




Бесщеточный мотор LKMTECH MG4005-V2 с редуктором 1:10 PG4210, RS485/CAN, 18-битный энкодер
Бесщеточный мотор LKMTECH MG4005-V2 с редуктором 1:10 PG4210, RS485/CAN, 18-битный энкодер
LKMTECH
Не удалось загрузить сведения о доступности самовывоза
Обзор
Модуль мотора LKMTECH MG4005-V2 является бесщеточным мотором, предназначенным для активации в робототехнике. Он интегрирует планетарный редуктор PG4210 (1:10) и 18-битный магнитный энкодер, с коммуникацией через RS485 или CAN для управления крутящим моментом/скоростью/позицией в замкнутом контуре.
Ключевые особенности
- Бесщеточный мотор высокой мощности
- Планетарный редуктор высокой точности: люфт ≤10 угловых минут, передаточное отношение 1:10
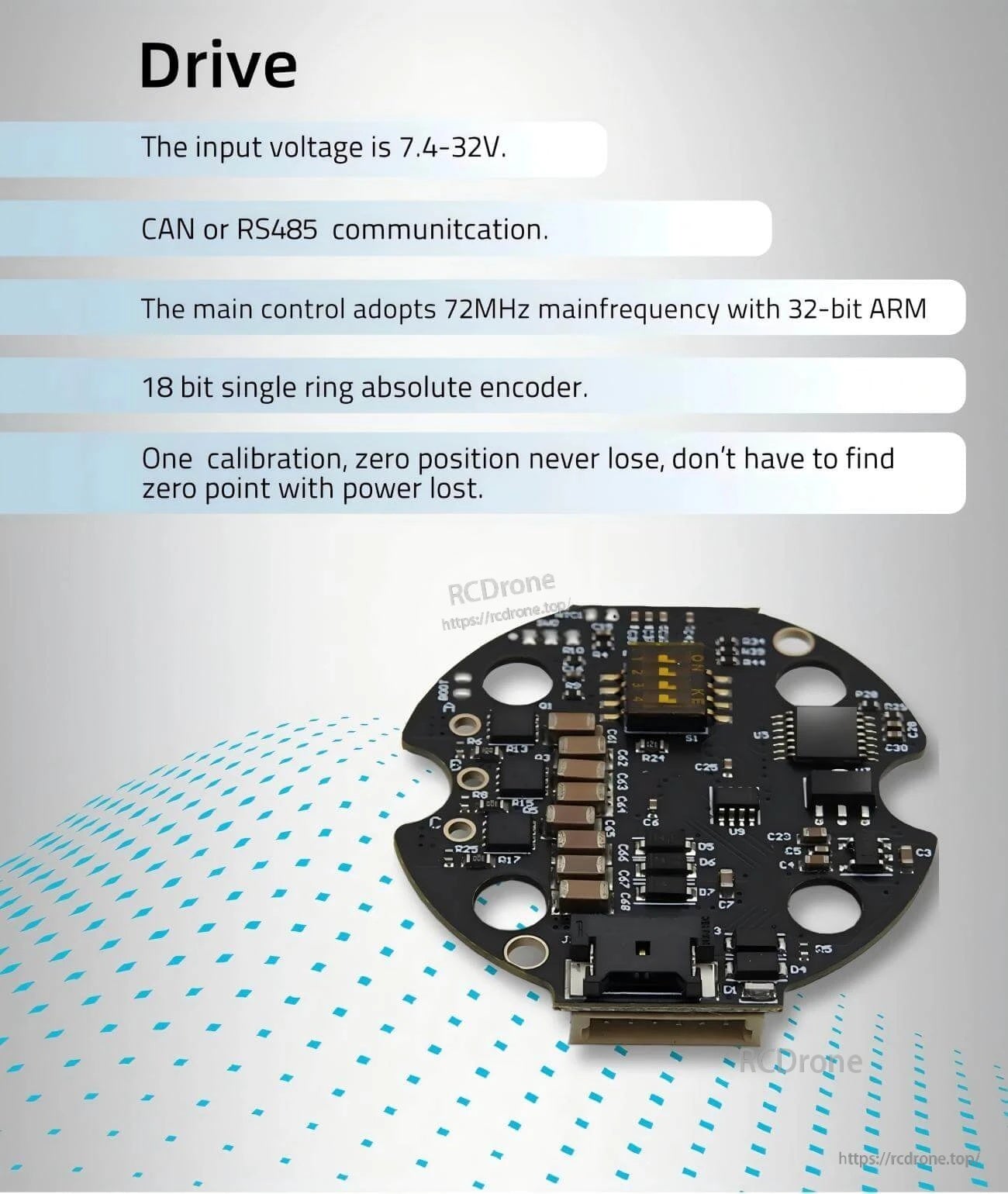
- 18-битный абсолютный энкодер с одним кольцом; одна калибровка, нулевая позиция сохраняется после отключения питания
- Коммуникация: CAN или RS485
- Входное напряжение привода: 7.4-32V
- Основной контроллер: основная частота 72 МГц с 32-битным ARM
- Поддерживает PWM-вход; оптимизированный крутящий момент двигателя для более плавной работы
- Поддержка программного обеспечения для инструментов двигателя: настройка параметров, тестирование и обновление прошивки
- Поддерживает платформы для разработки с открытым исходным кодом, такие как ПК, MCU, PLC, ICP и RPi
Технические характеристики
| Название товара | MG4005-V2 |
| Номинальное напряжение | 24В |
| Максимальная скорость | 320 об/мин |
| Номинальная скорость | 255 об/мин |
| Номинальный крутящий момент | 1Н·м |
| Максимальный крутящий момент | 2.5Н·м |
| Номинальный ток | 1.8A |
| Максимальная мощность | 65Вт |
| Постоянная скорость | 106.3об/мин/В |
| Крутящий момент | 0.06Н.м/А |
| Обороты | 28 |
| Тип обмотки | Y |
| Сопротивление фазы | 1.4Ω |
| Индуктивность фазы | 0.5мГн |
| Полюса мотора | 28 |
| Инерция ротора | 140гсм² |
| Температура мотора | ДА |
| Тип редуктора | PG4210 |
| Передаточное отношение | 1:10 |
| Зазор | ≤10 угл.мин |
| Номинальная нагрузка подшипника | 1000Н |
| Вес мотора | 154г |
| Рекомендуемый привод | DF40 |
| Входное напряжение привода | 7.4-32V |
| Связь | RS485 ИЛИ CAN |
| Частота связи | RS485:500Гц(115200бит/с)/CAN:2КГц(1Мбит/с) |
| Энкодер | 18-битный магнитный энкодер |
| Скорость передачи данных энкодера (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1М, 2Мбит/с |
| Скорость передачи данных (CAN) | 1М |
| Режим управления | Контур крутящего момента (24КГц)/Контур скорости (8КГц)/Контур положения (4КГц) |
| Кривая ускорения | Трапециевидное ускорение |
Определение интерфейса
| Интерфейс | Примечание |
|---|---|
| A/L | RS485-A или CAN-L |
| B/H | RS485-B или CAN-H |
| V- | Отрицательное питание |
| V- | Отрицательное питание |
| V+ | Положительное питание |
| V+ | Положительное питание |
| T | UART передатчик |
| R | UART приемник |
| G | Сигнальный GND |
Применения
- Человекообразные роботы
- Роботизированные руки
- Экзоскелеты / носимые роботы
- Четвероногие роботы / робот-собака
- AGV транспортные средства / AGV автомобиль
- ARU роботы
Руководства
Для проводки, интеграции и послепродажной поддержки, свяжитесь с https://rcdrone.top/ или напишите на электронную почту [email protected] .
Детали

Созданный для активации робототехники, MG4005‑V2 сочетает в себе компактный бесщеточный двигатель и редуктор в одном модуле, который легко интегрировать.
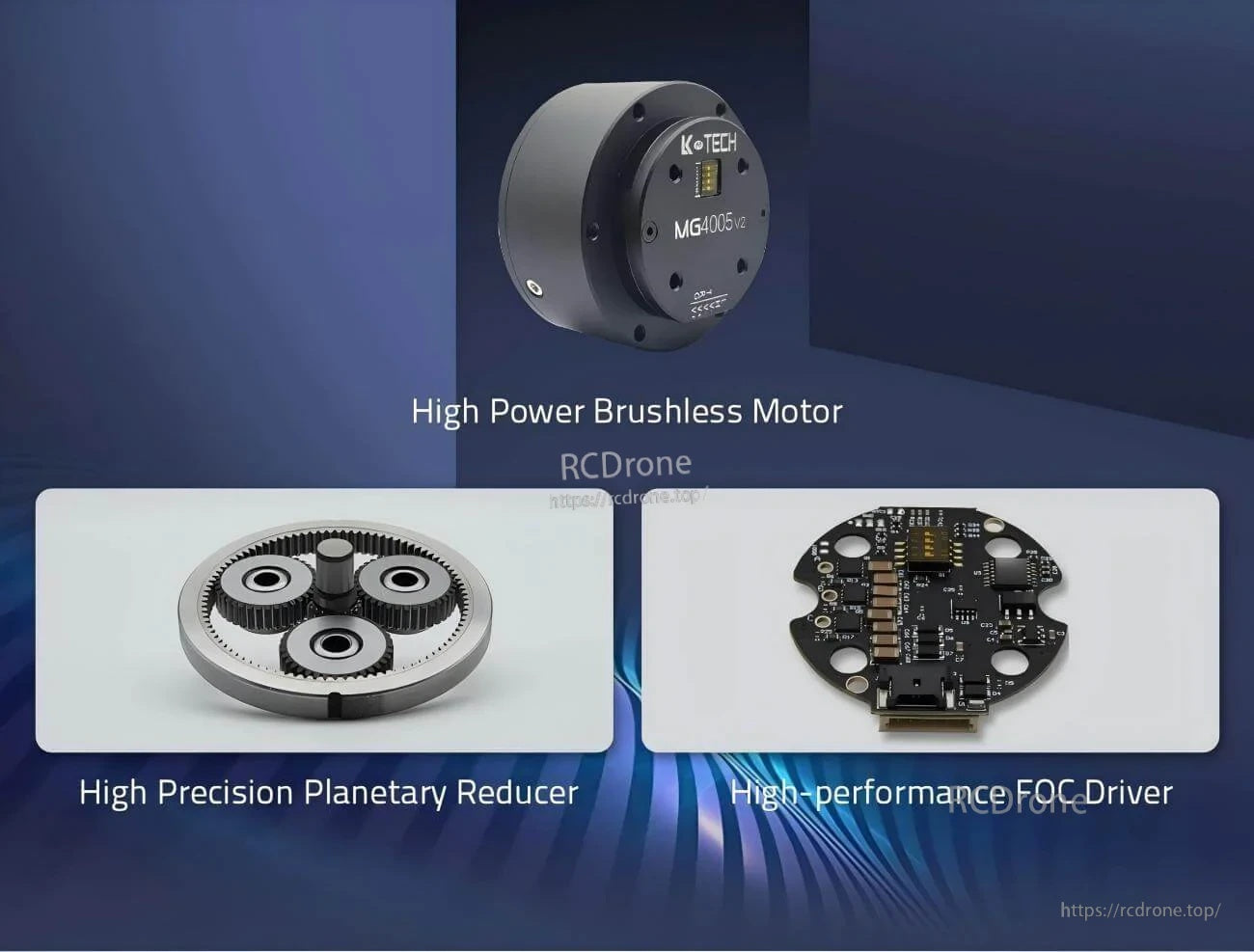
Согласованный двигатель, планетарный редуктор и плата управления помогают упростить замкнутый контроль момента, скорости и положения.
Связь CAN или RS485 и широкий диапазон входного напряжения 7.4–32V делают интеграцию простой для распространенных контроллеров робототехники.

Сравнение версий подчеркивает обновление энкодера MG4005‑V2 до 18-битной абсолютной обратной связи и поддержку входного сигнала PWM.
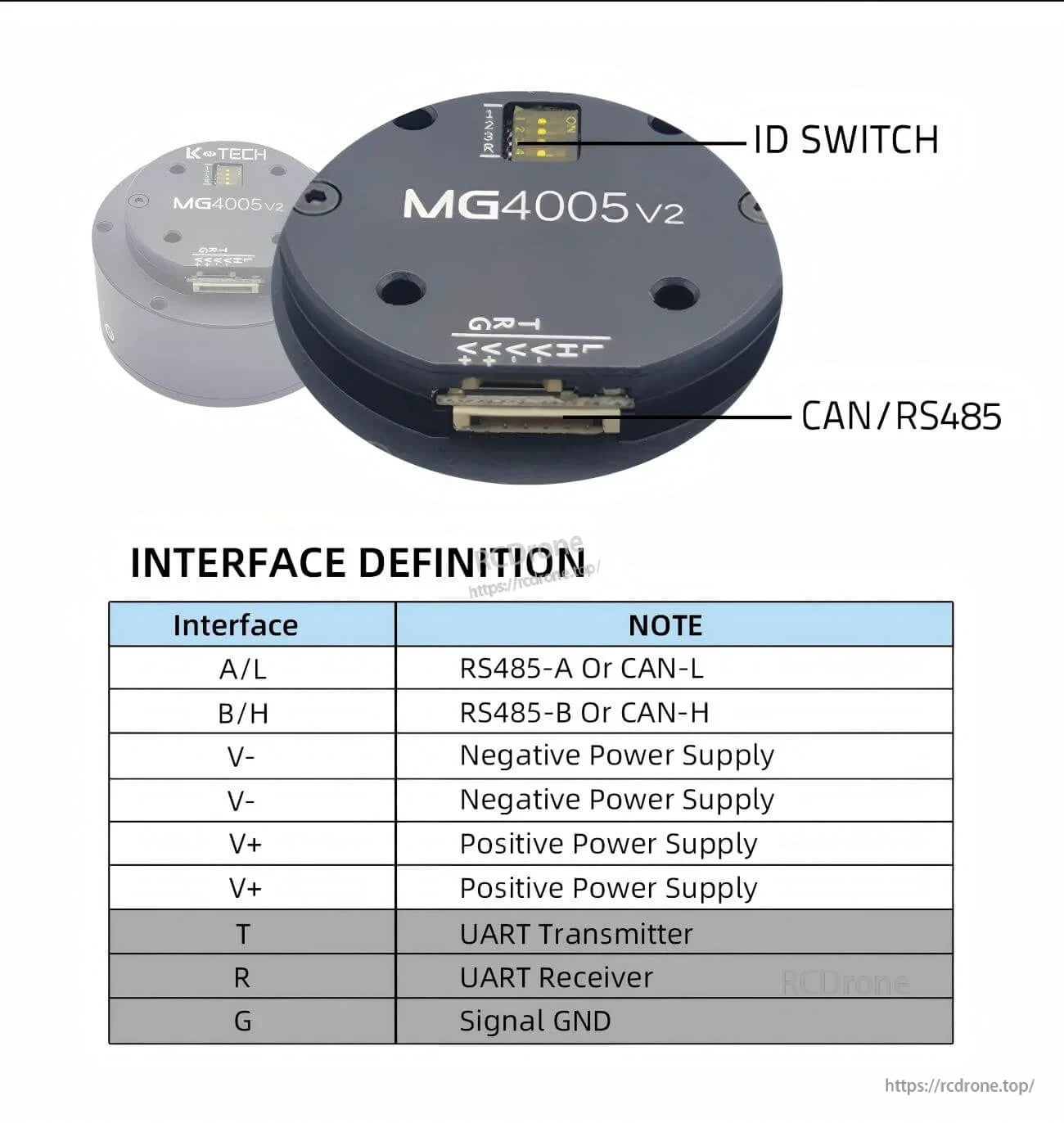
Определения контактов и встроенный переключатель ID помогают упростить проводку многоосевых систем и конфигурацию шины.

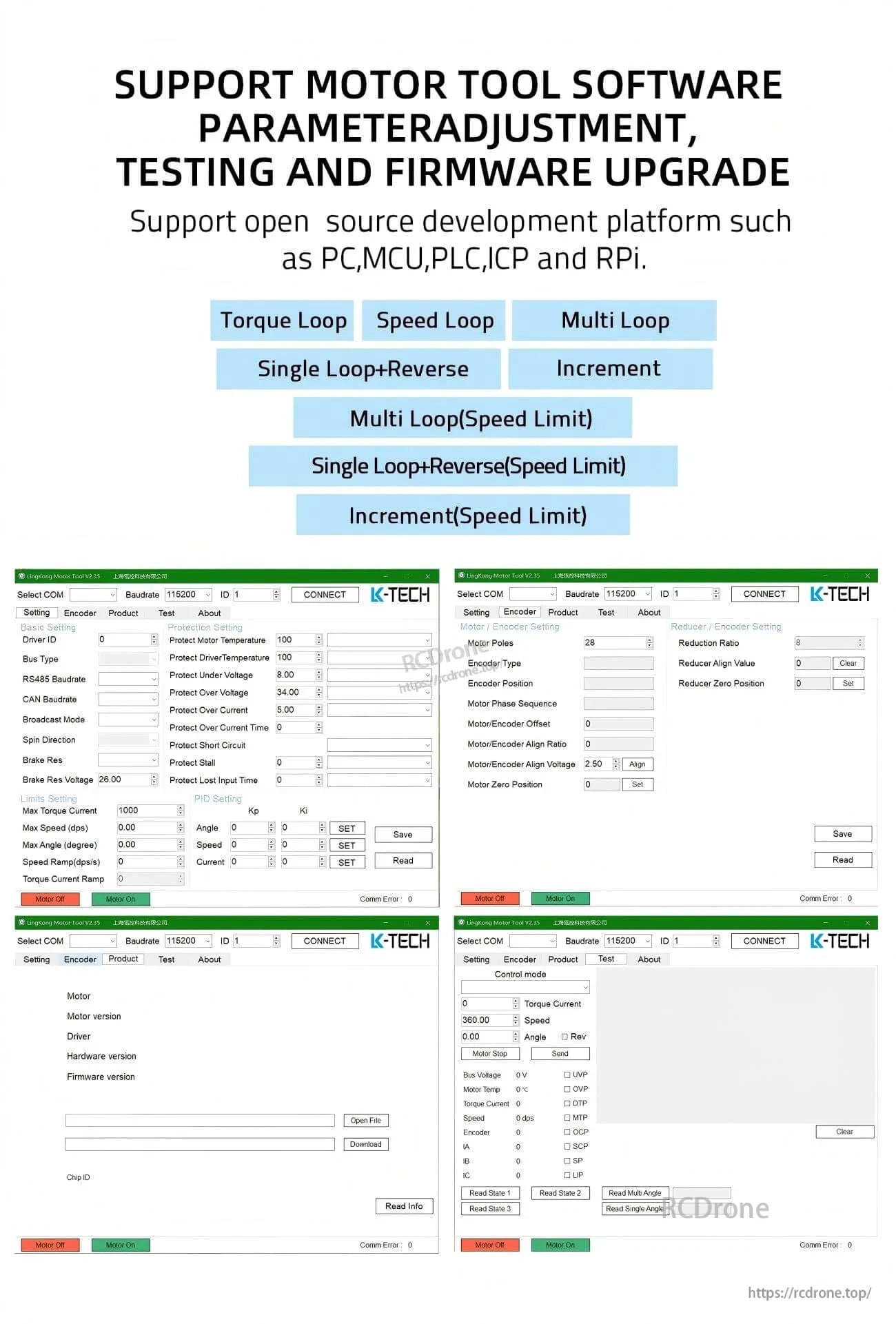
Программное обеспечение для инструментов двигателя поддерживает настройку параметров, тестирование и обновления прошивки во время настройки и обслуживания.

Related Collections




