




Двигатель LKMTECH MG4010E-i10-V3 24В 320об/мин 2.5Н·м Планетарный редуктор 1:10 RS485/CAN Энкодер
Двигатель LKMTECH MG4010E-i10-V3 24В 320об/мин 2.5Н·м Планетарный редуктор 1:10 RS485/CAN Энкодер
LKMTECH
Не удалось загрузить сведения о доступности самовывоза
Обзор
Мотор LKMTECH MG4010E-i10-V3 является бесщеточным мотором с планетарным редуктором и абсолютными магнитными энкодерами, разработанным для роботов и автоматизированных приводов, которые требуют высокой точности, большого крутящего момента и стабильного замкнутого управления. Он поддерживает связь по RS485 или CAN-шине и работает с рекомендуемым приводом DG40E (входное напряжение 7.4-32V).
Ключевые особенности
- Высокий стандарт дизайна; высокая мощность, большой крутящий момент, высокая точность
- Высокомощный бесщеточный мотор + высокоточный планетарный редуктор
- Высокопроизводительный FOC контроль (функция, связанная с приводом)
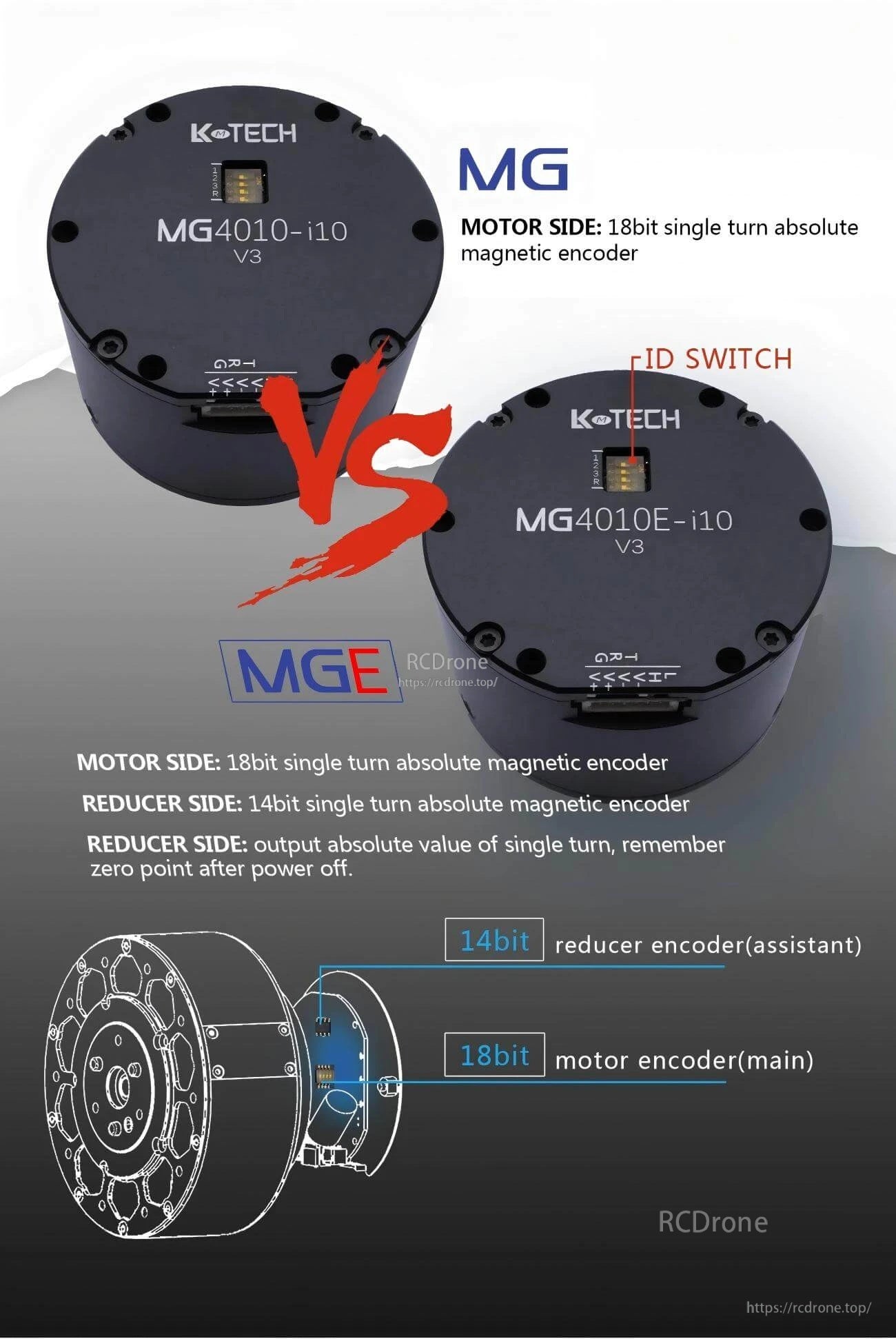
- Двойные энкодеры; запоминает нулевую точку после отключения питания (абсолютное значение для одного оборота)
- Энкодер на стороне мотора: 18-битный абсолютный магнитный энкодер на один оборот
- Энкодер на стороне редуктора: 14-битный абсолютный магнитный энкодер на один оборот
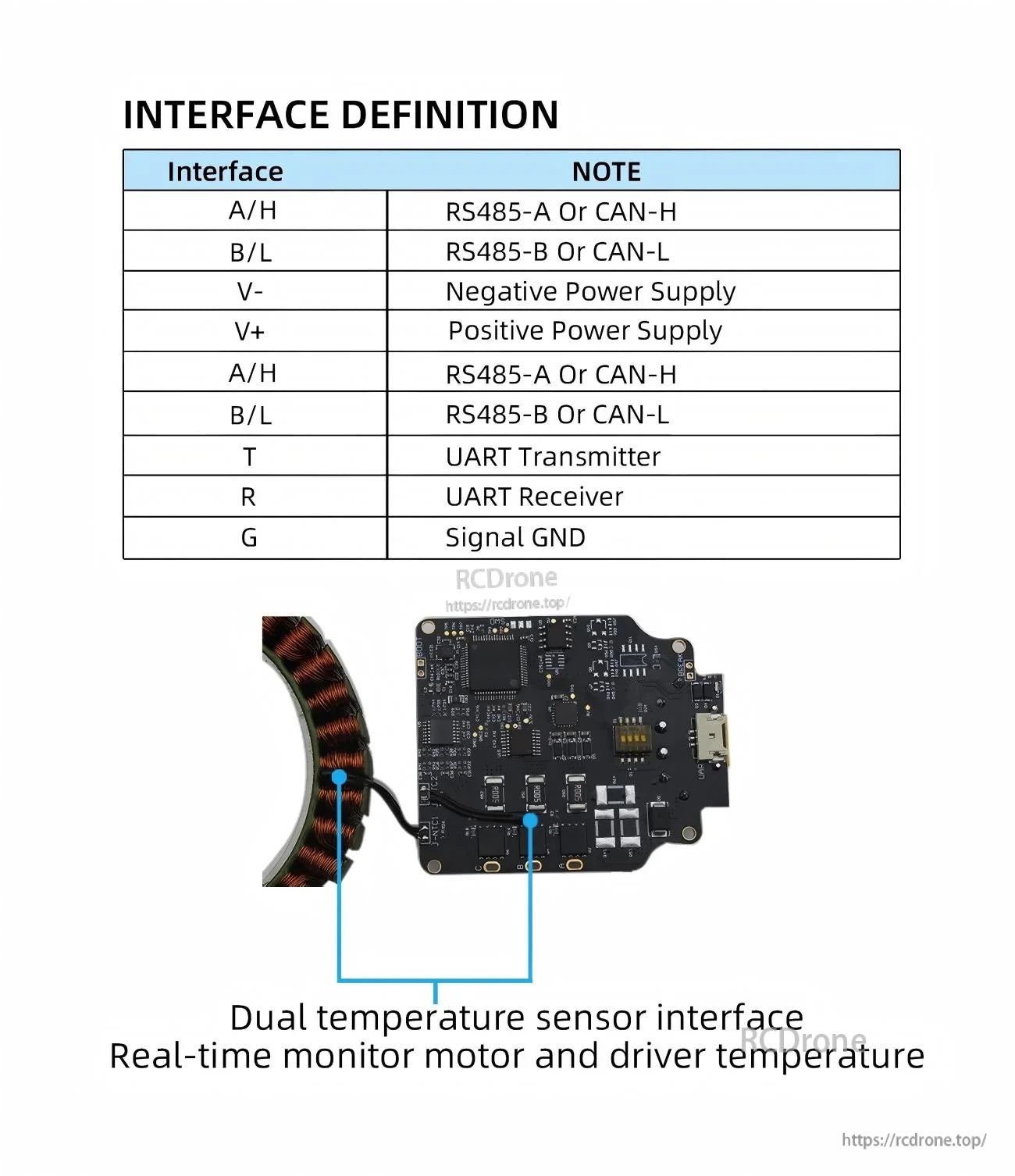
- Двойной интерфейс температурного датчика для мониторинга температуры мотора и драйвера в реальном времени (температура мотора: ДА)
- Переключатель ID (показан на корпусе мотора)
Технические характеристики
| Название товара | MG4010E-i10-V3 |
| Номинальное напряжение | 24В |
| Максимальная скорость | 320 об/мин |
| Номинальная скорость | 260 об/мин |
| Рейтинг крутящего момента | 2.5N.м |
| Максимальный крутящий момент | 4.5N.м |
| Номинальный ток | 3.5A |
| Максимальная мощность | 140W |
| Постоянная скорости | 108.3об/мин/В |
| Постоянная крутящего момента | 0.07N.м/А |
| Обороты | 14 |
| Тип обмотки | Y |
| Сопротивление фазы | 0.604Ω |
| Индуктивность фазы | 0.28mH |
| Полюса мотора | 28 |
| Инерция ротора | 202gcm² |
| Температура мотора | ДА |
| Тип редуктора | PG4210 |
| Передаточное отношение | 1:10 |
| Зазор | ≤8 угл. мин (текст на изображении также указывает: зазор шестерни 6 угл. мин) |
| Номинальная нагрузка подшипника | 1000N |
| Вес мотора | 250g |
| Размер | Φ53*41 |
| Рекомендуемый привод | DG40E |
| Входное напряжение привода | 7.4-32V |
| Связь | RS485 ИЛИ CAN |
| Частота связи | RS485:500Гц(115200бит/с)/CAN:2КГц(1Мбит/с) |
| Энкодер | 18бит(двигатель)+14бит(редуктор)магнитный энкодер |
| Скорость передачи данных энкодера (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1М, 2Мбит/с |
| Скорость передачи данных (CAN) | 100К, 125К, 250К, 500К, 1М |
| Режим управления | Контур момента (24КГц)/Контур скорости (8КГц)/Контур положения (4КГц) |
| Кривая ускорения | Трапециевидное ускорение |
Определение интерфейса
| A/H | RS485-A Или CAN-H |
| B/L | RS485-B Или CAN-L |
| V- | Отрицательное питание |
| V+ | Положительное питание |
| А/Ч | RS485-A или CAN-H |
| Б/Л | RS485-B или CAN-L |
| Т | UART передатчик |
| Р | UART приемник |
| Г | Сигнальный GND |
Сценарии применения
- Человекообразные роботы
- Роботизированные руки
- Экзоскелеты
- Четвероногие роботы
- AGV транспортные средства / AGV автомобиль
- ARU роботы
- Робот-собака
- Носимый робот
По вопросам интеграции (настройки RS485/CAN, выбор скорости передачи энкодера или соответствие приводов) свяжитесь с [email protected] or посетите https://rcdrone.top/.
Руководства
Детали

Создан для робототехнических актуаторов, которым необходимы высокий крутящий момент, высокая точность и стабильное замкнутое управление.

Поддержка связи по RS485 или CAN-шине обеспечивает гибкую интеграцию с общими контроллерами и приводами роботов.
Двойные абсолютные энкодеры (двигатель + редуктор) помогают сохранить нулевую точку после отключения питания для повторяемого позиционирования.
Определения контактов упрощают подключение питания и выбор связи RS485/CAN во время интеграции.

Планетарный редуктор 1:10 оптимизирован для компактного крутящего момента в ограниченных актуатор пространствах.
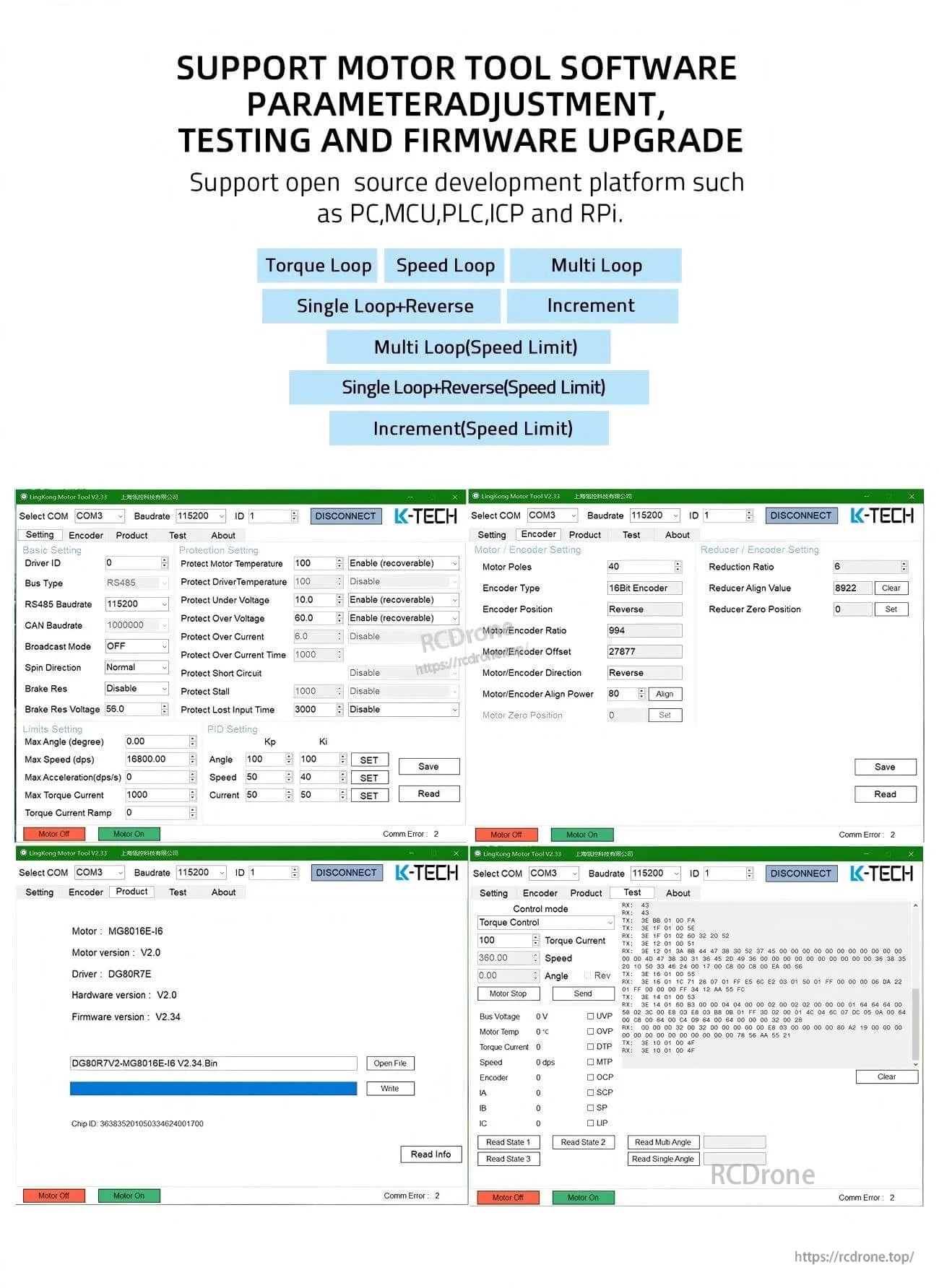
Программное обеспечение для ПК поддерживает настройку параметров, функциональное тестирование и обновление прошивки во время пусконаладки.
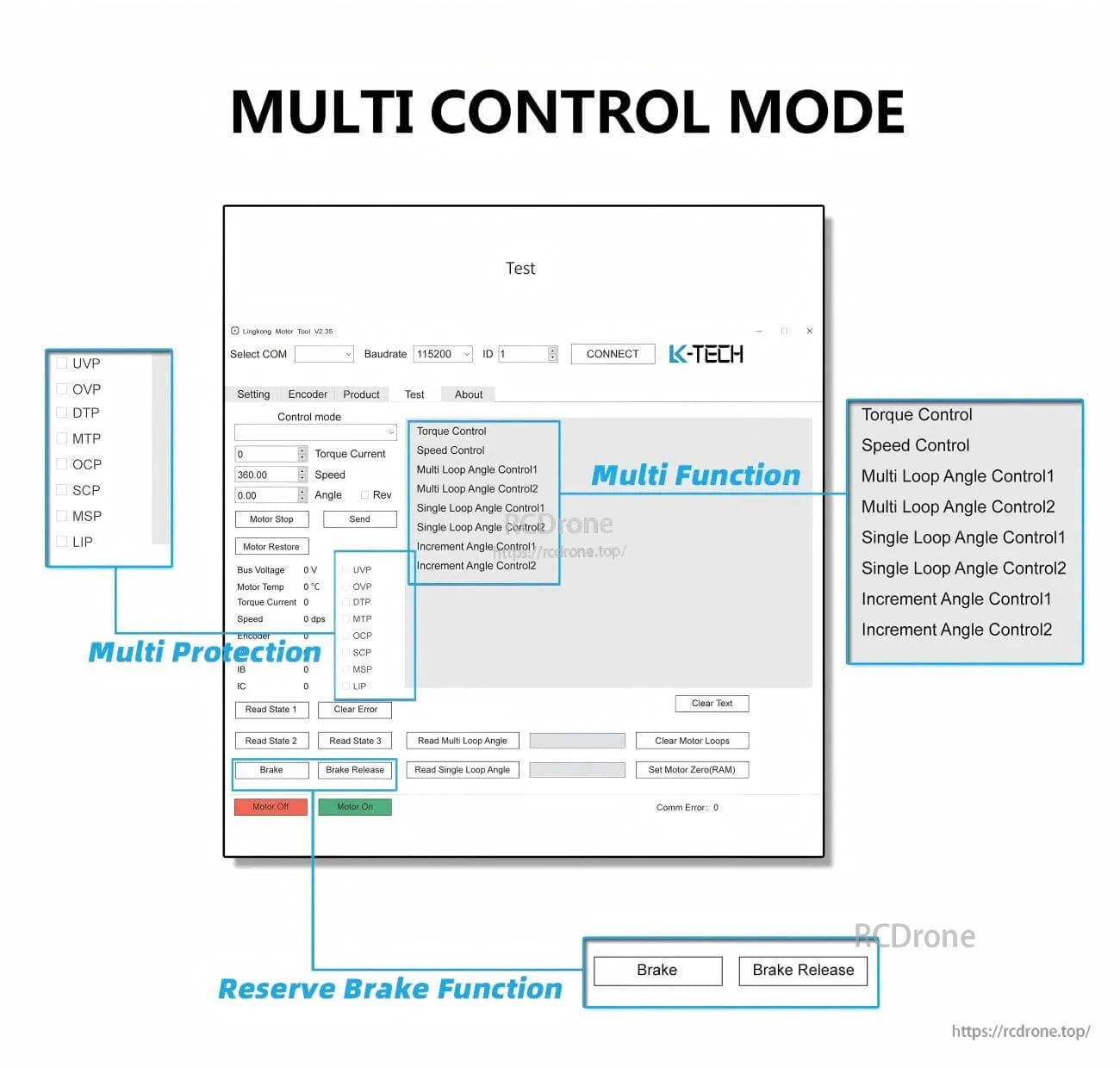
Несколько режимов управления и опции защиты поддерживают рабочие процессы крутящего момента, скорости и положения.
Подходит для AGV, роботизированных рук, четвероногих роботов и суставов носимых роботов, где требуется точная передача и обратная связь.
Related Collections




