



Двигатель LKMTECH MF4005-V2 12В RS485/CAN 18-битный магнитный энкодер, опция привода DF40V2 для робототехники
Двигатель LKMTECH MF4005-V2 12В RS485/CAN 18-битный магнитный энкодер, опция привода DF40V2 для робототехники
LKMTECH
Не удалось загрузить сведения о доступности самовывоза
Обзор
LKMTECH MF4005-V2 - это мотор, разработанный для интегрированных мехатронных приложений, требующих легкого дизайна, высокой точности управления и высокого крутящего момента. Обновление MF4005 V2 включает: разрешение энкодера, обновленное с 14 бит до 18 бит, оптимизацию крутящего момента, поддержку PWM-входа и связь CAN/RS485 с несколькими вариантами скорости передачи данных.
Ключевые особенности
- Интегрированный дизайн: механико-электрическая интеграция
- Легкий дизайн: упрощенный дизайн из алюминиевых сплавов аэрокосмического назначения
- Высокая точность управления: магнитный энкодер (обновление MF4005 V2 указывает на 14-битный, обновленный до 18-битного)
- Высокий крутящий момент: высокопроизводительный постоянный магнит RbFeB
- Поддерживает PWM вход
- Связь: CAN или RS485
- Функции привода: может переключаться между режимом крутящего момента, режимом скорости и режимом положения
- Основной контроллер: 32-битный процессор Cortex-M4 ARM высокой эффективности (привод)
- Мониторинг температуры статора в реальном времени (привод)
- Этап мощности привода: полный мостовой контур с низким внутренним сопротивлением и высоким током
- 18-битный абсолютный магнитный энкодер с одним оборотом (текст функции привода); одна калибровка, нулевая позиция никогда не теряется
- Заметки по конструкции мотора: внешний ротор; многослойный арочный дизайн с постоянным магнитом; меньший зазор; радиальная магнитизация; 0.2 мм лист силиконовой стали; провод с изоляцией класса H, эмалированный; магнитный материал класса SH NdFeB
- OEM/ODM услуги (не спецификация продукта)
- Программное обеспечение параметров: программное обеспечение, предоставляемое для настройки параметров, тестирования и обновления; поддерживает разработку с открытым исходным кодом, такую как ПК, MCU, PLC, ICP и RPi
Сценарии применения
- Человекообразные роботы
- Роботизированные руки
- Экзоскелеты
- Четвероногие роботы
- AGV транспортные средства
- ARU роботы
- Камера PTZ
- Лазерный лидар
- Робот для инспекции электростанций
- Промышленная инспекция
Спецификации
Модель мотора: MF4005-V2
| Параметр | Значение (25 витков) | Значение (40 витков) |
|---|---|---|
| Название товара | MF4005-V2 | MF4005-V2 |
| Витки | 25 | 40 |
| Номинальное напряжение | 12В | 12В |
| Максимальная скорость | 2390Об/мин | 1300Об/мин |
| Номинальный крутящий момент | 0.07 N.m | 0.06 N.m |
| Номинальная скорость | 1600 об/мин | 700 об/мин |
| Номинальный ток | 1.44A | 0.81A |
| Максимальная мощность | 14W | 4.6W |
| Максимальный крутящий момент | 0.25 N.m | 0.12 N.m |
| Константа скорости | 133 об/мин/В | 58 об/мин/В |
| Константа крутящего момента | 0.05 N.m/A | 0.07 N.m/A |
| Тип обмотки | Y | Y |
| Сопротивление фазы | 1.9Ω | 4.3Ω |
| Индуктивность фазы | 0.5mH | 1.2мГ |
| Полюса мотора | 26 | 26 |
| Инерция ротора | 56 гсм² | 56 гсм² |
| Температура мотора | ДА | ДА |
| Номинальная нагрузка подшипника | 140N | 140N |
| Вес мотора | 65г | 65г |
| Рекомендуемый привод | DF40V2 | DF40V2 |
| Входное напряжение привода | 7.4-32V | 7.4-32V |
| Связь | RS485 ИЛИ CAN | RS485 ИЛИ CAN |
| Частота связи | RS485: 500Гц (115200бит/с) / CAN: 2КГц (1Мбит/с) | RS485: 500Гц (115200бит/с) / CAN: 2КГц (1Мбит/с) |
| Энкодер | 18-битный магнитный энкодер | 18-битный магнитный энкодер |
| Скорость передачи данных энкодера (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1М, 2Мбит/с | 9600, 19200, 57600, 115200, 230400, 406800, 1М, 2Мбит/с |
| Скорость передачи данных (CAN) | 100К, 125К, 250К, 500К, 1М | 100К, 125К, 250К, 500К, 1М |
| Режим управления | Контур крутящего момента (24КГц) / Контур скорости (8КГц) / Контур положения (8КГц) | Контур крутящего момента (24КГц) / Контур скорости (8КГц) / Контур положения (8КГц) |
| Кривая ускорения | Трапециевидное ускорение | Трапециоидальное ускорение |
Определение интерфейса
Переключатель ID: ПЕРЕКЛЮЧАТЕЛЬ ID
| Интерфейс | Примечание |
|---|---|
| А/Л | RS485-A или CAN-L |
| Б/Н | RS485-B или CAN-H |
| V+ | Положительное питание |
| V+ | Положительное питание |
| V- | Отрицательное питание |
| V- | Отрицательное питание |
| Т | UART Передатчик |
| Р | UART Приемник |
| Г | Заземление сигнала |
Для предварительных продаж или поддержки интеграции (настройка RS485/CAN, выбор скорости передачи и файлы CAD) свяжитесь с [email protected] or посетите https://rcdrone.top/.
Руководства / Файлы
Детали

MF4005‑V2 интегрирует мотор, энкодер и функции привода для компактных робототехнических сборок, с обновленным 18-битным магнитным энкодером и опциями связи CAN/RS485.
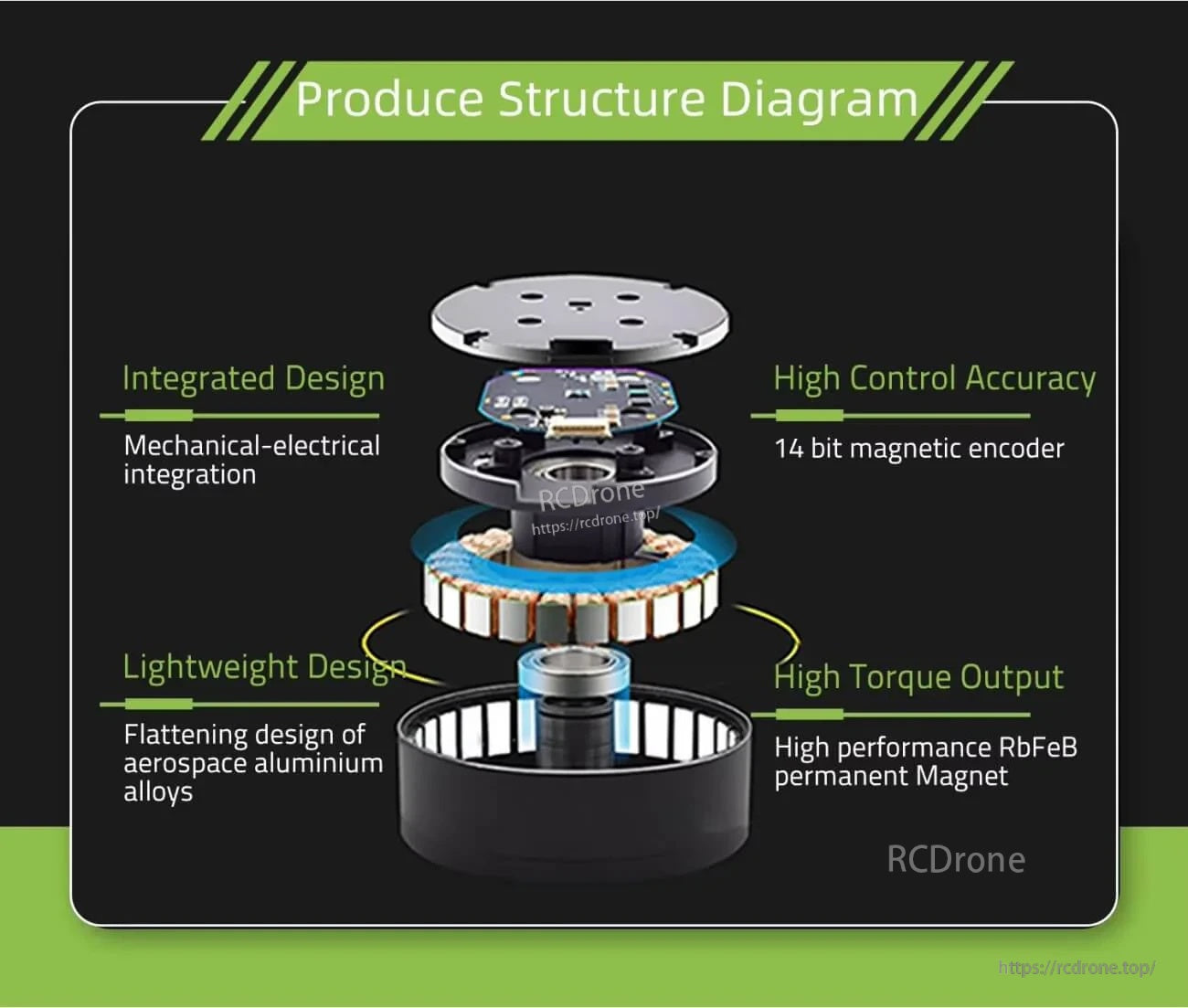
Интегрированная, легкая конструкция сочетает в себе электронику привода с моторным узлом для поддержки точного управления и высокого крутящего момента.
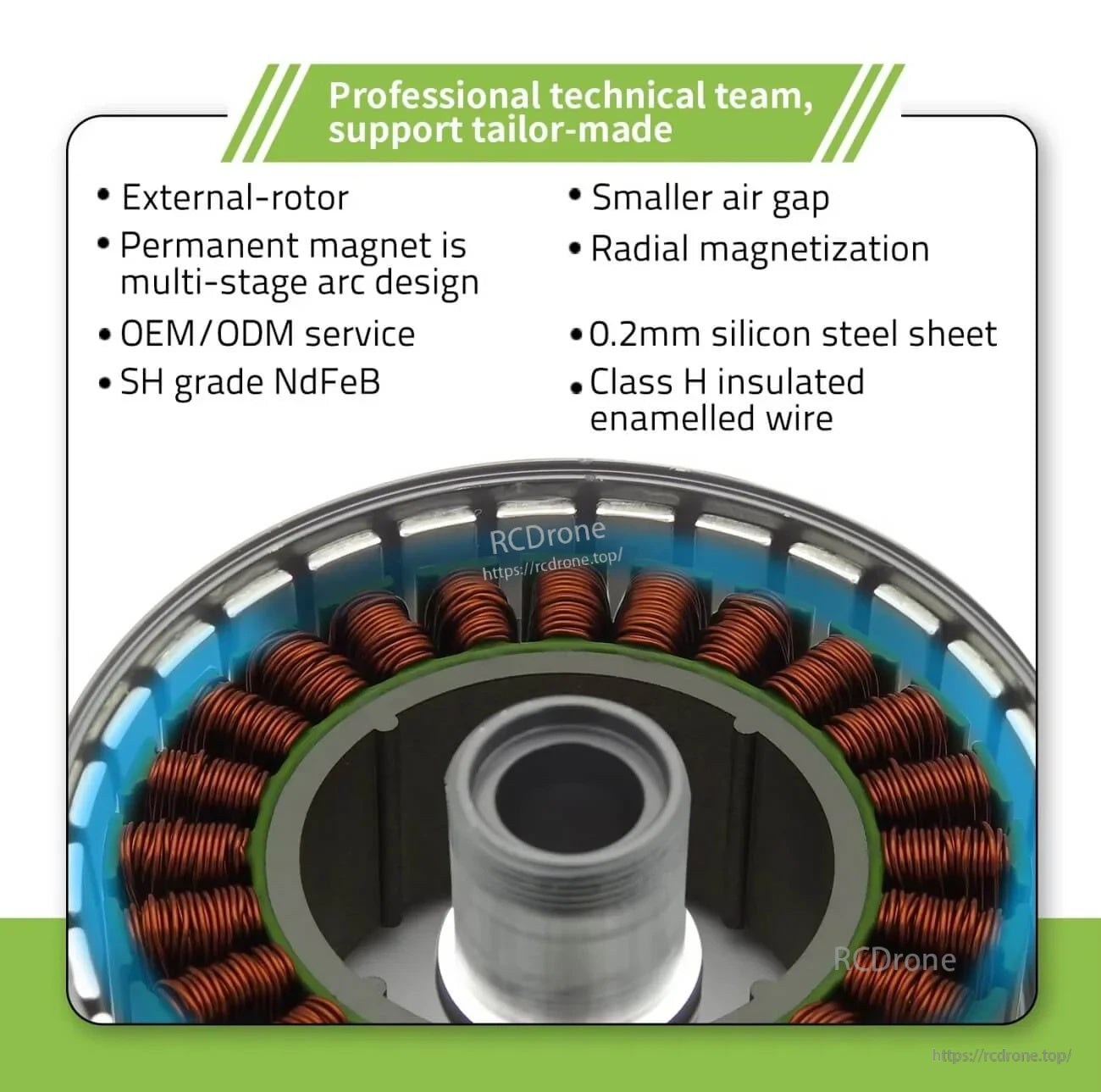
Дизайн с внешним ротором и плотная схема обмотки помогают сбалансировать размер, отзывчивость и крутящий момент для роботизированных суставов и актуаторов.
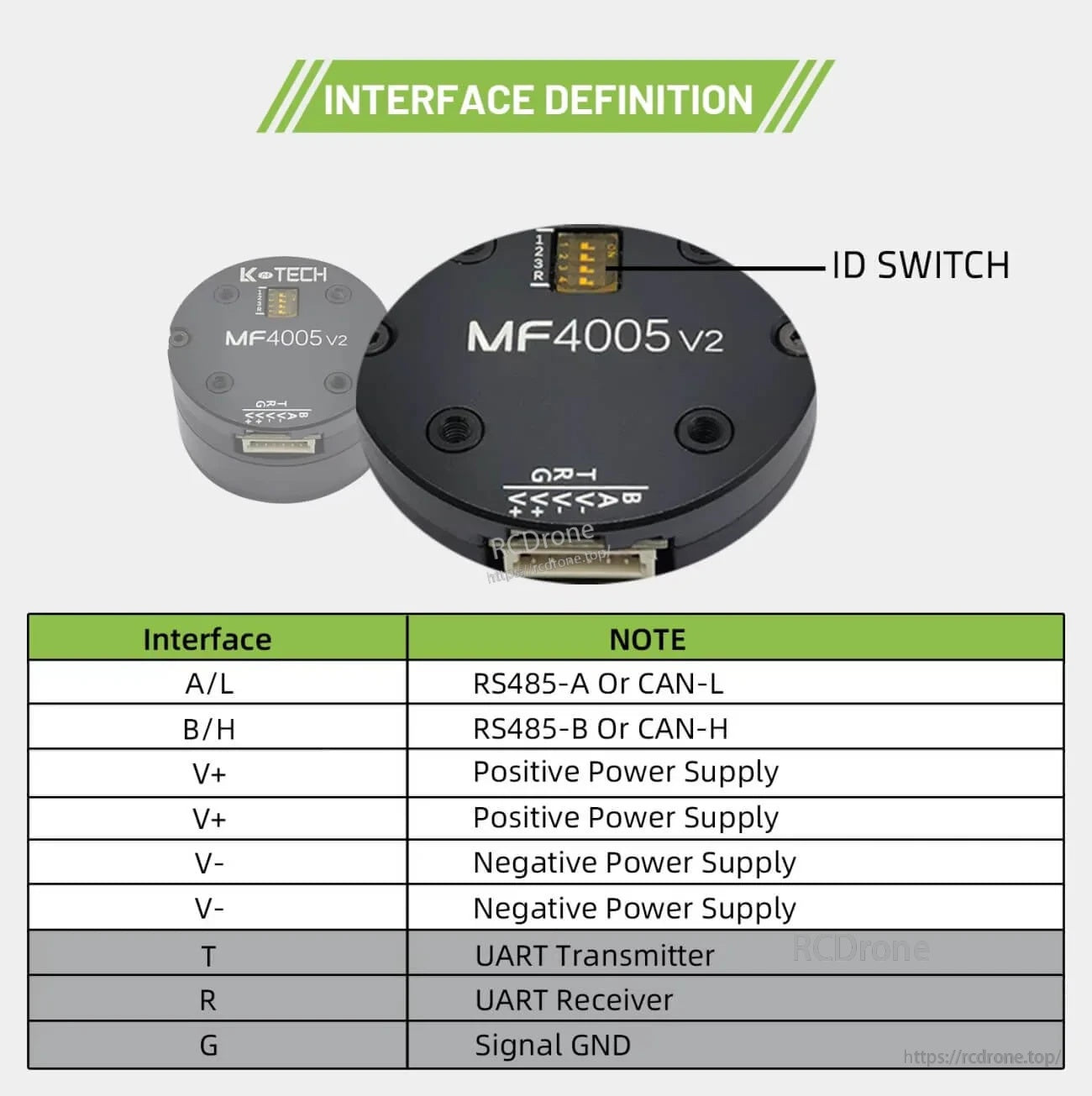
Проводка упрощена с помощью четко обозначенного разъема и переключателя ID для конфигураций шины с использованием RS485 или CAN.
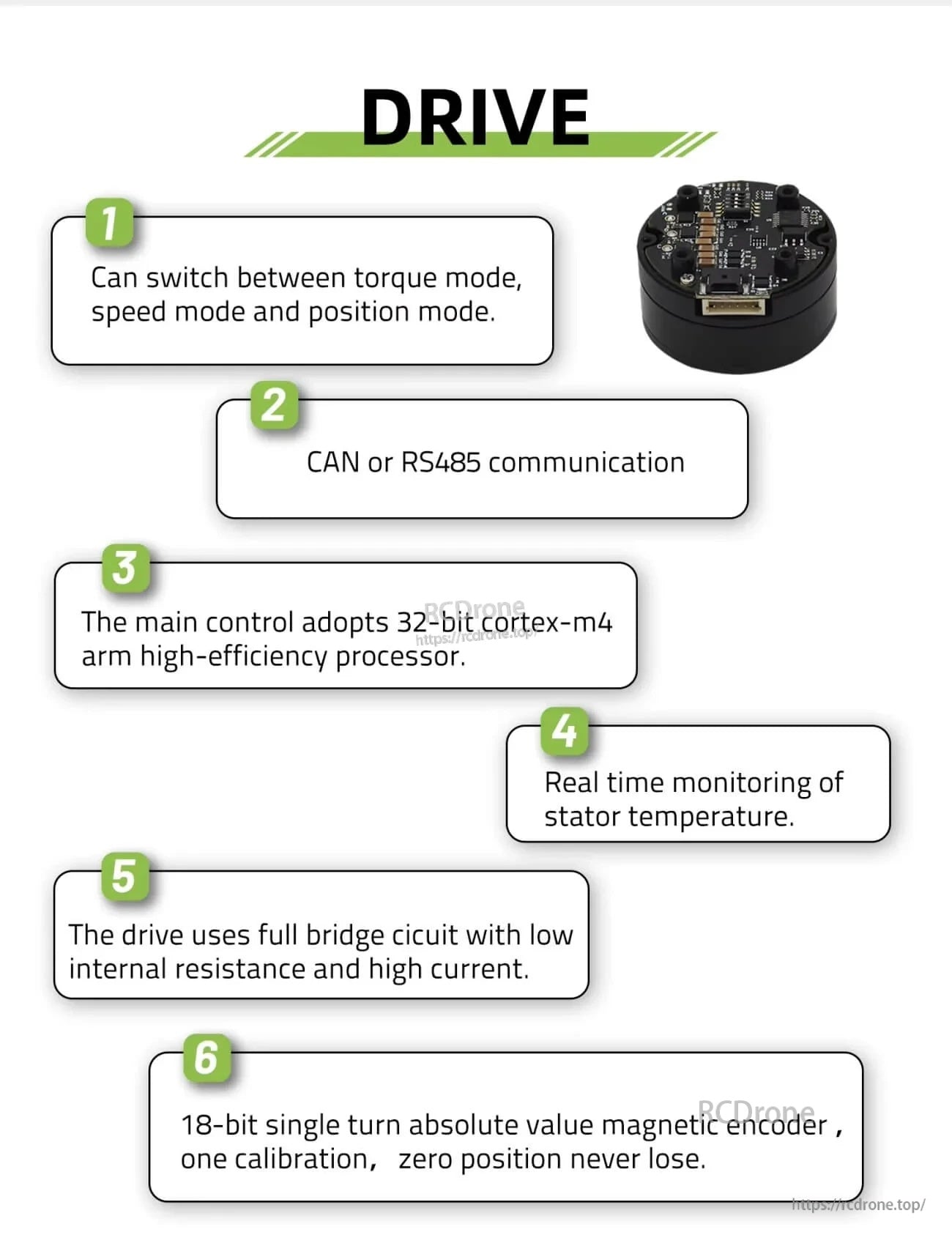
Возможности привода включают выбор крутящего момента, скорости и режимов положения, а также мониторинг температуры статора в реальном времени через CAN или RS485.
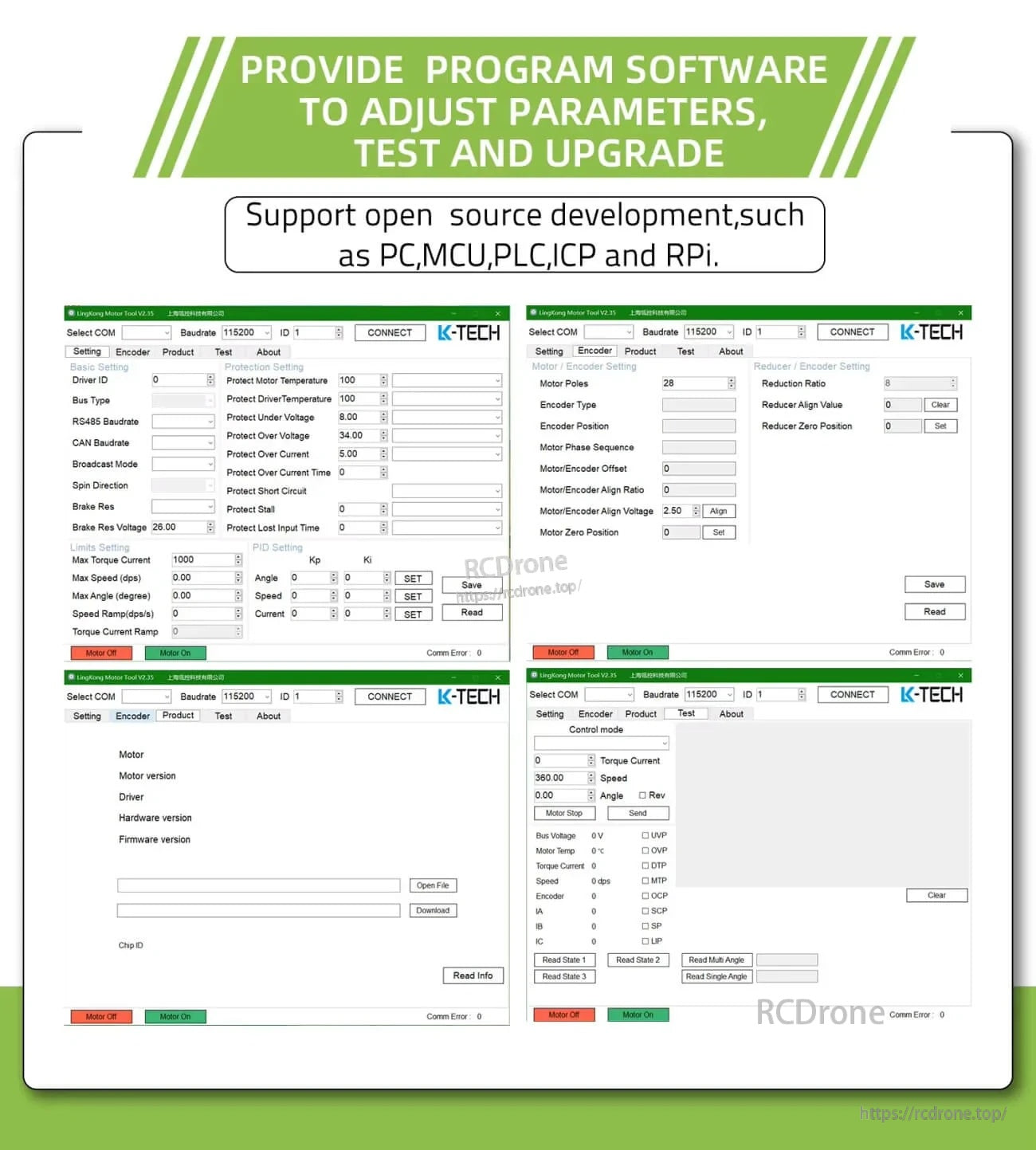
Поддержка программного обеспечения для ПК помогает с настройкой параметров, тестированием и обновлениями, с вариантами, подходящими для рабочих процессов разработки.
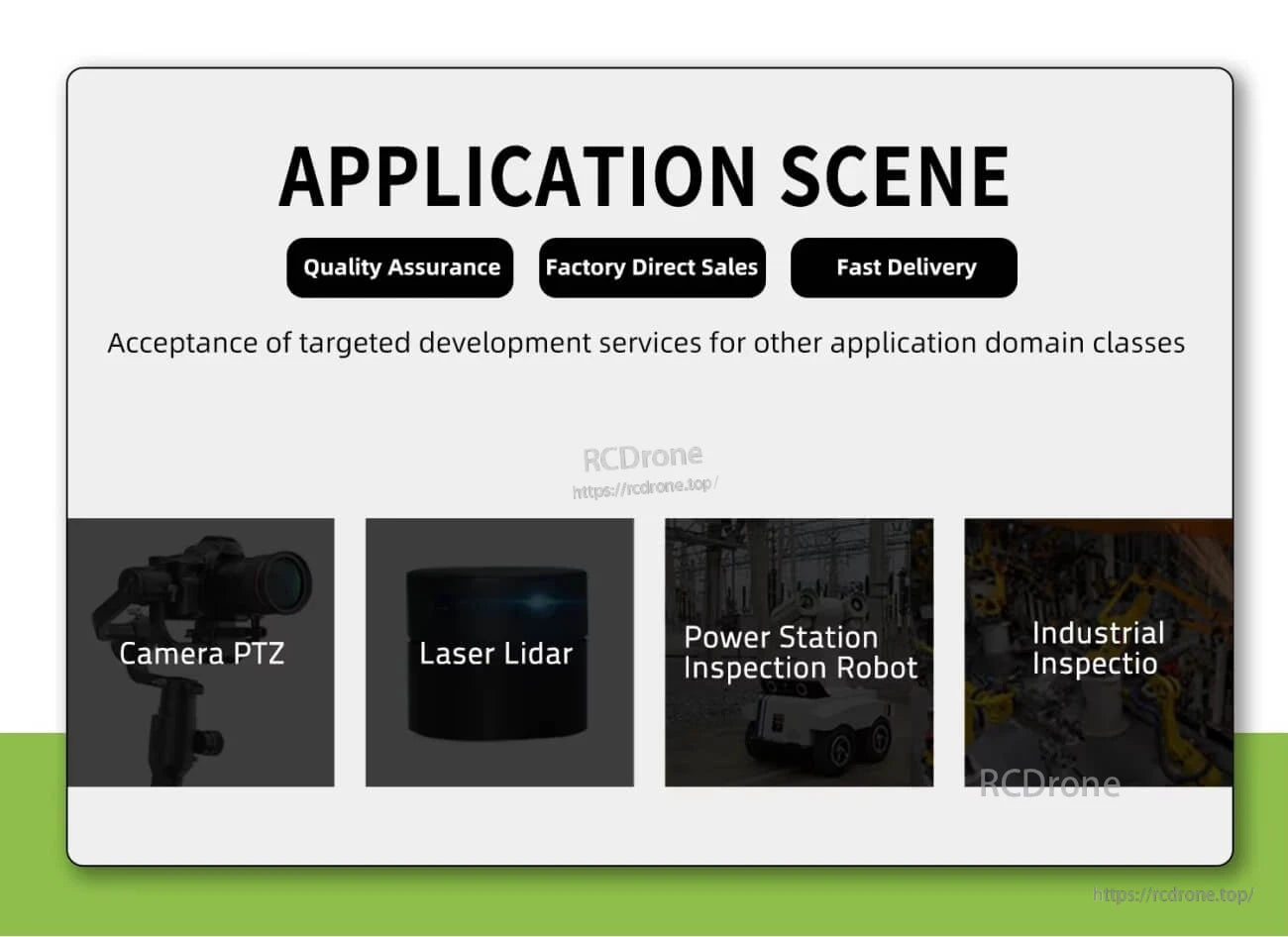
Общие области применения включают головки PTZ-камер, системы лидара и инспекционные роботы, используемые в промышленных условиях.
Related Collections



