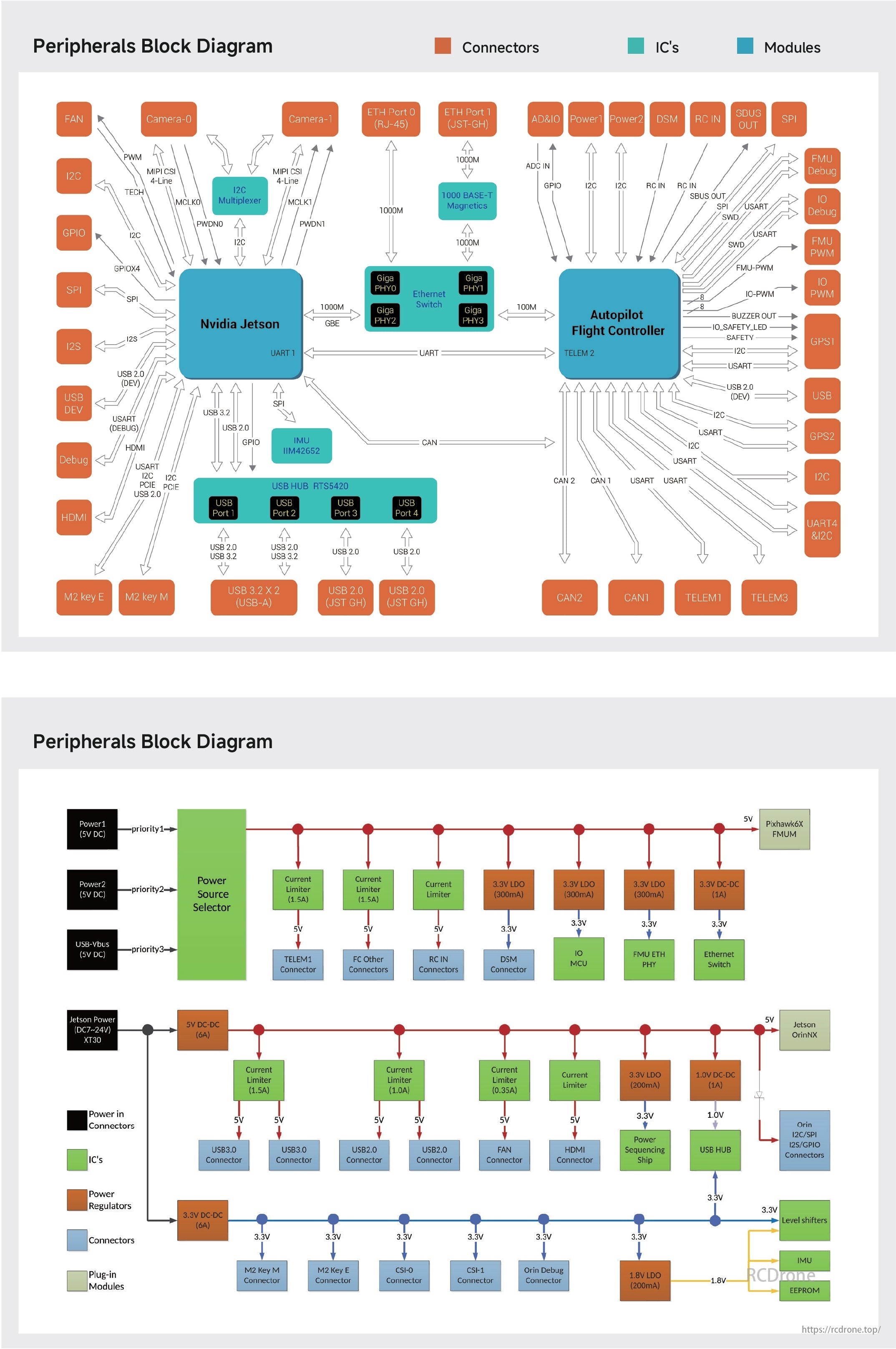
На изображении показана блок-схема периферийных устройств для встроенной системы, включающая такие компоненты, как Nvidia Jetson и Autopilot Flight Controller. Она включает в себя различные разъемы, микросхемы и модули, такие как порты USB, коммутаторы Ethernet и регуляторы мощности, иллюстрирующие их взаимосвязи и поток данных.
Справочная схема электропроводки

Две диаграммы иллюстрируют системы распределения питания для модуля Jetson с использованием одной батареи. Левая диаграмма использует силовой модуль PM02D и плату распределения питания, в то время как правая диаграмма включает внешний UBEC для батарей больше 4S.Обе установки обеспечивают надлежащую регулировку напряжения для Jetson и Pixhawk Power.
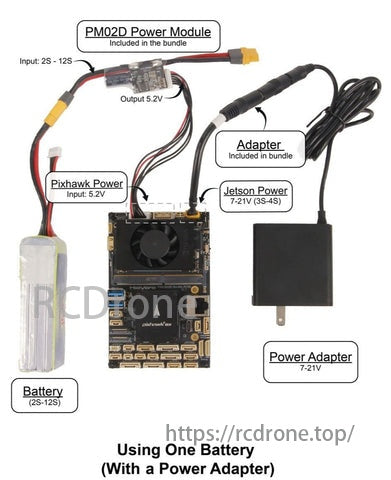
Модуль питания PM02D подключает аккумулятор к Pixhawk и Jetson, используя один аккумулятор с адаптером питания для входного напряжения 7–21 В.