







LINKERBOT Linker Hand L6 Роботизированная рука, 6 степеней свободы, CAN, привод с тягами, усилие захвата 50Н, повторяемость ±0,2 мм
LINKERBOT Linker Hand L6 Роботизированная рука, 6 степеней свободы, CAN, привод с тягами, усилие захвата 50Н, повторяемость ±0,2 мм
LINKERBOT
Не удалось загрузить сведения о доступности самовывоза
Обзор
LINKERBOT Linker Hand L6 - это ловкая роботизированная рука, предназначенная для точной манипуляции. Она имеет 6 степеней свободы (DoF) и 11 суставов (6 активных + 5 пассивных) с трансмиссией на основе звеньев и интерфейсом управления CAN. Структура, показанная на изображениях продукта, подчеркивает полностью металлические пальцы, износостойкий силикон на кончиках пальцев, тактильные датчики давления на пяти пальцах, индикаторные огни, резиновую подушку против защемления на половине ладони и высокоточный электрический цилиндр прямого привода.
Ключевые особенности
- 6 DoF ловкая манипуляция; 11 суставов (6 активных + 5 пассивных).
- Трансмиссия на основе звеньев с управлением по шине CAN.
- Точность повторного позиционирования: ±0,2 мм.
- Сила воздействия: максимальная сила на кончике большого пальца 10N; максимальная сила на кончике четырех пальцев 8N; максимальная сила захвата пятью пальцами 50N.
- Пьезорезистивный массив тактильных сенсоров с пятью пальцами для измерения контакта/давления.
- Элементы дизайна: полностью металлические пальцы, износостойкие силиконовые наконечники, индикаторный свет, резиновая подушка против защемления.
- Компактная &и маневренная компоновка; многосенсорная система (включая камеры и электронную кожу) и интеграция устройства с облаком, как показано на изображениях продукта.
Для продаж и технической поддержки свяжитесь с [email protected] or или посетите https://rcdrone.top/.
Спецификации
| Параметр | Значение |
|---|---|
| Степени свободы (DoF) | 6 |
| Количество суставов | 11 (6 активных + 5 пассивных) |
| Режим передачи | Передача через соединения |
| Интерфейс управления | CAN |
| Вес | 623.5г |
| Максимальная нагрузка | 28кг |
| Рабочее напряжение | DC24V±10% |
| Статический ток | 0.2A |
| Средний ток (движение без нагрузки) | 0.75A |
| Максимальный ток | 1.4A |
| Точность повторного позиционирования | ±0.2мм |
| Максимальная сила на кончике большого пальца | 10Н |
| Максимальная сила на кончике четырех пальцев | 8Н |
| Максимальная сила захвата пяти пальцев | 50Н |
Производительность движения
| Движущая часть | Угол диапазона (°) | Скорость движения (°/с) |
|---|---|---|
| Основание большого пальца | 57 | 152.82 |
| Основание указательного пальца | 72.30 | 213.27 |
| Основание среднего пальца | 72.90 | 208.29 |
| Основание безымянного пальца | 73.10 | 202.49 |
| Основание мизинца | 72.60 | 201.11 |
| Кончик большого пальца | 69.90 | 192.84 |
| Кончик указательного пальца | 64.60 | 192.84 |
| Кончик среднего пальца | 65.10 | 185.32 |
| Кончик безымянного пальца | 66.90 | 185.32 |
| Кончик мизинца | 66.70 | 184.76 |
| Боковой поворот большого пальца | 80 | 235.29 |
| Время открытия и закрытия | - | 0.35s |
Датчики
| Параметр | Спецификация |
|---|---|
| Пьезорезистивный массив | 6*12 |
| Площадь нагрузки датчика | 9.6*14.4мм |
| Сила срабатывания | 5г |
| Диапазон измерений | 20Н |
| Срок службы | 100,000 циклов |
| Частота передачи данных | 200FPS |
| Диапазон значений | 0~4095 |
Габаритные размеры
| Определение | Параметр (мм) |
|---|---|
| Длина от кончика среднего пальца до основания ладони | 190.7 |
| Максимальная ширина ладони | 121 |
| Длина от кончика большого пальца до основания ладони | 134.3 |
| Высота запястья | 9.5 |
| Диаметр запястья | 60 |
Что включено
- USB‑to‑CAN отладочный кабель x1
- Соединительный кабель XT30 (2+2) x1
- Блок питания x1
- Сетевой кабель x1
- Linker Hand L6 x1
Применения
- Точное захватывание и обработка объектов
- Захват и манипуляция инструментами
- Задачи по перемещению компонентов
Руководства
Руководство пользователя Linker Hand L6 (PDF)
Детали


Высокопроизводительная ловкая роботизированная рука с 6 степенями свободы. Обладает компактной маневренностью, многосенсорной системой и интеграцией с облаком для точного управления, адаптации к окружающей среде и настройки без кода через библиотеку облачных навыков.



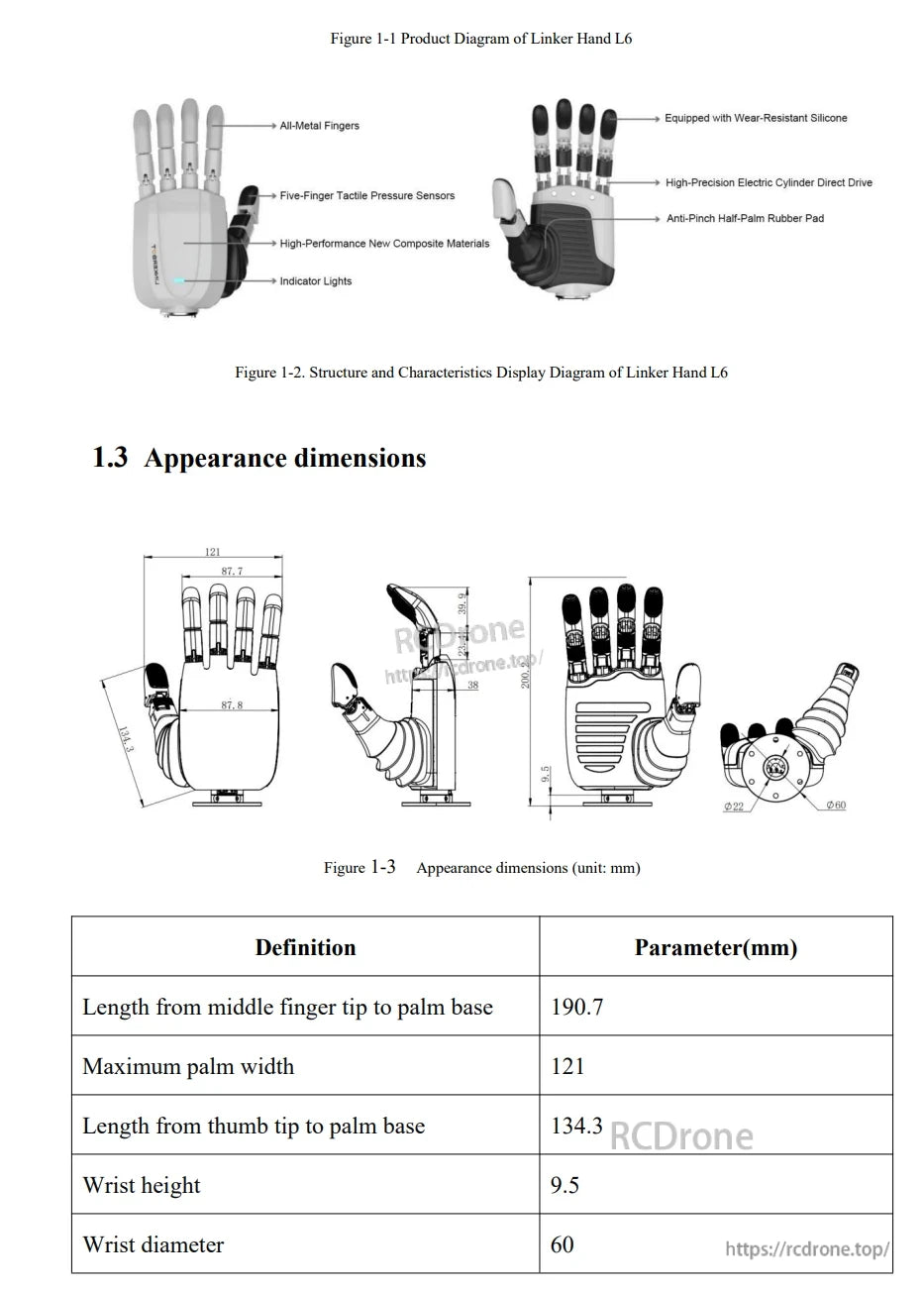
Linker Hand L6 имеет полностью металлические пальцы, тактильные датчики, износостойкий силикон, электрический цилиндрический привод и резиновую накладку против зажатия. Длина пальца: 190.7 мм; ширина ладони: 121 мм; диаметр запястья: 60 мм.
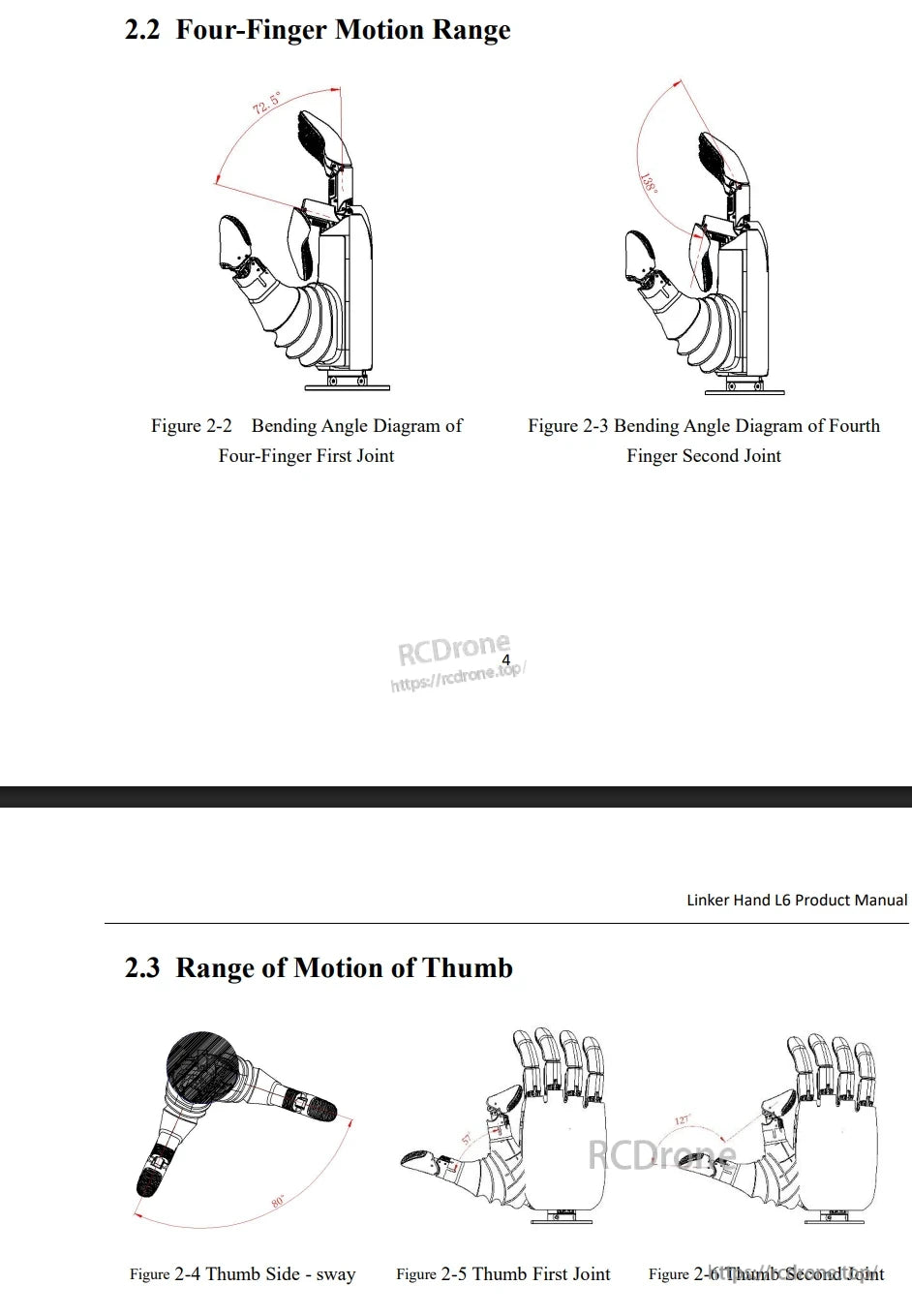
Диапазоны движения суставов пальцев и большого пальца: первый сустав четырехпальцевого 72.5°, второй сустав 138°; боковое движение большого пальца 80°, первый сустав 57°, второй сустав 127°.
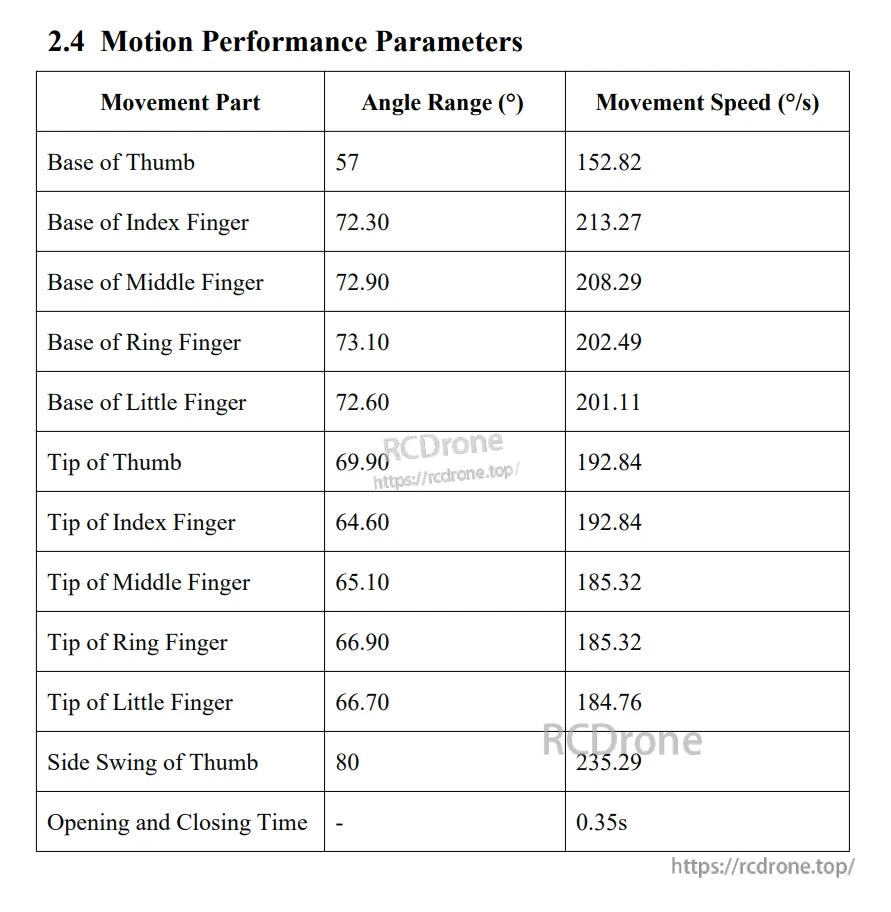
Параметры движения пальцев роботизированной руки: колебание большого пальца на 235.29°/с, открытие/закрытие за 0.35 секунды — демонстрация точной артикуляции с детализированными диапазонами углов суставов и скоростей.
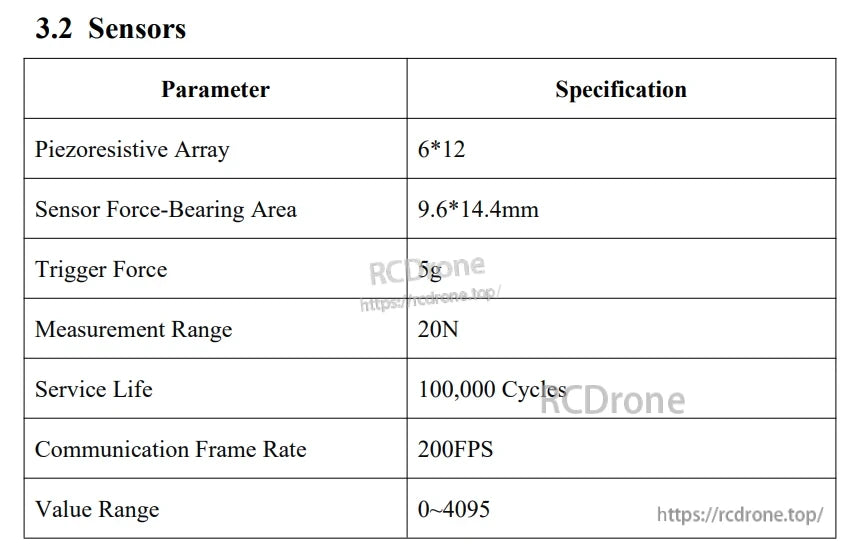
Технические характеристики датчиков: массив 6x12, площадь 9.6x14.4 мм, триггер 5g, диапазон 20N, 100k циклов, 200FPS, диапазон значений 0-4095.
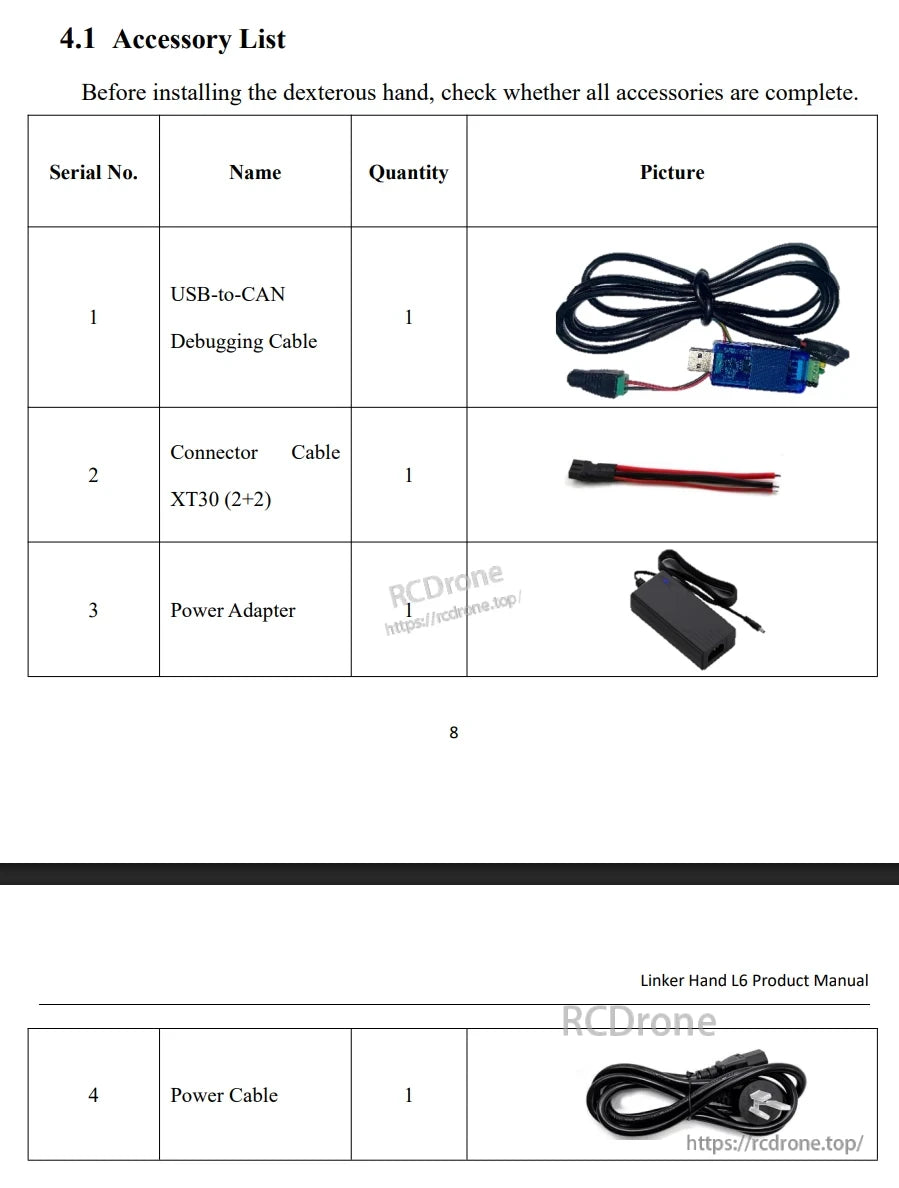
Список аксессуаров для Linker Hand L6: USB-to-CAN кабель, разъем XT30, блок питания и силовой кабель. Проверьте комплектность перед установкой.
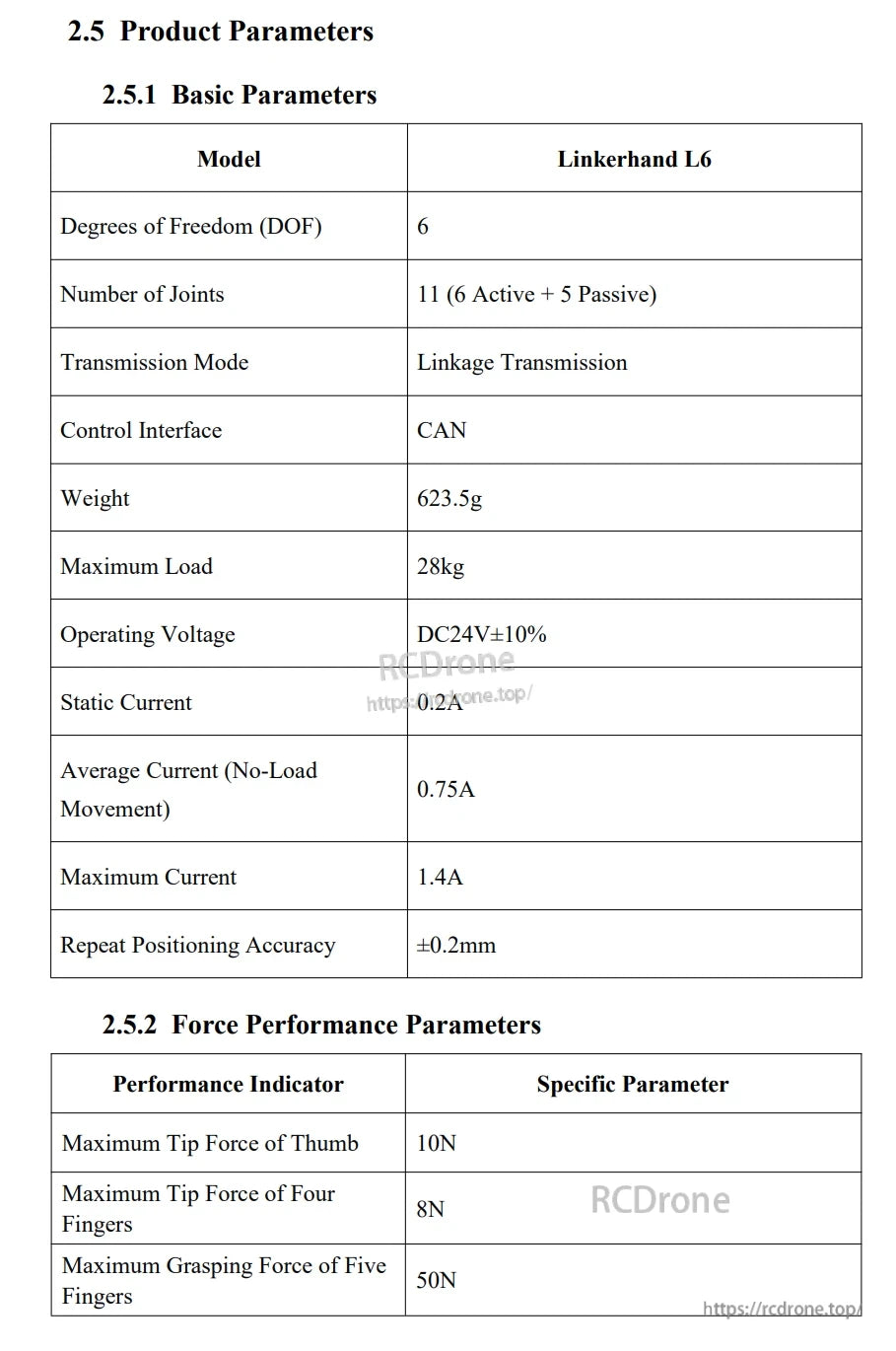
Роботизированная рука Linkerhand L6 имеет 6 степеней свободы, 11 суставов, CAN управление, весит 623,5 г, выдерживает максимальную нагрузку 28 кг, работает на DC24V±10%, предлагает точность ±0,2 мм и обеспечивает силу захвата до 50N.
Related Collections







