



Двигатель LKMTECH MF4015-V2 16В 1350 об/мин 0,65Н·м RS485/CAN 18-битный магнитный энкодер для роботов
Двигатель LKMTECH MF4015-V2 16В 1350 об/мин 0,65Н·м RS485/CAN 18-битный магнитный энкодер для роботов
LKMTECH
Не удалось загрузить сведения о доступности самовывоза
Обзор
Мотор LKMTECH MF4015-V2 (MF4015v2) является компактным интегрированным мотором для робототехнических приложений, оснащенным обратной связью от энкодера и коммуникацией RS485 или CAN для систем управления движением.
Для поддержки интеграции перед покупкой свяжитесь с https://rcdrone.top/ или отправьте электронное письмо на [email protected].
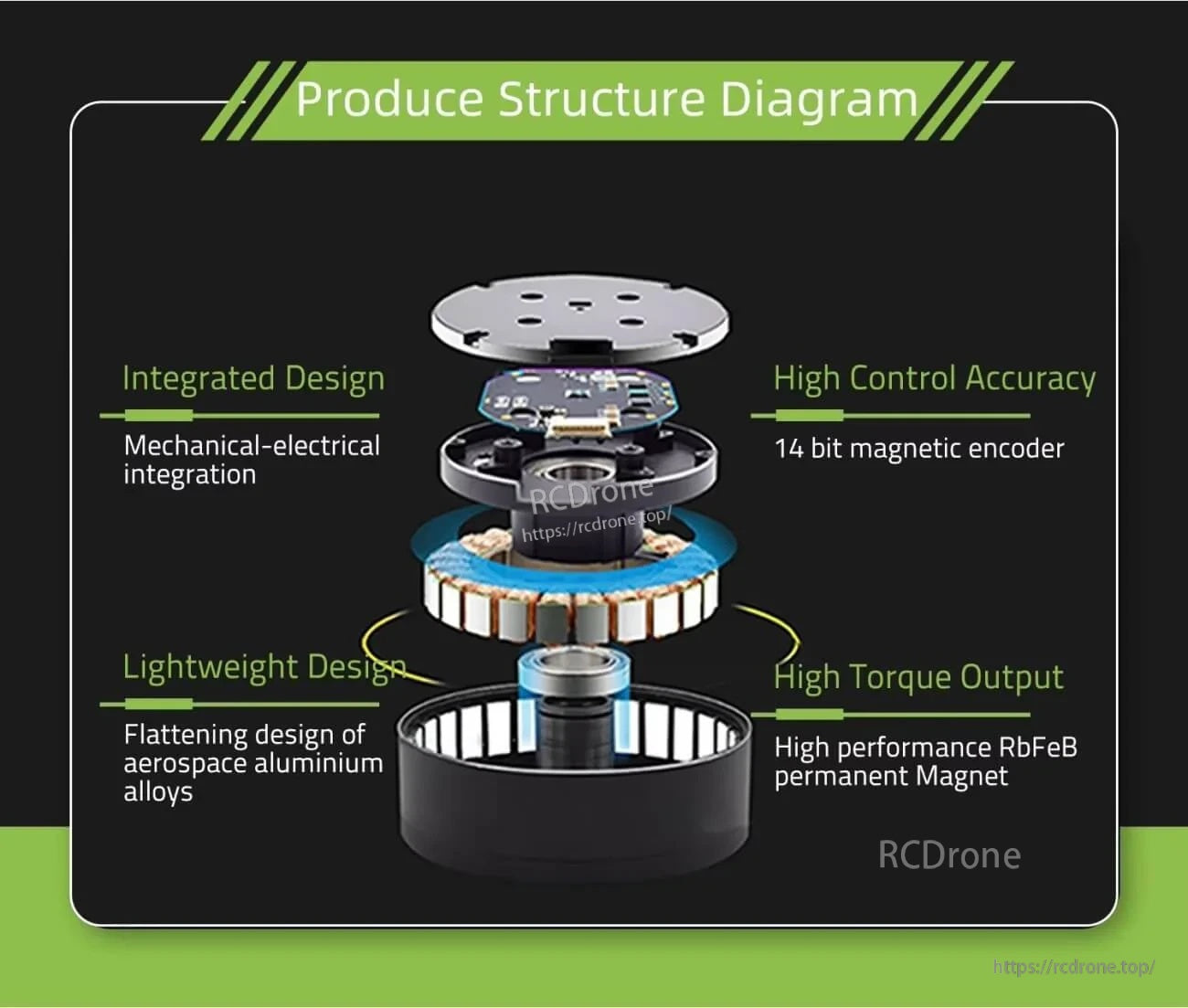
Ключевые особенности
- Интегрированный дизайн (механическая и электрическая интеграция)
- Легкий дизайн (упрощенный дизайн из алюминиевых сплавов для аэрокосмической отрасли)
- Высокая точность управления (V2: разрешение энкодера обновлено с 14 бит до 18 бит)
- Высокий крутящий момент (высокопроизводительный постоянный магнит RbFeB)
- Оптимизация крутящего момента при заедании
- Поддержка PWM-входа
- CAN и RS485 связь; поддерживает различные скорости передачи данных
Технические характеристики
| Название товара | MF4015v2 |
| Обороты | 20 |
| Номинальное напряжение | 16В |
| Максимальная скорость | 1350 об/мин |
| Номинальный крутящий момент | 0.25 Н·м |
| Номинальная скорость | 750 об/мин |
| Номинальный ток | 2.2A |
| Максимальная мощность | 22W |
| Максимальный крутящий момент | 0.65N.m |
| Постоянная скорость | 46.9об/мин/В |
| Постоянная крутящего момента | 0.11N.m/A |
| Тип обмотки | Y |
| Сопротивление фазы | 3Ω |
| Индуктивность фазы | 1mH |
| Полюса мотора | 26 |
| Инерция ротора | 81gcm² |
| Температура мотора | ДА |
| Номинальная нагрузка подшипника | 140N |
| Вес мотора | 116g |
| Рекомендуемый драйв | DF40v2 |
| Входное напряжение драйва | 7.4~32V |
| Связь | RS485 или CAN |
| Частота связи | RS485:500Гц(115200бит/с)/CAN:2КГц(1Мбит/с) |
| Энкодер | 18-битный магнитный энкодер |
| Скорость передачи данных энкодера (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1М, 2Мбит/с |
| Скорость передачи данных (CAN) | 100К,125К,250К,500К,1М |
| Режим управления | Контур крутящего момента (24КГц)/Контур скорости (8КГц)/Контур положения (8КГц) |
| Кривая ускорения | Трапециевидное ускорение |
Определение интерфейса
- Переключатель ID
- A/L: RS485-A или CAN-L
- B/H: RS485-B или CAN-H
- V+: Положительное питание
- V-: Отрицательное питание
- T: Передатчик UART
- R: Приемник UART
- G: Сигнал GND
Применения
- Человекообразные роботы
- Роботизированные руки
- Экзоскелеты
- Четвероногие роботы
- AGV-автомобили
- Роботы ARU
- Камера PTZ
- Лазерный лидар
- Робот для инспекции электростанций
- Промышленная инспекция
Руководства
Детали

MF4015 V2 интегрирует двигатель, драйвер и обратную связь от энкодера в компактном модуле для роботизированных суставов и управления движением.
Интегрированный механико-электрический дизайн обеспечивает легкость сборки при сохранении высокого крутящего момента и точного управления.

Четкая маркировка интерфейса помогает с подключением для RS485 или CAN связи, а также для подключения питания и UART.

Related Collections



