




LKMTECH MG4005E-i10-V3 планетарный мотор-редуктор, 24В 1:10 PG4210, RS485/CAN двойной энкодер
LKMTECH MG4005E-i10-V3 планетарный мотор-редуктор, 24В 1:10 PG4210, RS485/CAN двойной энкодер
LKMTECH
Не удалось загрузить сведения о доступности самовывоза
Обзор
Мотор LKMTECH MG4005E-i10-V3 является планетарным редукторным мотором , разработанным для роботизированного движения и автоматизации соединений, требующих компактной передачи, замкнутой обратной связи и шины связи. Он интегрирует планетарный редуктор (PG4210, 1:10) и двойные абсолютные магнитные энкодеры (со стороны мотора + со стороны редуктора) для точного управления.
Ключевые особенности
- Планетарный редуктор: высокая мощность, большой крутящий момент и высокая точность
- Бесщеточный мотор + высокоточный планетарный редуктор
- FOC управление (необходим драйв/драйвер)
- Двойные энкодеры: 18-битный абсолютный магнитный энкодер с одним оборотом (сторона мотора) + 14-битный абсолютный магнитный энкодер с одним оборотом (сторона редуктора)
- Энкодер со стороны редуктора поддерживает вывод абсолютного значения одного оборота и запоминает нулевую точку после отключения питания
- RS485 или CAN шина связи
- Поддерживает настройку параметров через программное обеспечение для ПК, тестирование и обновление прошивки
- Поддерживает платформы для разработки с открытым исходным кодом: ПК, МК, ПЛК, промышленный компьютер и Raspberry Pi
- Поддерживаются несколько режимов управления: Режим крутящего момента, Режим скорости, Многооборотный режим управления, Режим позиционирования с одним оборотом + направление, Режим инкрементного позиционирования, Многооборотный режим управления (с ограничением скорости), Режим позиционирования с одним оборотом + направление (с ограничением скорости), Режим инкрементного позиционирования (с ограничением скорости)
- Двойные интерфейсы датчиков температуры контролируют температуры двигателя и привода в реальном времени
- Резервная функция тормоза (Тормоз / Освобождение тормоза)
- Перечислены многофункциональные защитные функции: UVP, OVP, DTP, MTP, OCP, SCP, MSP, LIP
Для поддержки интеграции и подтверждения перед продажей, свяжитесь с https://rcdrone.top/ или отправьте электронное письмо на [email protected].
Спецификации
| Название товара | MG4005E-i10-V3 |
| Номинальное напряжение | 24В |
| Максимальная скорость | 320об/мин |
| Номинальный крутящий момент | 1 N.m |
| Номинальная скорость | 255об/мин |
| Номинальный ток | 1.8A |
| Максимальная мощность | 65Вт |
| Максимальный крутящий момент | 2.5 N.m |
| Константа скорости | 106.3об/мин/В |
| Константа крутящего момента | 0.06 N.m/A |
| Обороты | 28 |
| Тип обмотки | Y |
| Сопротивление фазы | 1.4Ω |
| Индуктивность фазы | 0.5mH |
| Полюса мотора | 28 |
| Инерция ротора | 140gcm² |
| Температура мотора | ДА |
| Тип редуктора | PG4210 |
| Передаточное отношение | 1:10 |
| Зазор | ≤10 угл.мин |
| Номинальная нагрузка подшипника | 1000N |
| Вес мотора | 183g |
| Рекомендуемый привод | DG40E |
| Входное напряжение привода | 7.4-32V |
| Связь | RS485 или CAN |
| Частота связи | RS485: 500Гц (115200bps) / CAN: 2КГц (1Mbps) |
| Энкодер | 18-битный (двигатель) + 14-битный (редуктор) магнитный энкодер |
| Скорость передачи данных энкодера (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Скорость передачи данных (CAN) | 100K, 125K, 250K, 500K, 1M |
| Режим управления | Контур момента (24КГц) / Контур скорости (8КГц) / Контур положения (4КГц) |
| Кривая ускорения | Трапециевидное ускорение |
Определение интерфейса
| Интерфейс | Примечание |
|---|---|
| A/H | RS485-A или CAN-H |
| B/L | RS485-B или CAN-L |
| V- | Отрицательное питание |
| V+ | Положительное питание |
| A/H | RS485-A или CAN-H |
| B/L | RS485-B или CAN-L |
| T | UART передатчик |
| R | UART приемник |
| G | Сигнальный GND |
Применения
- Человекообразные роботы
- Роботизированные руки
- Экзоскелеты / носимые роботы
- Четвероногие роботы / робот-собака
- AGV транспортные средства / AGV автомобиль
- ARU роботы
Руководства / Файлы
Детали

MG4005E-i10-V3 сочетает в себе бесщеточный двигатель с планетарным редуктором в компактной форме для роботизированных суставов и автоматизированных осей.

Двухоборотные абсолютные магнитные энкодеры обеспечивают обратную связь со стороны мотора и выходной стороны, с выделенным переключателем ID для настройки шины.
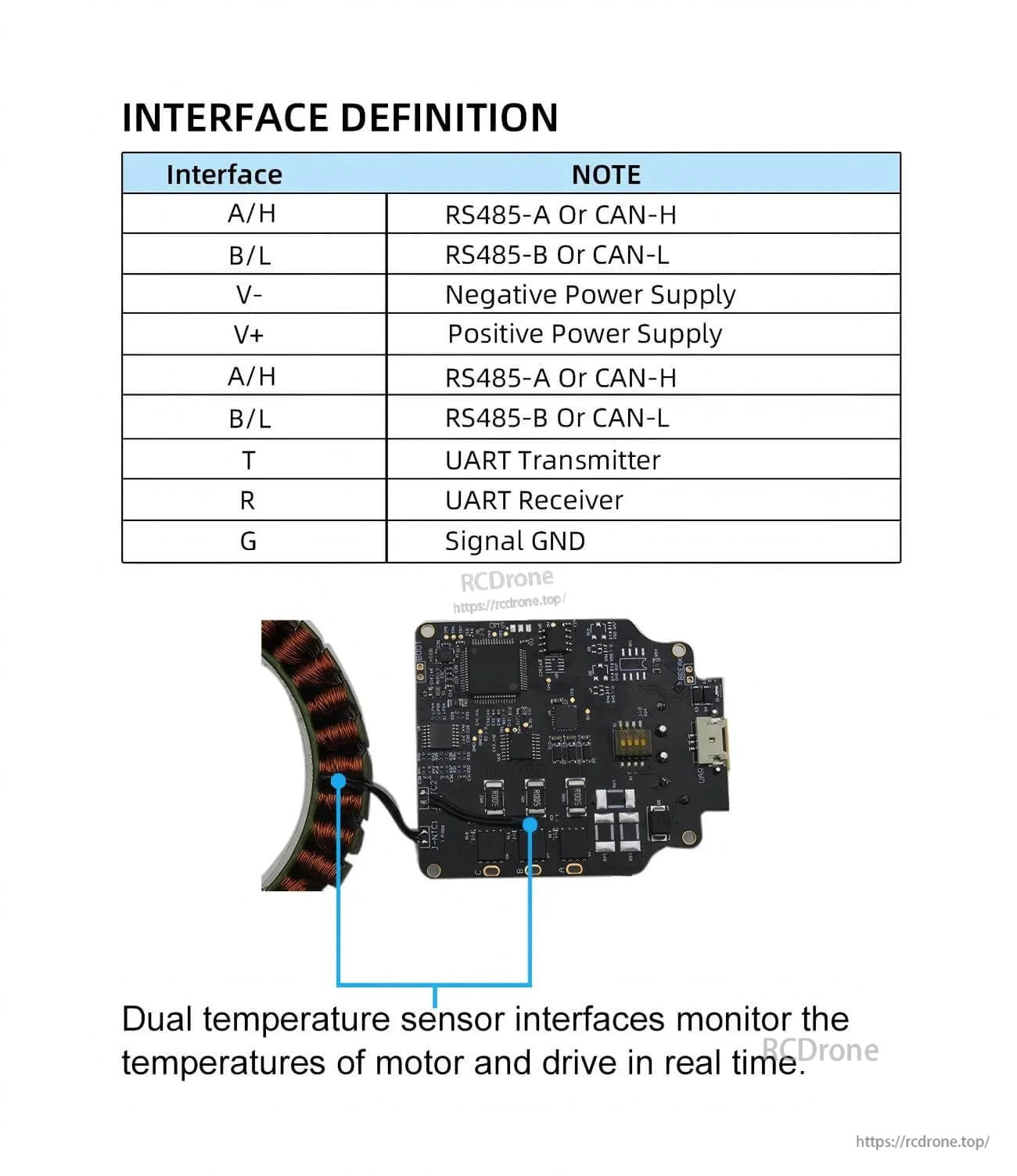
Проводка упрощена благодаря четко определенным клеммам для питания, RS485/CAN связи и соединений сигнала UART.
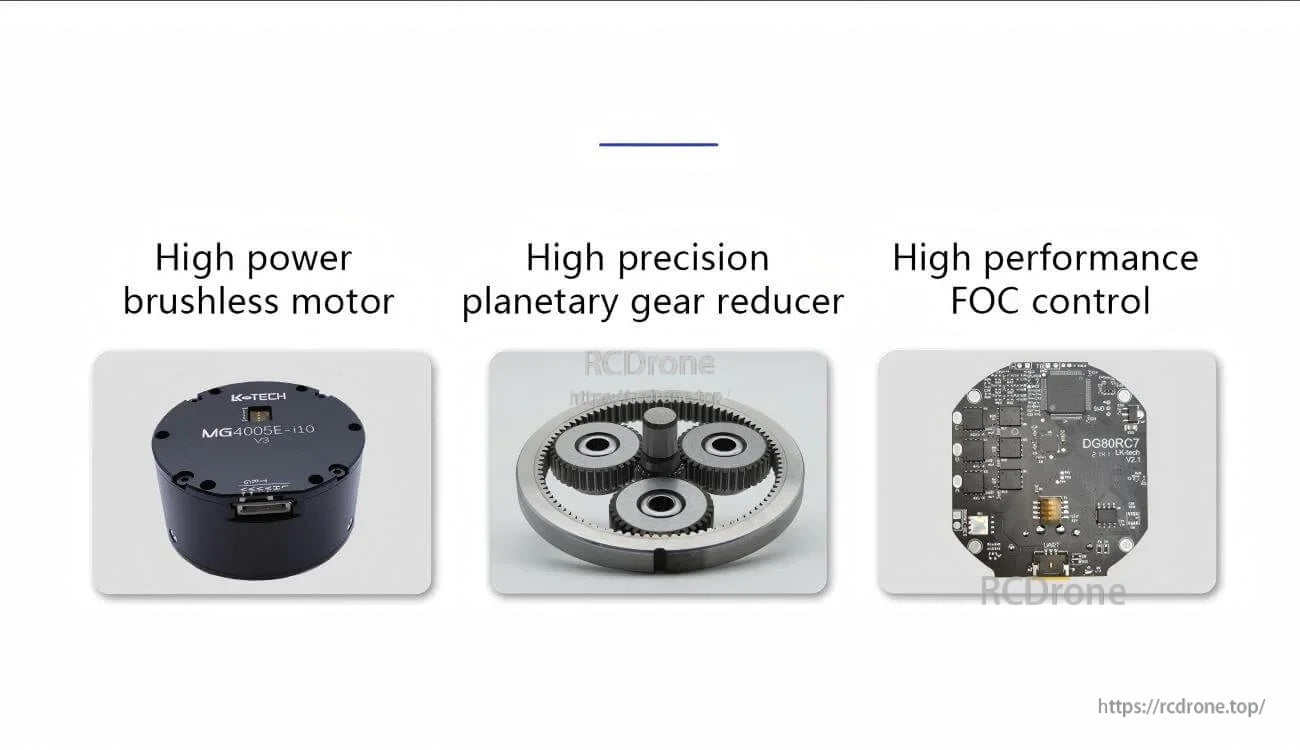
Бесщеточный мотор, прецизионная планетарная передача и управление FOC поддерживают плавную передачу крутящего момента и точное управление движением.

Привод поддерживает RS485 или CAN связь и широкий диапазон входного напряжения (7.4–32V) для гибкой интеграции.
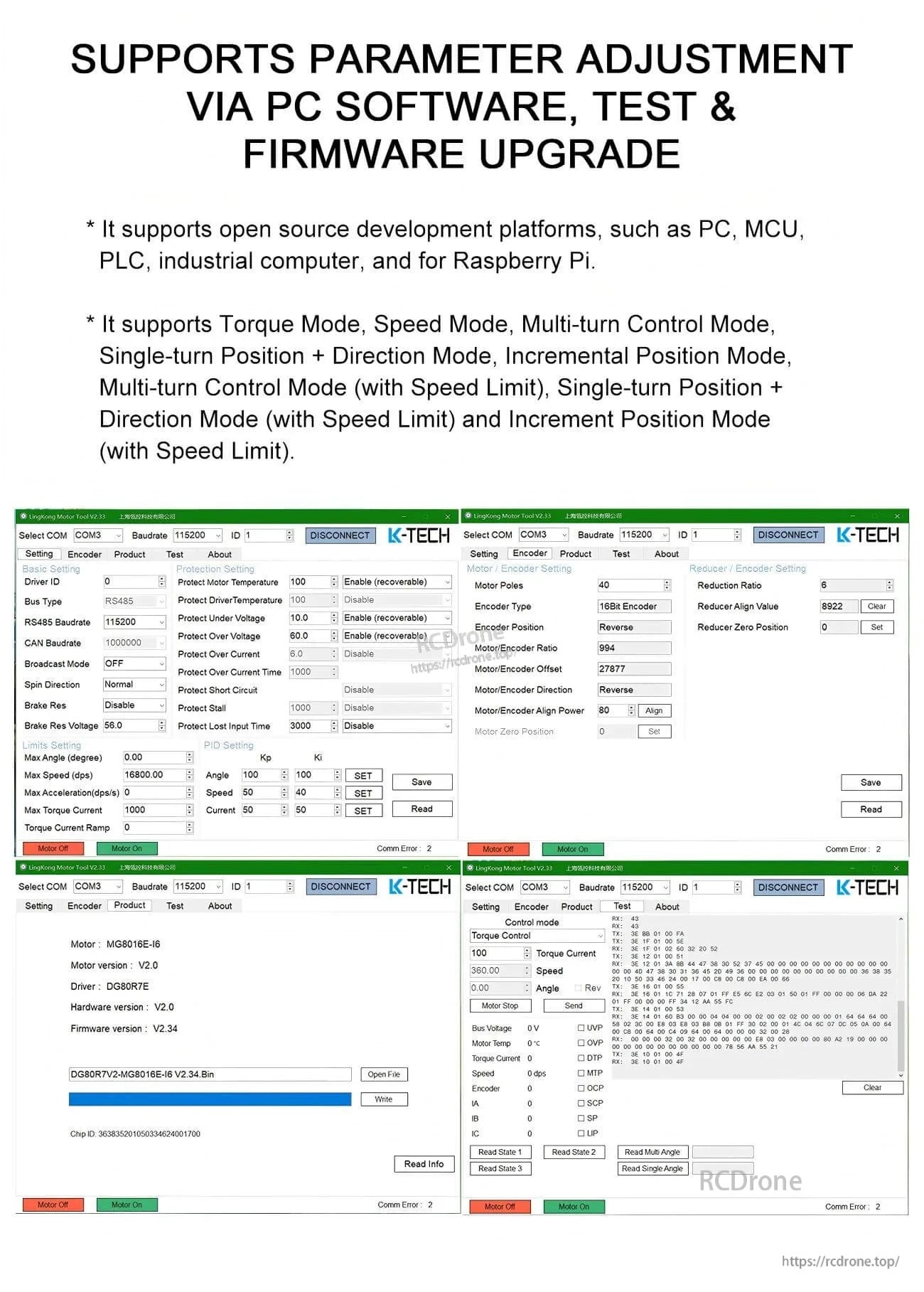
Программное обеспечение для ПК позволяет настраивать параметры, проводить функциональные испытания и обновления прошивки во время пусконаладки и обслуживания.
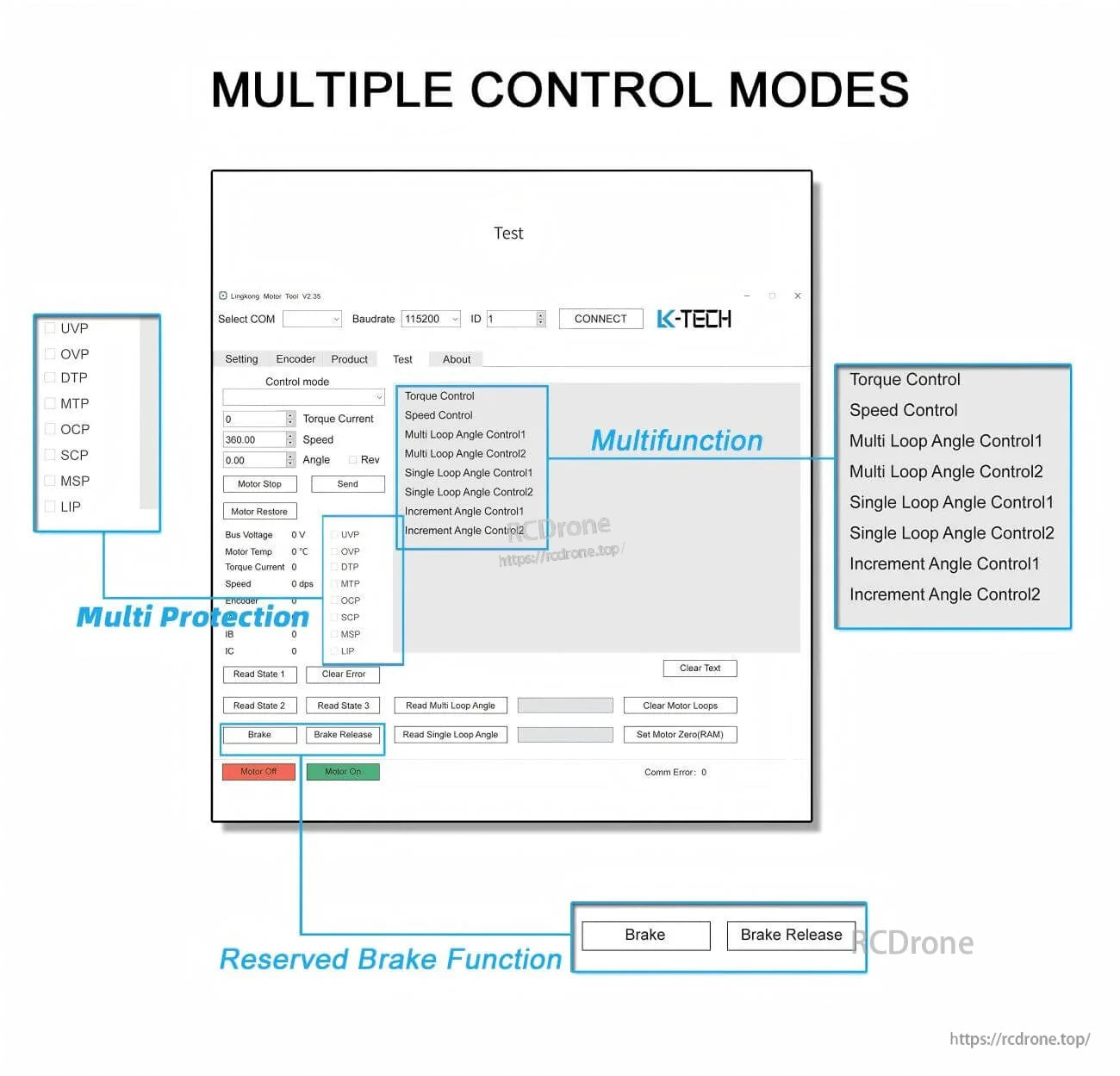
Выбирайте из нескольких режимов управления, таких как управление крутящим моментом, скоростью и положением, с встроенным мониторингом статуса защиты.
Разработано для компактного привода в мобильных роботах, манипуляторах, четвероногих роботах и носимой робототехнике.




