Комплект разработки Holybro X500 v2 PX4 — комплект дрона из углеродного волокна с Holybro Pixhawk 6C / 6X, M8N GPS, телеметрическим радио SiK, промышленным дроном
Комплект разработки Holybro X500 v2 PX4 — комплект дрона из углеродного волокна с Holybro Pixhawk 6C / 6X, M8N GPS, телеметрическим радио SiK, промышленным дроном
HolyBro
Обычная цена
$769.00 USD
Обычная цена
Цена со скидкой
$769.00 USD
Цена за единицу
за
Налоги включены.
Стоимость доставки рассчитывается при оформлении заказа.
Не удалось загрузить сведения о доступности самовывоза
Комплект разработчика PX4 — X500 v2 — доступный, легкий и надежный профессиональный комплект для разработки дронов из углеродного волокна с новейшей версией Holybro Pixhawk 6C или
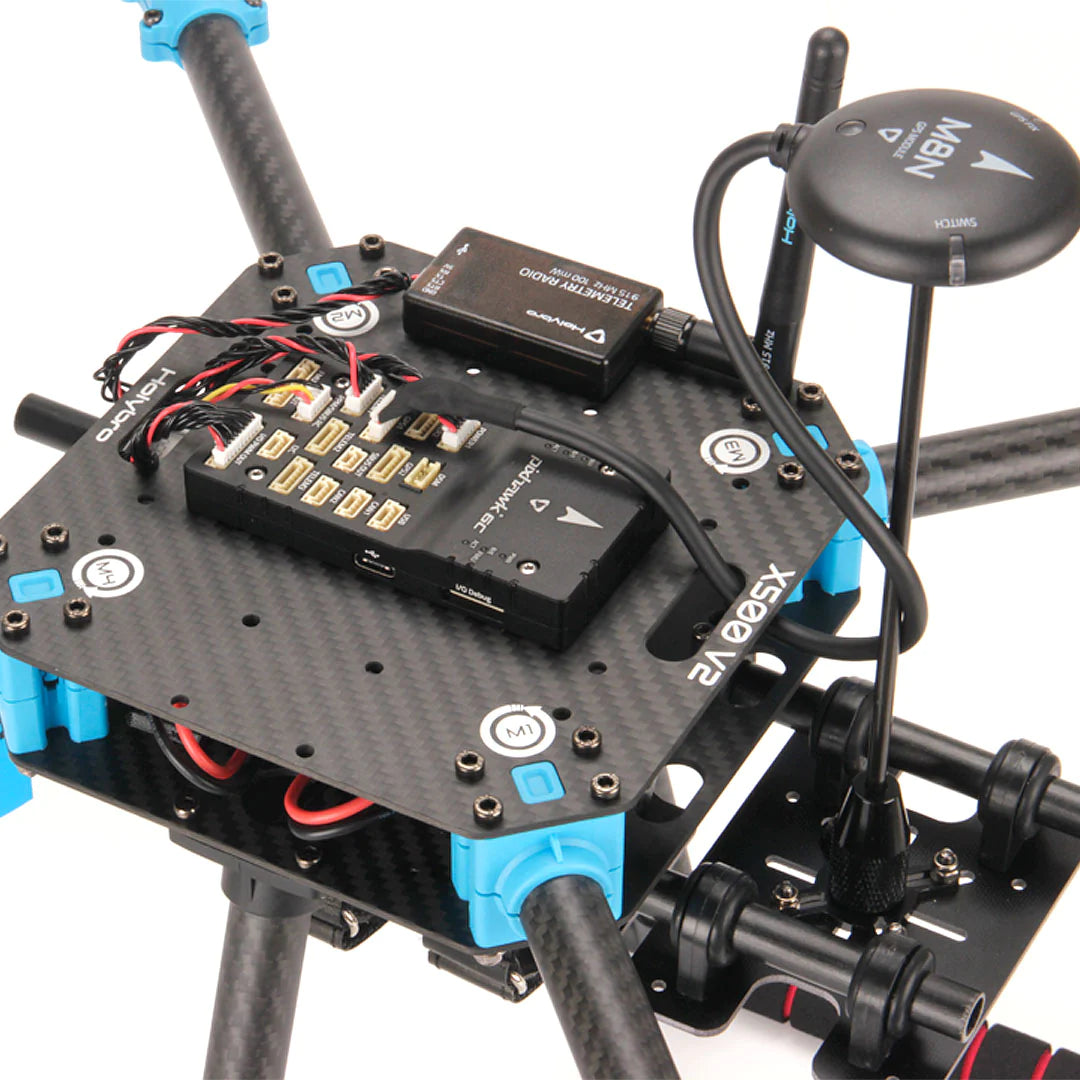
Рама (X500 v2) изготовлена из полностью углеродного твила, с трубчатыми рычагами из углеродного волокна, которые поддерживаются недавно разработанными армированными волокном нейлоновыми соединителями с удобными выемками на как со стороны двигателя, так и со стороны корпуса, что обеспечивает гораздо более простую и понятную установку. Шасси состоит из трубок из углеродного волокна диаметром 16 и 10 мм с утолщенными и усиленными разъемами.
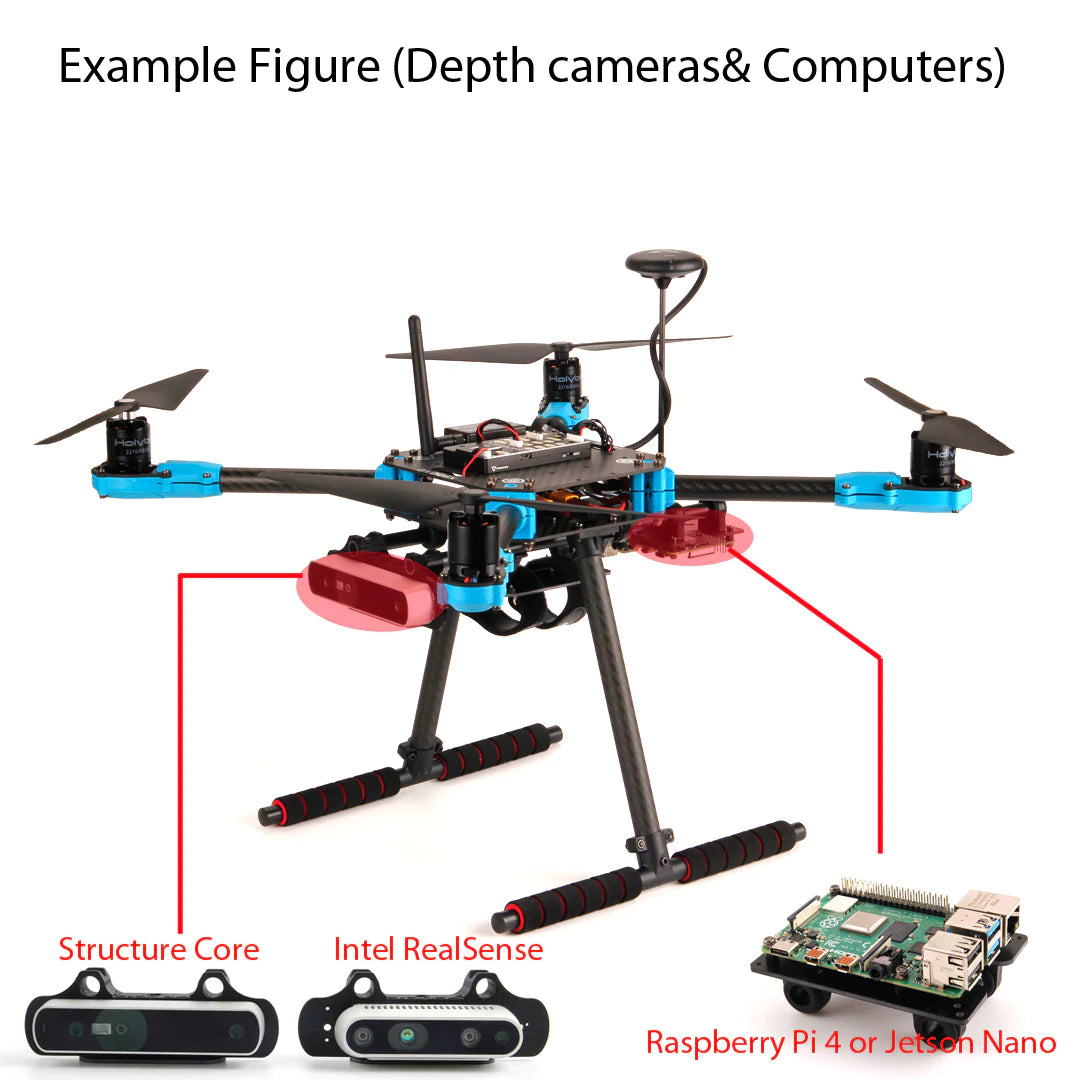
На платформе теперь есть монтажные отверстия для GPS и популярных сопутствующих компьютеров, таких как Raspberry Pi 4 и Jetson Nano. Существует дополнительное крепление для камеры глубины (приобретается отдельно) для различных камер глубины, таких как серии Intel RealSense и камеры глубины Structure Core. Расстояние между верхней и нижней пластинами из углеродного волокна было увеличено для облегчения доступа. Регулируемая монтажная плата аккумулятора была увеличена для поддержки батарей большего размера и увеличения времени полета. Система крепления на рельсах готова к использованию целого ряда креплений для камер и подвесов для различных применений. Все инструменты для установки предоставляются в комплекте.
Примечание: Полетный контроллер Pixhawk 6C совместим как с PX4, так и с Ardupilot, но поставляется с прошивкой автопилота PX4 с открытым исходным кодом.
Функция:
- Совершенно новый Pixhawk 6C или Pixhawk 6X Контроллер полета с M10 GPS-модулем и Plug & Play SiK телеметрической радиостанцией
- Новая конструкция рамы с минимальным временем сборки (~30 минут), пайка не требуется
- Рамка из углеродного волокна с разъемами из армированного волокном нейлона, обеспечивающая легкую и простую установку
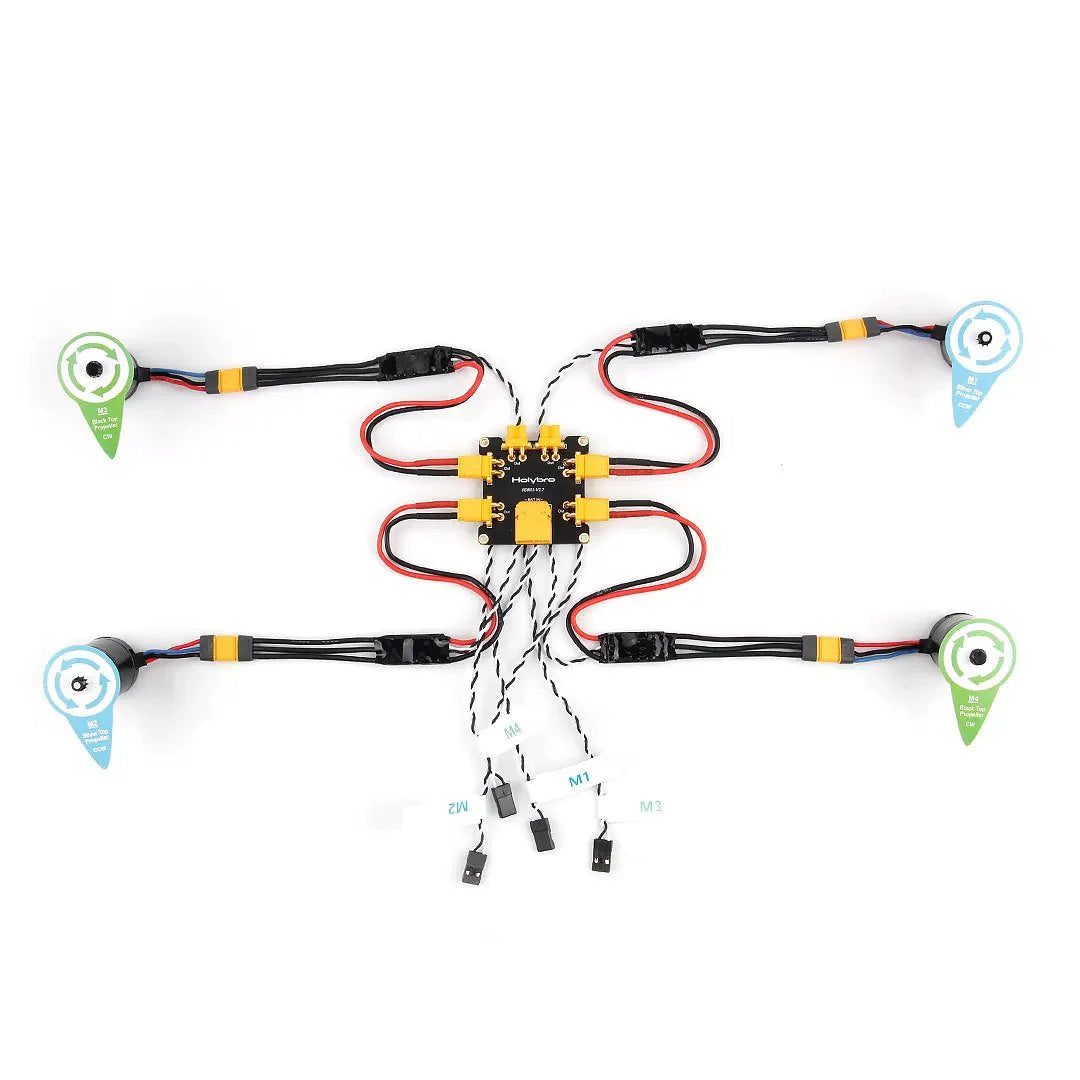
- Предварительно установленные двигатели и регуляторы скорости с простыми вилками питания XT30 для PDB
- Плата распределения питания (PDB) с вилками XT60 и XT30
- Крепление для сопутствующего компьютера, например Raspberry Pi и Nvidia Jetson Nano
- Дополнительное крепление камеры глубины для Intel RealSense и Structure Core
Примечание:
- Версия Pixhawk 6X теперь поставляется с версией PM02D-HV (высокое напряжение). В PX4 вы должны установить SENS_EN_INA228 , чтобы включить это. Эта версия HV поддерживается только в ardupilot 4.4 и более поздних версиях. Руководство по установке можно найти здесь.
-
Поддержка прошивки для GPS M10: Требуются PX4 1.14 и ArduPilot 4.3 или новее.
Комплект разработчика PX4 — X500 v2 включает:
- Полетный контроллер автопилота: Pixhawk 6C (пластмассовый корпус) и PM02 V3 или Pixhawk 6X (стандартная база) и PM02D
- GPS модуль M10
- Радио телеметрии SiK V3 433/915 МГц
- Комплект рамы X500 V2 (SKU30120)
-
Предустановленные элементы:
- Двигатели — двигатель Holybro 2216 KV920 (4 шт.) со штекером XT30 (технические характеристики двигателя можно найти здесь)
- ESC — BLHeli S ESC 20A (4 шт.) с вилками XT30 — совместимы с батареей 4S
- 1045 пропеллеров (6 шт.)
- Плата распределения питания (разъем XT60 для аккумулятора и разъем XT30 для регуляторов скорости и периферийных устройств)
-
Другие дополнительные элементы (продаются отдельно)
- Пульт дистанционного управления RadioMaster TX16S
- Приемник RadioMaster R81
- Крепление камеры глубины
Детали комплекта рамы X500 V2 (SKU30120):
- Кузов — верхняя и нижняя пластины полностью из углеродного волокна (144 x 144 мм, толщина 2 мм)
- Рычаг — высокопрочные и сверхлегкие 16-миллиметровые трубки из углеродного волокна с новыми коннекторами из армированного волокном нейлона
- Шасси — трубы из углеродного волокна диаметром 16 и 10 мм с усиленными и улучшенными пластиковыми тройниками.
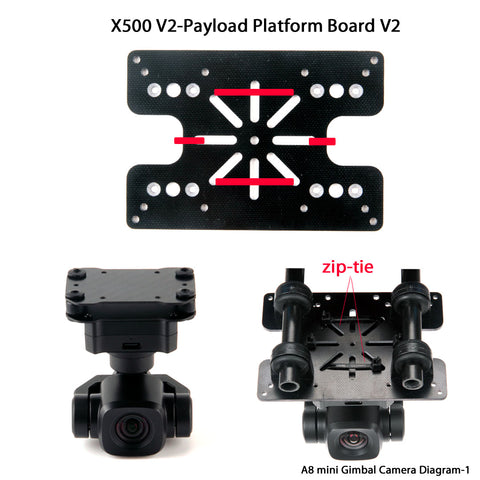
- Платформа — с монтажными отверстиями для GPS и популярных сопутствующих компьютеров, таких как Raspberry Pi 4 и Jetson Nano
- Двойная система крепления стержня Ø 10 мм и рейки длиной 250 мм
- Крепление для аккумулятора с двумя ремнями для аккумулятора
- Ручные инструменты для установки
Механические характеристики:
- Колесная база: 500 мм
- Шаблон крепления двигателя: 16x16 мм
- Корпус рамы: 144x144 мм, толщина 2 мм
- Высота шасси: 215 мм
- Пространство между верхней и нижней пластинами: 28 мм
- Вес: 610 г
- Время полета: ~18 минут висения без дополнительной полезной нагрузки. Протестировано с аккумулятором емкостью 5000 мАч.
- Полезная нагрузка: 1500 г (без аккумулятора, дроссельная заслонка 70%)
- Рекомендуемый аккумулятор: 4S 3000–5000 мАч 20C+ с аккумулятором XT60 Lipo (не входит в комплект)

Руководство по сборке X500 v2
Ссылка:
Спецификация двигателя
3D-печать:
Holybro_X500_V2_3D ПечатьРуководство по установке:
Идоробототехника Артикул
Руководство по установке PX4
Руководство по настройке Ardupilot
Несколько советов:
Related Collections