


Манипулятор Inspire Robots RH56DFTP – 6 СО, 30Н захват, тактильные & датчики силы, управление ModbusTCP+CAN
Манипулятор Inspire Robots RH56DFTP – 6 СО, 30Н захват, тактильные & датчики силы, управление ModbusTCP+CAN
Inspire Robots
Не удалось загрузить сведения о доступности самовывоза
Обзор
Интеллектуальная бионическая рука Inspire Robots RH56DFTP — это высокоточная, пятипалубная ловкая рука, разработанная для передовых робототехнических приложений. Она обладает 6 степенями свободы, 12 суставами и сочетанием 6 датчиков силы и 17 тактильных датчиков, что обеспечивает человекообразную ловкость и тактильное восприятие. С силой на кончике пальца 30N (≈3 кг на палец), высокой скоростью углового движения и бесшовной ModbusTCP+CAN (RS485) связью, эта рука идеально подходит для исследований, промышленной автоматизации и бионической робототехники.
Ключевые особенности
-
Человекообразная тактильная точность: Интегрированные тактильные датчики обеспечивают восприятие в реальном времени для точного манипулирования объектами.
-
Сильный и стабильный захват: Каждый палец обеспечивает до 3 кг силы привода, что позволяет надежно захватывать различные объекты.
-
Автозамок при потере питания: Сохраняет положение при отключении питания, устраняя необходимость в повторной нулевой настройке при запуске.
-
Высокоскоростная работа: Движение большим пальцем превышает 130°/с, в то время как движение четырьмя пальцами достигает 200°/с для отзывчивого управления.
-
Долговечный и надежный: Создан для длительного использования в исследовательских лабораториях, робототехнических платформах и промышленных условиях.
Характеристики
| Параметр | Значение |
|---|---|
| Модель | RH56DFTP-0R, RH56DFTP-0L |
| Степени свободы | 6 |
| Количество суставов | 12 |
| Датчики силы | 6 |
| Тактильные датчики | 17 |
| Управляющий интерфейс | ModbusTCP + CAN (RS485) |
| Рабочее напряжение | DC 24V ±10% |
| Статический ток | 0.2A |
| Пиковый ток | 4A |
| Повторяемость | ±0.2мм |
| Вес | 790г ±10г |
| Максимальная сила нажатия кончика пальца | 30Н (≈3 кг) |
| Диапазон бокового вращения большого пальца | >85° |
| Угловая скорость – большой палец | >130°/с |
| Угловая скорость – четыре пальца | >200°/с |
Применения
-
Научные исследования и разработки: Исследования в области передовой робототехники в университетах и лабораториях.
-
Промышленная автоматизация: Задачи высокоточной сборки и обработки.
-
Бионические решения: Исследования протезов рук и гуманоидной робототехники.
-
Искусственный интеллект и машинное обучение: Проекты тактильного восприятия и манипуляции, требующие точной обратной связи в реальном времени.
Основные характеристики
RH56DFTP превосходно справляется с задачами, требующими точного контроля силы и деликатных операций, таких как сбор черники, черри или винограда без повреждений. Он также справляется с высокими силами захвата для надежных промышленных приложений, что делает его универсальным решением для сложных манипуляционных задач.
Подробности
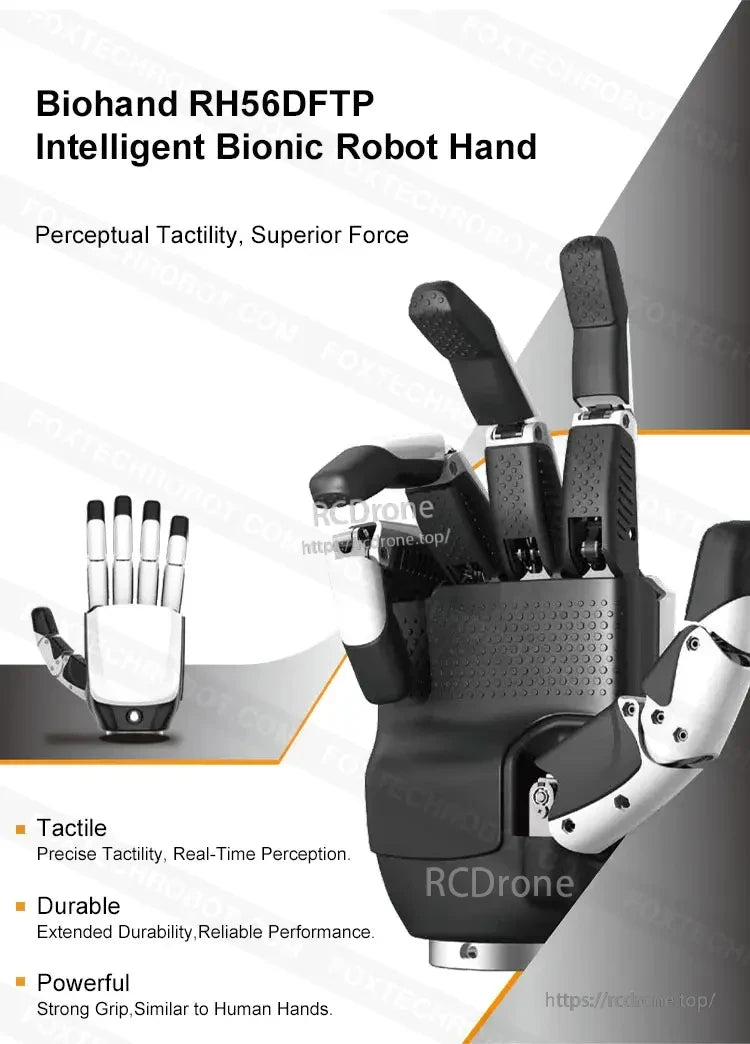
Интеллектуальная бионическая рука Biohand RHS6DFTP предлагает воспринимаемую тактильность, превосходную силу и точную тактильность в реальном времени, с долговечностью для надежной работы и мощным захватом, аналогичным человеческим рукам.

Роботизированная рука с шестью степенями свободы, разработанная для точности и ловкости, идеально подходит для различных приложений, таких как хирургия, сборка или лабораторные работы.

Мощный захват, производительность, подобная человеческой. Сила активации 3 кг на палец.Ловкая роботизированная рука с продвинутым дизайном и точной инженерией.


Механизм самозапирания при потере мощности удерживает позицию стабильно и надежно без необходимости повторной нуляции при запуске или отключении.


Многофункциональный инструмент с датчиком силы, подходящий для сбора и зажима мелких фруктов, таких как черника, черри и виноград.

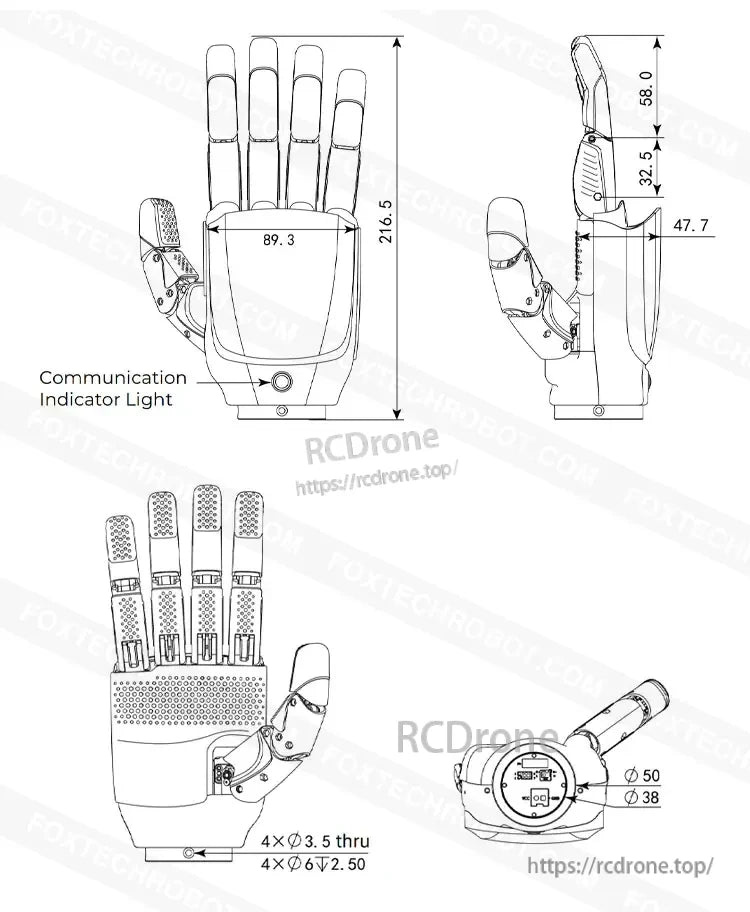
Индикатор связи, 8 x 47.7 мм, 89 мм в длину, без светодиода, 5x5: 38-4x03.5 до 4xp6v2, 50 Ом, 2 слоя
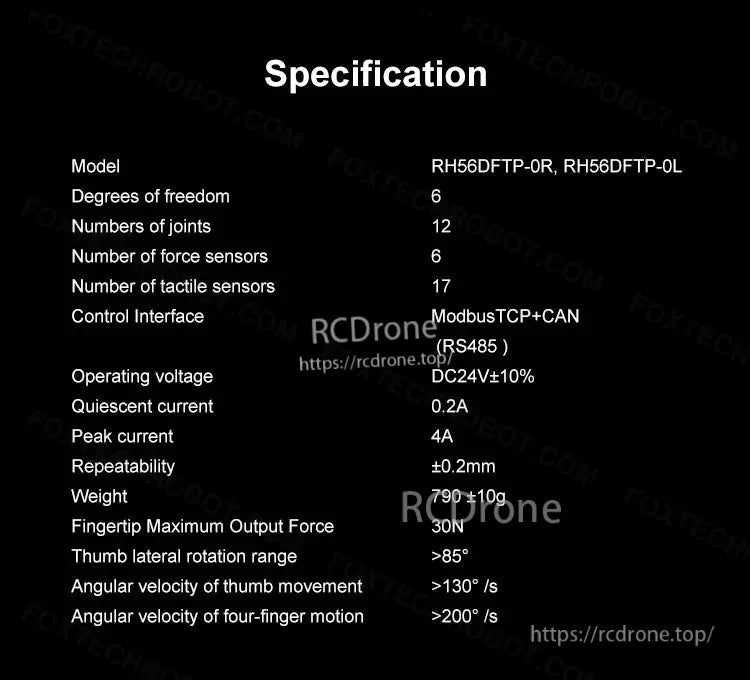
Модель спецификации RHS6DFTP-OR и RHS6DFTP-OL имеет 3 степени свободы, 12 суставов и 17 датчиков силы и тактильных датчиков. Она использует интерфейс управления Modbus TCP+CAN (RS485) с рабочим напряжением DC24V +10%.



Related Collections


