



Двигатель LKMTECH MF9010-V2 24В, интегрированный высокомоментный серводвигатель с энкодером 18 бит, RS485/CAN, привод DF70v2
Двигатель LKMTECH MF9010-V2 24В, интегрированный высокомоментный серводвигатель с энкодером 18 бит, RS485/CAN, привод DF70v2
LKMTECH
Не удалось загрузить сведения о доступности самовывоза
Обзор
Мотор LKMTECH MF9010-V2 является интегрированным моторным решением, разработанным для приложений, требующих легкого дизайна, высокой точности управления и высокого крутящего момента. MF9010 v2 включает обновления продукта, такие как повышение разрешения энкодера с 14 бит до 18 бит, оптимизацию крутящего момента, поддержку PWM-входа и связь CAN/RS485 с различными скоростями передачи.
Ключевые особенности
- Интегрированный дизайн; легкий дизайн; высокая точность управления; высокий крутящий момент
- Разрешение энкодера: 14 бит, обновлено до 18 бит
- Оптимизация крутящего момента при заедании
- Поддержка PWM-входа
- Поддержка CAN и RS485 с различными скоростями передачи данных
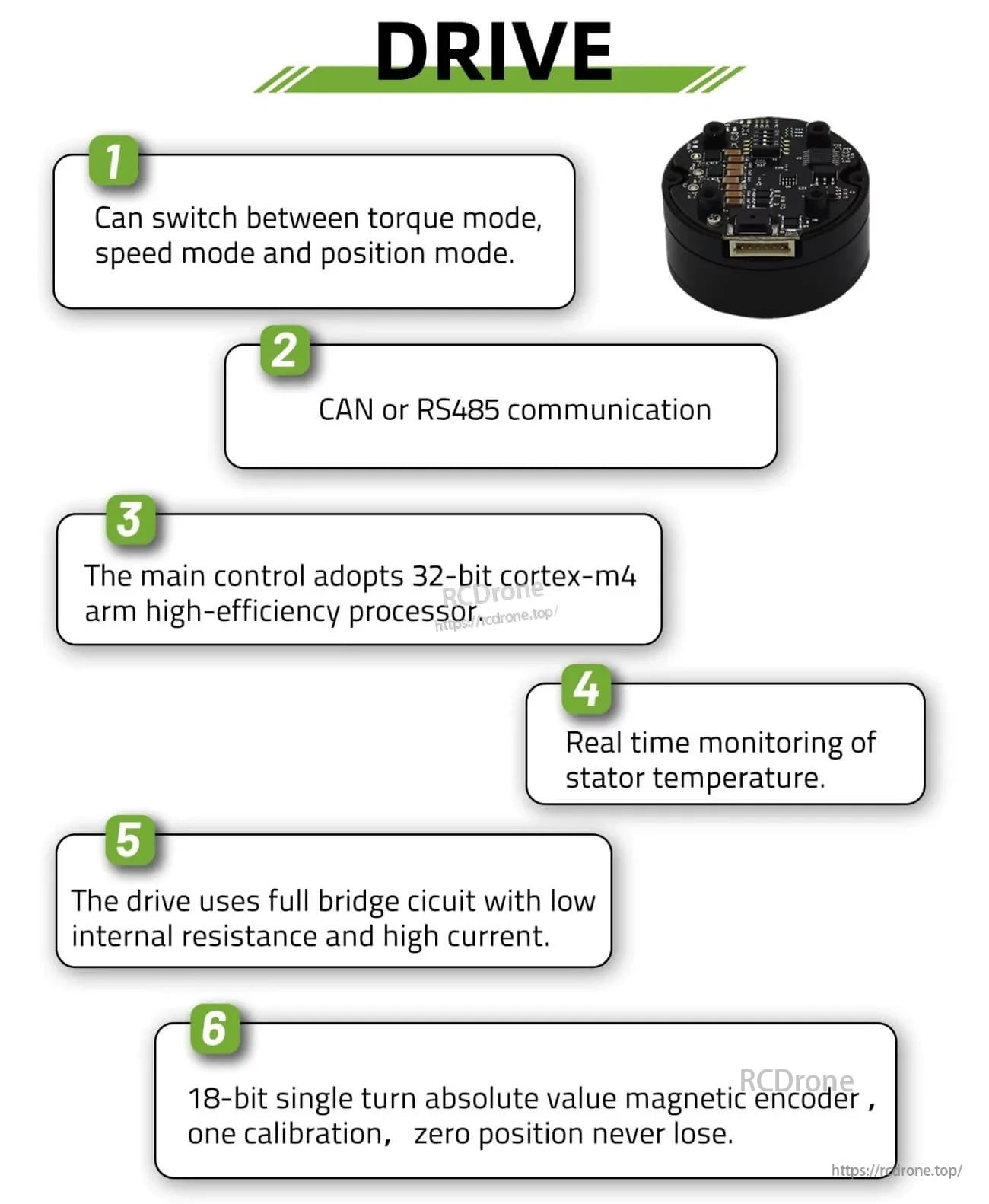
- Привод может переключаться между режимами крутящего момента, скорости и положения
- Основной контроллер использует 32-битный процессор Cortex-M4 ARM с высокой эффективностью
- Мониторинг температуры статора в реальном времени
- Привод использует полный мостовой контур с низким внутренним сопротивлением и высоким током
- 18-битный абсолютный магнитный энкодер с одним оборотом; одна калибровка; нулевая позиция никогда не теряется
- Предоставляется программное обеспечение для настройки параметров, тестирования и обновления
- Поддержка разработки с открытым исходным кодом, такая как ПК, MCU, PLC, ICP и RPi
Применения
- Человекообразные роботы
- Роботизированные руки
- Экзоскелеты
- Четвероногие роботы
- AGV транспортные средства
- ARU роботы
- Камера PTZ
- Лазерный лидар
- Робот для инспекции электростанций
- Промышленная инспекция
Технические характеристики
| Параметр | MF9010v2 (17 оборотов) | MF9010v2 (35 оборотов) |
|---|---|---|
| Название товара | MF9010v2 | MF9010v2 |
| Обороты | 17 | 35 |
| Номинальное напряжение | 24В | 24В |
| Максимальная скорость | 1465 об/мин | 690 об/мин |
| Номинальный крутящий момент | 1.09Н.м | 1.07Н.м |
| Номинальная скорость | 1080об/мин | 450об/мин |
| Номинальный ток | 6.66А | 3.27А |
| Максимальная мощность | 215Вт | 128Вт |
| Максимальный крутящий момент | 2.2Н.м | 4.1Н.м |
| Константа скорости | 45об/мин/В | 18.8об/мин/В |
| Константа крутящего момента | 0.16Н.м/А | 0.33Н.м/А |
| Тип обмотки | Y | Y |
| Сопротивление фазы | 0.29Ω | 1.15Ω |
| Индуктивность фазы | 0.53mH | 3mH |
| Полюса мотора | 28 | 28 |
| Инерция ротора | 2860gcm² | 2860gcm² |
| Температура мотора | ДА | ДА |
| Номинальная нагрузка подшипника | 650N | 650N |
| Вес мотора | 525g | 525g |
| Рекомендуемый привод | DF70v2 | DF70v2 |
| Входное напряжение привода | 7.4-32V | 7.4-32V |
| Связь | RS485 ИЛИ CAN | RS485 ИЛИ CAN |
| Частота связи | RS485:500Гц(115200бит/с)/CAN:2КГц(1Мбит/с) | RS485:500Гц(115200бит/с)/CAN:2КГц(1Мбит/с) |
| Энкодер | 18-битный магнитный энкодер | 18-битный магнитный энкодер |
| Скорость передачи данных энкодера (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1М, 2Мбит/с | 9600, 19200, 57600, 115200, 230400, 406800, 1М, 2Мбит/с |
| Скорость передачи данных (CAN) | 100К, 125К, 250К, 500К, 1М | 100К, 125К, 250К, 500К, 1М |
| Режим управления | Контур момента (24КГц)/Контур скорости (8КГц)/Контур положения (8КГц) | Контур момента (24КГц)/Контур скорости (8КГц)/Контур положения (8КГц) |
| Кривая ускорения | Трапециевидное ускорение | Трапециоидальное ускорение |
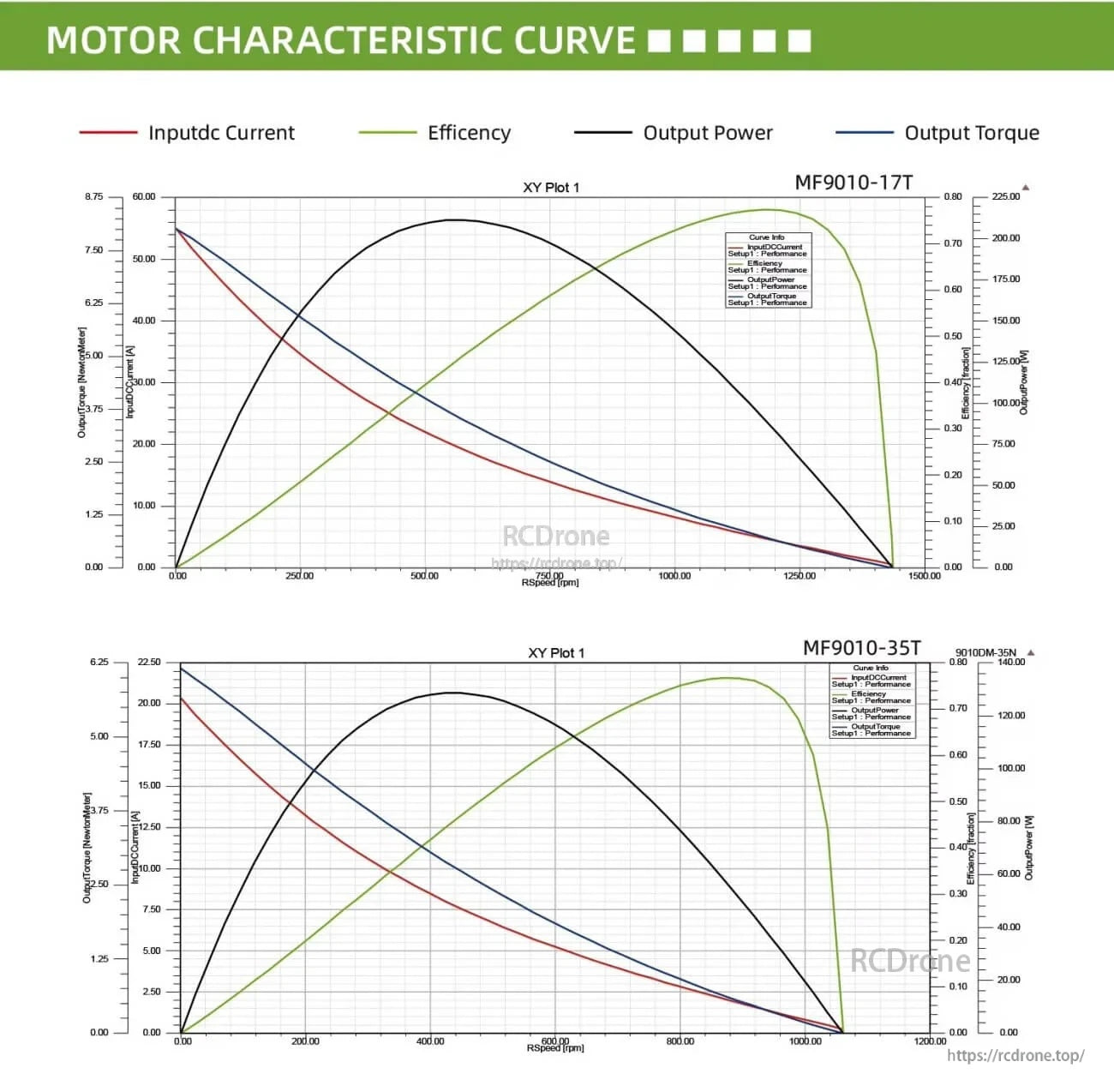
Характеристика мотора (Справка)
- Легенды характеристики МОТОРА: Входной постоянный ток, Эффективность, Выходная мощность, Выходной крутящий момент
- Обозначения кривой: MF9010-17T и MF9010-35T
Руководства / Документы
Для получения рекомендаций по выбору и поддержки интеграции, свяжитесь с [email protected] or посетите https://rcdrone.top/ .
Детали

MF9010 V2 сочетает в себе мотор, энкодер и готовую к установке систему управления для компактных конструкций, которым требуется точное управление движением с высоким крутящим моментом.
Несколько режимов управления и подключение CAN/RS485 упрощают настройку привода для различных суставов робота и осей автоматизации.
Кривые производительности помогают сравнить 17- и 35-обмотки для вашей целевой скорости, крутящего момента и диапазона эффективности.
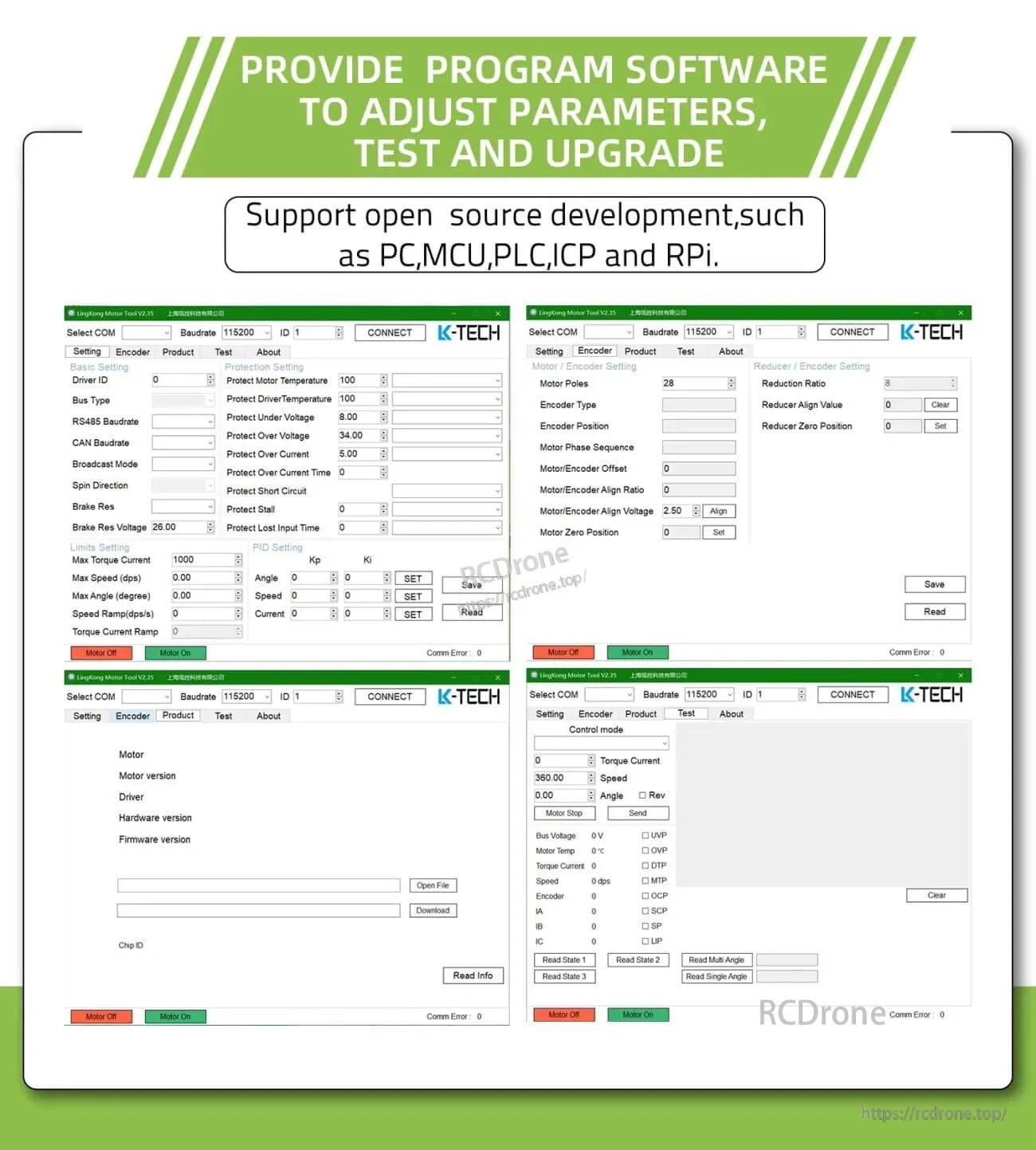
Программное обеспечение для конфигурации предоставляется для настройки параметров, тестирования и обновлений во время запуска и обслуживания.
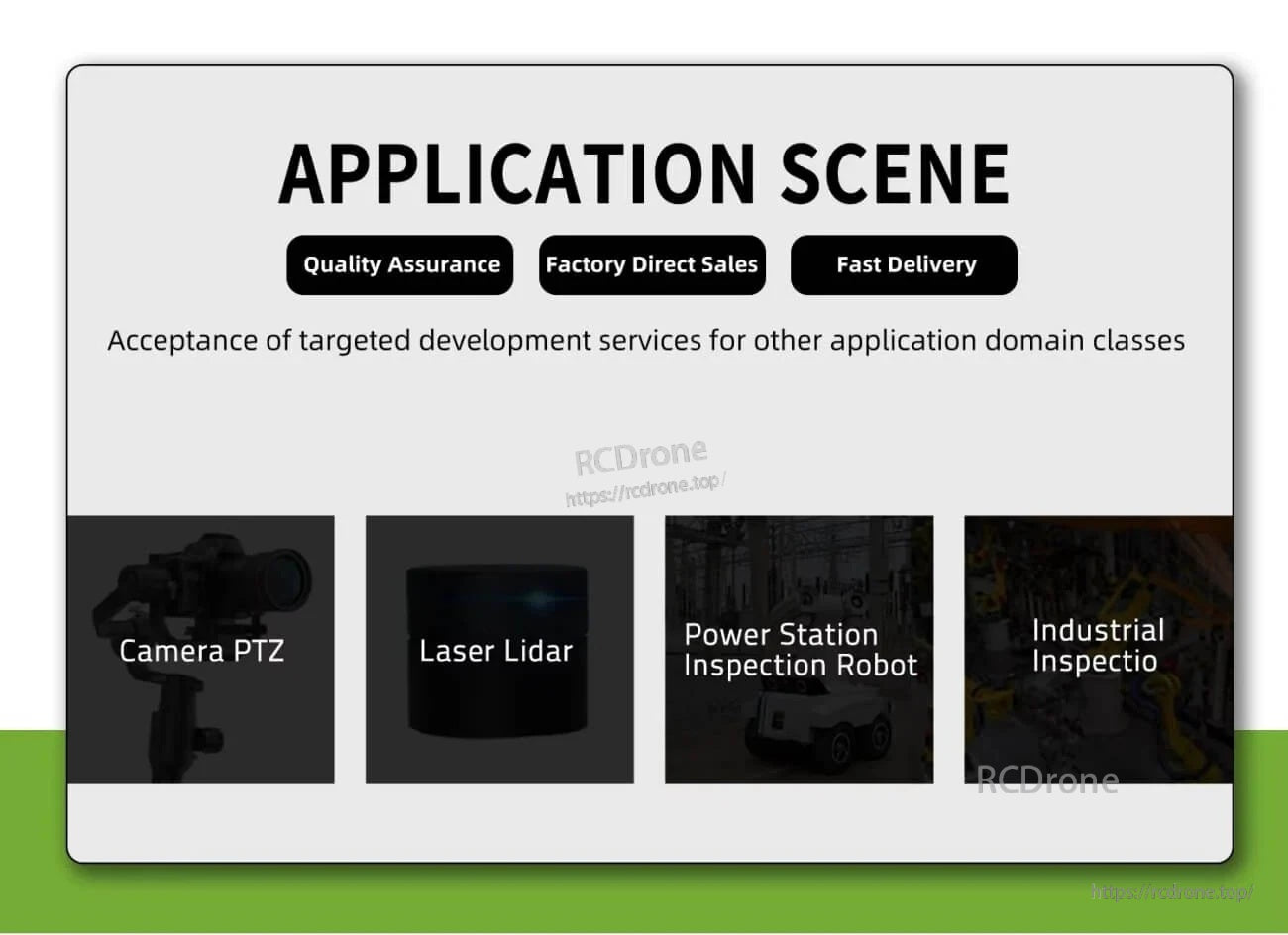
Общие случаи использования включают системы PTZ и лидар, а также инспекционные роботы и другие проекты мобильной автоматизации.
Related Collections



