







LINKERBOT Linker Hand O6 Роботизированная рука, 6 степеней свободы, 11 суставов, CAN/RS485, усилие захвата 130Н, точность ±0,2мм, DC24V±10%
LINKERBOT Linker Hand O6 Роботизированная рука, 6 степеней свободы, 11 суставов, CAN/RS485, усилие захвата 130Н, точность ±0,2мм, DC24V±10%
LINKERBOT
Не удалось загрузить сведения о доступности самовывоза
Обзор
LINKERBOT Linker Hand O6 - это роботизированная рука, разработанная для компактной интеграции и точного манипулирования. Она обеспечивает 6 степеней свободы с 11 суставами (6 активных + 5 пассивных), передачу с червячным редуктором для стабильного привода, управление CAN/RS485 и опциональное тактильное восприятие. Ловкая структура обеспечивает силу захвата до 130N с точностью повторного позиционирования ±0,2 мм при рабочем напряжении DC24V±10%. Легкая конструкция весом 370 г и небольшой размер поддерживают обработку логистики, промышленную сборку и сценарии захвата предметов неправильной формы.
Ключевые особенности
Компактный &и ловкий
Компактный структурный дизайн снижает нагрузку на оборудование, одновременно повышая гибкость для точного захвата в ограниченных пространствах.
Высокая прочность
Изготовлен из алюминиевого сплава для легкости, прочности и устойчивости к износу, поддерживая долгосрочную стабильную работу.
Интеграция устройства с облаком
Интеграция устройства с облаком позволяет быстро развертывать через облачную библиотеку навыков с упрощенной эксплуатацией и настройкой.
Спецификации
| Модель | LINKERBOT Linker Hand O6 |
| Степени свободы (DoF) | 6 |
| Количество суставов | 11 (6 активных + 5 пассивных) |
| Режим передачи | Червячная передача |
| Управляющий интерфейс | CAN/RS485 |
| Вес | 370г |
| Максимальная нагрузка | 30кг |
| Рабочее напряжение | DC24V±10% |
| Точность повторного позиционирования | ±0.2мм |
| Тактильный датчик | Опционально |
| Максимальная сила на кончике большого пальца | 28N |
| Максимальная сила на кончиках четырех пальцев | 33N |
| Максимальная сила захвата пяти пальцев | 130N |
| Размеры (Внешний вид) | Высота 177мм; Ширина 76.5мм; Толщина 40мм |
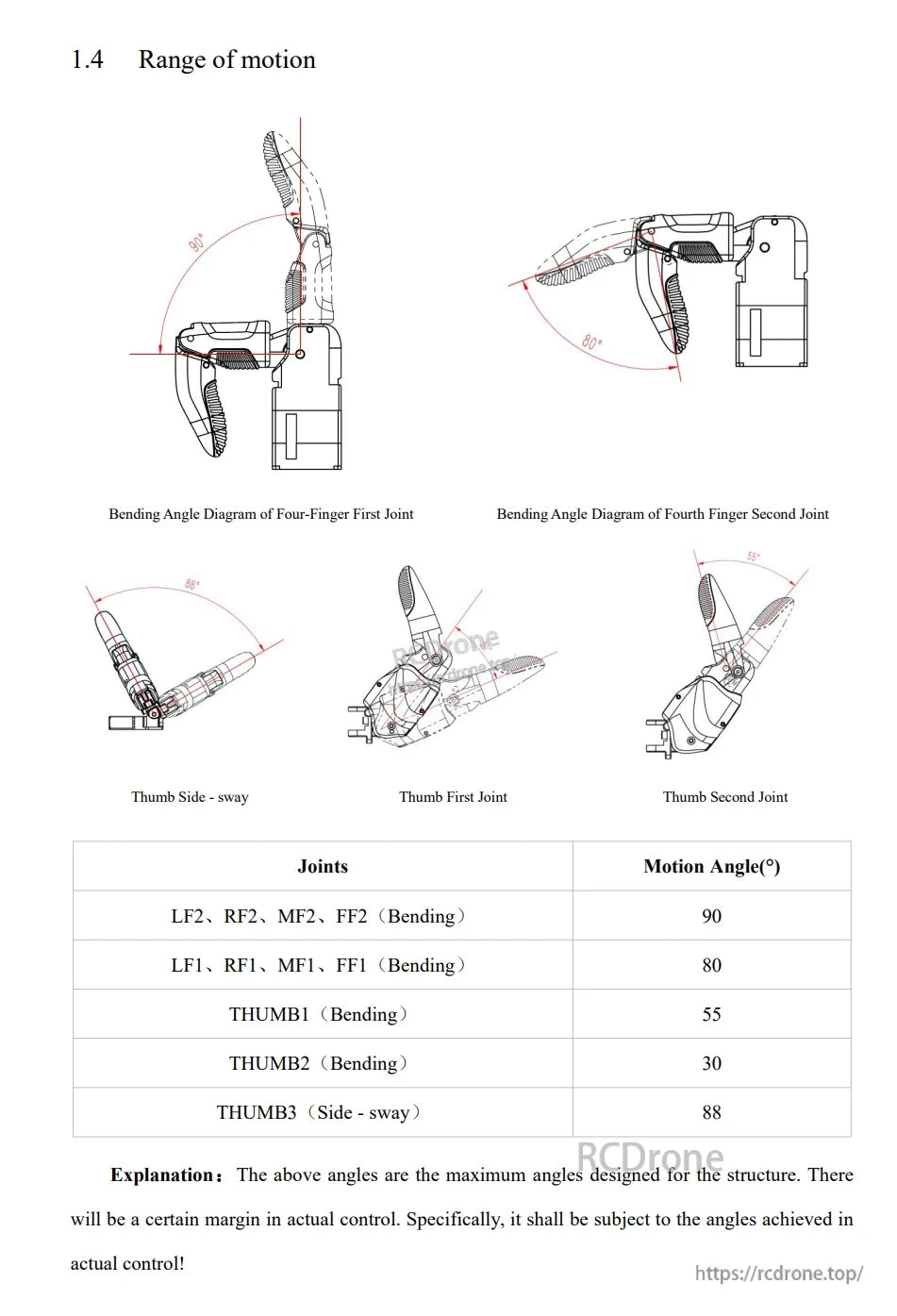
Диапазон движения
| LF2, RF2, MF2, FF2 (Сгибание) | 90° |
| LF1, RF1, MF1, FF1 (Сгибание) | 80° |
| BIG1 (Сгибание) | 55° |
| BIG2 (Сгибание) | 30° |
| BIG3 (Боковое - колебание) | 88° |
Что включено
- USB-to-CAN отладочный кабель ×1
- Соединительный кабель XT30 (2+2) ×1
- Блок питания ×1
- Сетевой кабель ×1
- Linker Hand O6 x1
Для продаж или технической поддержки, свяжитесь с [email protected] or посетите https://rcdrone.top/.
Применения
- Обработка логистики и передача материалов
- Промышленная сборка и манипуляция инструментами
- Стабильное захватывание неправильных форм и потребительских товаров
Руководства
Linker_Hand_O6_Product_Manual.pdf
Детали

Linker Hand O6 предлагает 6 активных и 5 пассивных суставов для точного, сильного захвата. Компактный, прочный алюминиевый дизайн подходит для логистики, сборки и захвата неправильных форм. Имеет облачную интеграцию для легкого обучения ИИ без программирования.


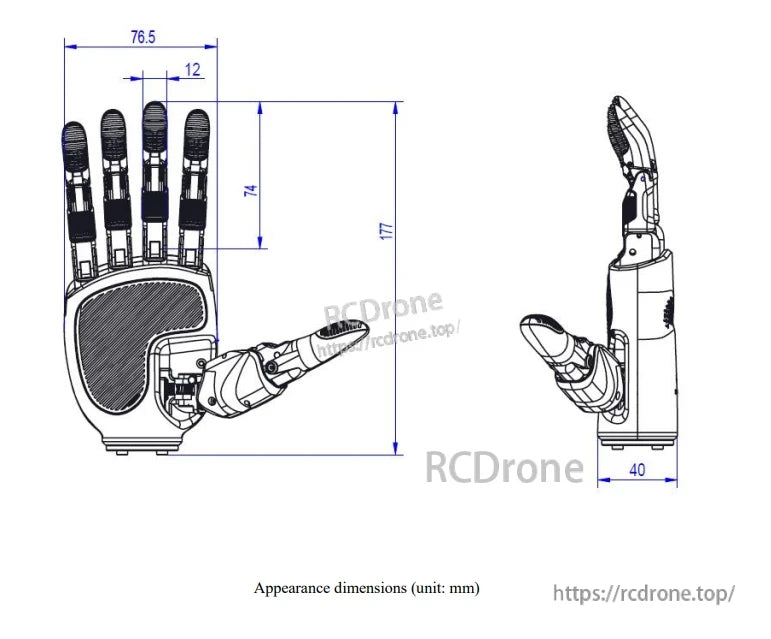
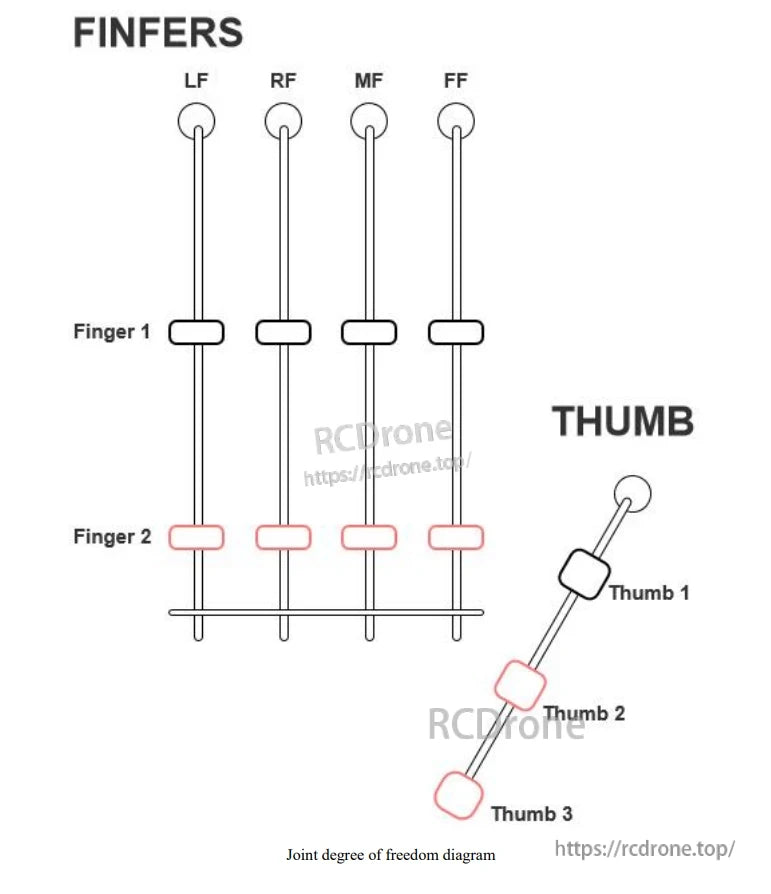
Диаграмма степеней свободы суставов пальцев и большого пальца
Пальцы сгибаются на 80–90°, большой палец сгибается на 30–55°, а боковое отклонение достигает 88°. Это максимальные углы, фактическое управление может немного варьироваться.
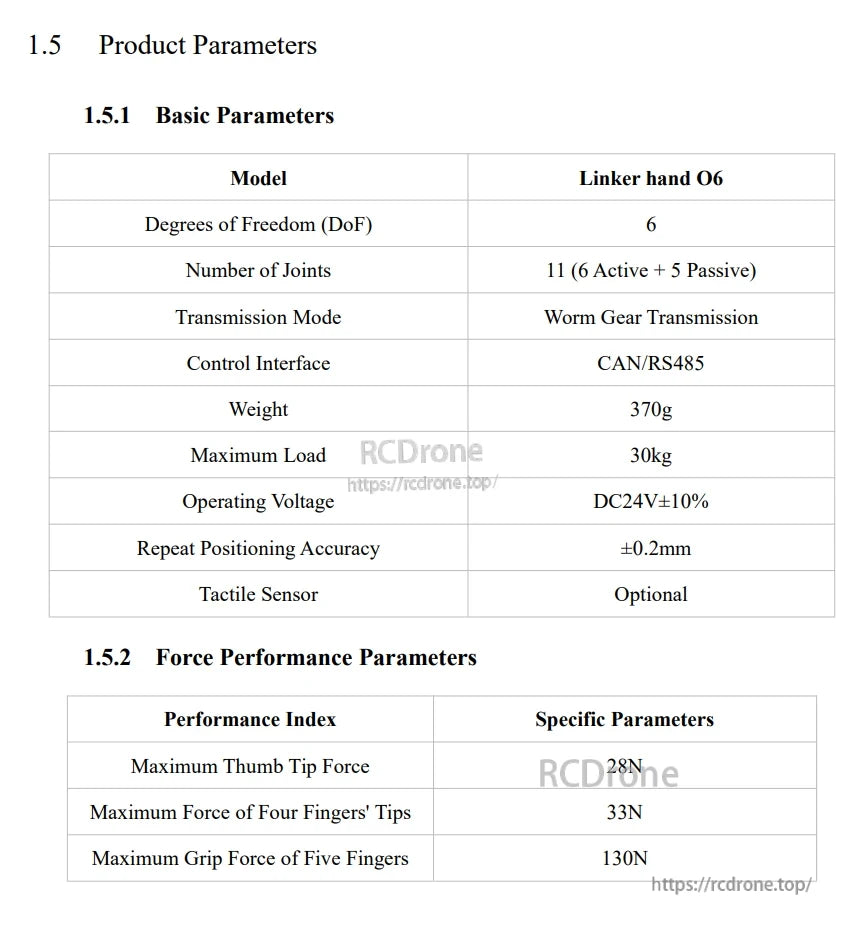
Роботизированная рука Linker Hand O6 имеет 6 степеней свободы, 11 суставов, червячную передачу, управление CAN/RS485, весит 370 г, выдерживает максимальную нагрузку 30 кг, работает при DC24V±10%, с точностью ±0.2 мм и предлагает дополнительные тактильные датчики с заданными характеристиками силы.

Список аксессуаров для установки ловкой руки: USB-to-CAN кабель, разъем XT30, блок питания и силовой кабель — все в количестве одного.
Related Collections







