













LINKERBOT Linker Hand L10 Роботизированная рука, 10 степеней свободы, управление CAN/RS485, червячная передача, усилие захвата 80Н, DC24V+/-10%
LINKERBOT Linker Hand L10 Роботизированная рука, 10 степеней свободы, управление CAN/RS485, червячная передача, усилие захвата 80Н, DC24V+/-10%
LINKERBOT
Не удалось загрузить сведения о доступности самовывоза
Обзор
LINKERBOT Linker Hand L10 - это роботизированная рука, разработанная для ловкой манипуляции и точного управления. Она имеет 10 степеней свободы с червячной передачей и взаимодействует через CAN/RS485 для надежной интеграции в исследовательские и промышленные системы.
Ключевые особенности
- 10 DoF ловкая рука с червячной передачей для стабильного привода.
- Интерфейсы управления: CAN и RS485.
- Точность повторного позиционирования < +/-0.2mm; типичное время открытия/закрытия 1.2s.
- Способность к силе: максимальная сила на кончике большого пальца 15N, максимальная сила на кончиках четырех пальцев 15N, максимальная сила захвата пятью пальцами 80N.
- Режимы управления и утилиты из руководства пользователя: управление положением, управление скоростью, тактильная обратная связь (управление силой) через сенсоры на кончиках пальцев и онлайн-обновление прошивки.
- Экосистема (по материалам продукта): поддерживаемые роботизированные руки UR, Franka, XArm, RealMan, AgileX; поддерживаемые симуляторы Pybullet, Isaac, MuJoCo; примеры использования включают ROS1, ROS2, Python, C++; методы сбора данных включают телеприсутствие с помощью перчаток, экзоскелетные перчатки, перчатки с жидким металлом, зрение и VR (Meta Quest 3).
Для предварительных продаж или поддержки интеграции свяжитесь с [email protected] or посетите https://rcdrone.top/.
Спецификации
| Степени свободы (DoF) | 10 |
| Количество суставов | 20 (10 активных + 10 пассивных) |
| Режим передачи | Передача с червячным редуктором |
| Управляющий интерфейс | CAN/RS485 |
| Вес | 800г |
| Максимальная нагрузка | 25кг |
| Рабочее напряжение | DC24V+/-10% |
| Статический ток | 0.2A |
| Средний ток (движение без нагрузки) | 0.5A |
| Максимальный ток | 3A |
| Точность повторного позиционирования | < +/-0.2mm |
| Время открытия/закрытия | 1.2s |
| Максимальная сила на кончике большого пальца | 15N |
| Максимальная сила на кончиках четырех пальцев | 15N |
| Максимальная сила захвата пятью пальцами | 80N |
Датчик давления
| Пьезорезистивный массив | 6*12 |
| Площадь нагрузки датчика | 9.6*14.4мм |
| Сила срабатывания | 5г |
| Диапазон измерений | 20Н |
| Срок службы | 100,000 циклов |
| Частота передачи данных | 200FPS |
Емкостный датчик (по желанию)
| Частота выборки | >=50Гц |
| Диапазон измерений | 0-30Н |
| Предельная нагрузка | 60Н |
| Чувствительность к давлению | 0.1Н |
| Разрешение измерений | 0.5%FS |
| Точность измерений | 2%FS |
| Разрешение давления | 0.25N |
| Разрешение направления | 45° |
| Дистанция обнаружения | 1 см (металл, человеческое тело) |
Что включено
- USB-to-CAN отладочный кабель x1
- Соединительный кабель XT30 (2+2) x1
- Блок питания x1
- Электрический кабель x1
- Linker Hand L10 x1
Применения
- Исследования и образование в области ловкой манипуляции с использованием ROS1/ROS2 и симуляторов (Pybullet, Isaac, MuJoCo).
- Телеприсутствие через перчатки, экзоскелетные перчатки, перчатки с жидким металлом, зрение и VR (Meta Quest 3).
- Точная сборка, операции на основе пути, затяжка винтов, захват тонких листов и общее обращение с объектами.
Руководства
Linker_Hand_L10_Product_Manual.pdf
Детали

Linker Hand L10 предлагает 10 степеней свободы, точное движение через механизм соединений и индивидуальные драйверы моторов. Поддерживает UR, Franka, ROS, Python, VR, Pybullet, CAN и многое другое для универсальной интеграции и управления роботами.
Linker Hand L10 обеспечивает высокую ловкость, каждый палец предлагает 4 степени свободы для точных операций. Его многосенсорная система, оснащенная камерами и электронным кожей, обеспечивает всестороннее восприятие окружающей среды и адаптивное взаимодействие. Благодаря интеграции с облаком, пользователи могут быстро развернуть руку через облачный сервис библиотеки навыков без кода, что позволяет эффективно настраивать устройство, снижая операционную сложность. Эти возможности поддерживают широкий спектр сложных приложений, повышая как точность, так и удобство использования без необходимости в обширном программировании или настройке.

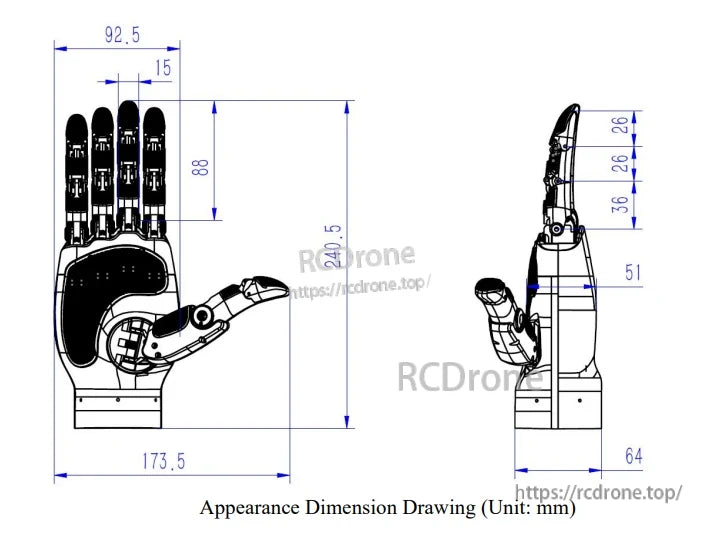
Размеры роботизированной руки в миллиметрах, показывающие фронтальный и боковой виды с точными измерениями для проектирования и сборки.
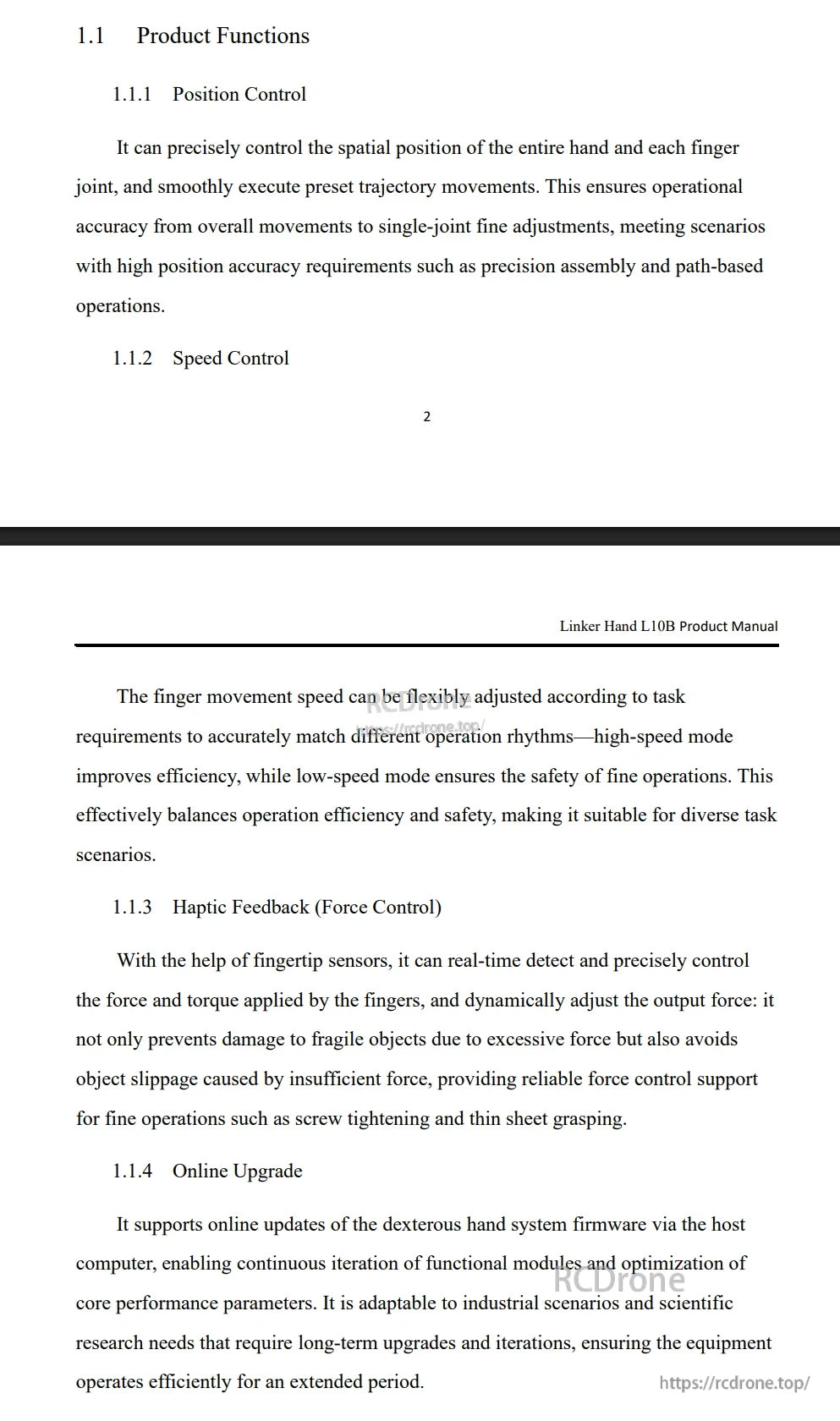
Linker Hand L10B предлагает точное управление положением и скоростью, тактильную обратную связь для управления силой и онлайн-обновления прошивки. Разработан для точности, безопасности и адаптивности в промышленных и исследовательских приложениях, требующих тонкой манипуляции и долгосрочной производительности.
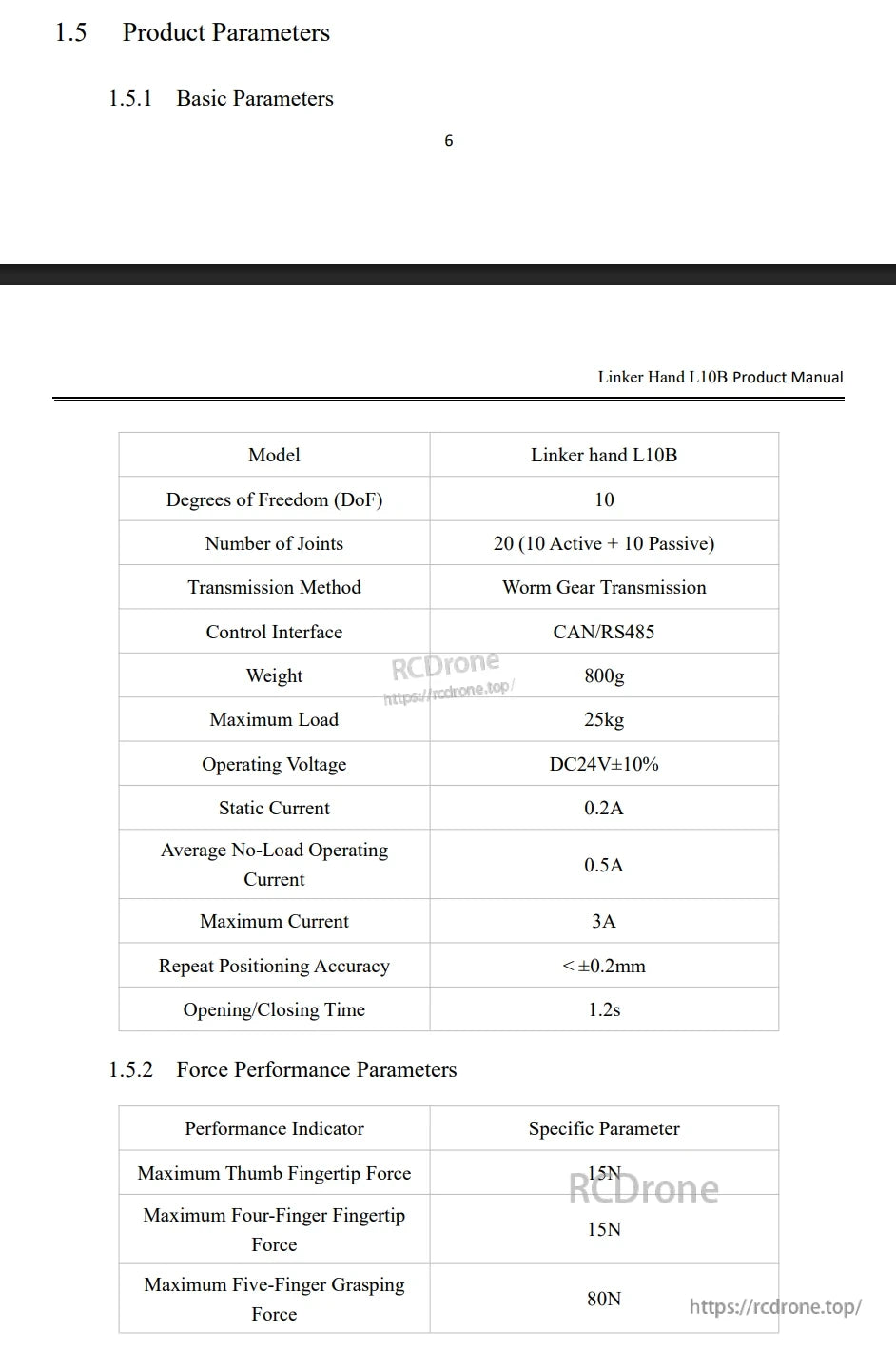
Linker Hand L10B предлагает 10 степеней свободы, 20 суставов, червячную передачу и управление CAN/RS485. Весит 800 г, выдерживает до 25 кг при DC24V, обеспечивая точное позиционирование и захватные силы до 80N.

Оснащен пьезорезистивным массивом 6x12 (диапазон 20N, 100k циклов). Дополнительный емкостный датчик: ≥50Hz выборка, диапазон 0–30N, разрешение направления 45°, обнаруживает металл или человеческое тело на расстоянии 1 см.
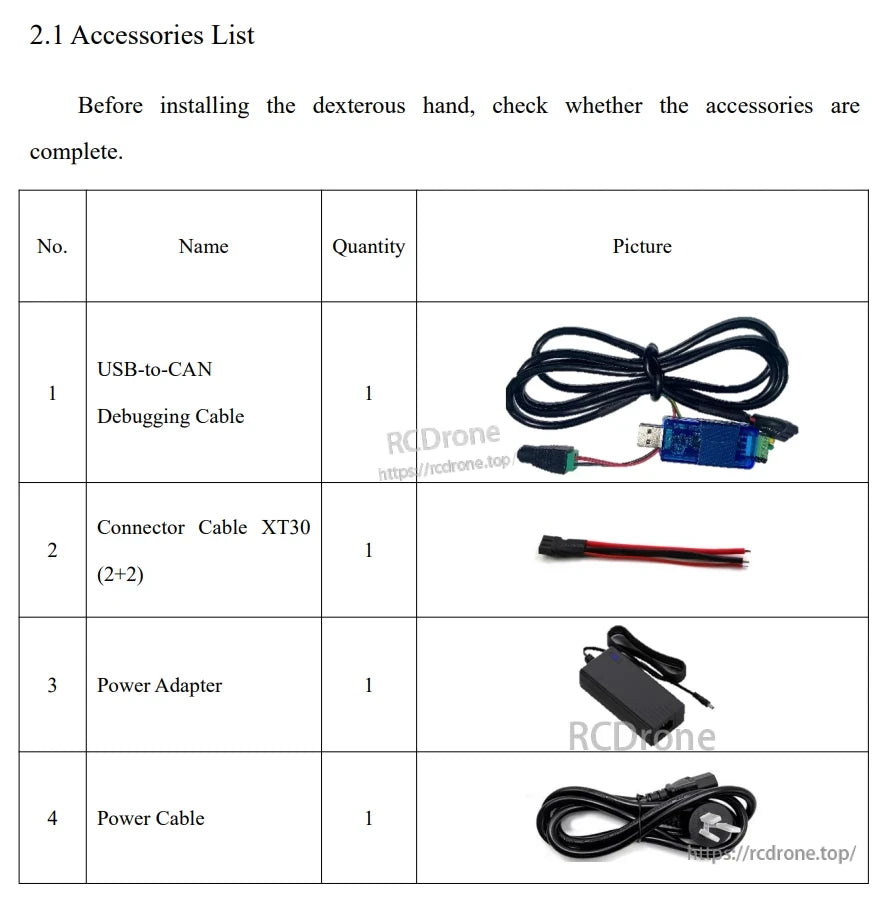
Список аксессуаров для установки ловкой руки: USB-to-CAN кабель, разъем XT30, адаптер питания и силовой кабель, по одному экземпляру каждого.
Related Collections













