




LKMTECH MG4010E-i36-V3 планетарный редукторный мотор 24В 1:36 RS485/CAN магнитный энкодер для робототехники
LKMTECH MG4010E-i36-V3 планетарный редукторный мотор 24В 1:36 RS485/CAN магнитный энкодер для робототехники
LKMTECH
Не удалось загрузить сведения о доступности самовывоза
Обзор
Мотор LKMTECH MG4010E-i36-V3 является планетарным редукторным мотором , разработанным для робототехники и приводов управления движением. Он сочетает в себе бесщеточный мотор, планетарный редуктор и магнитный энкодер, с вариантами связи, указанными как RS485 или CAN.
Ключевые особенности
- Планетарный редукторный мотор (MG4010E-i36, V3).
- Передаточное отношение: 1:36 (также указано как “Передаточное отношение 1:36”).
- Зазор в передаче: 7 угловых минут (метка на изображении) / 12 угловых минут (таблица спецификаций).
- Энкодер: 18-битный абсолютный магнитный энкодер с одним оборотом (текст на изображении); также указан как 18 бит (мотор) + 14 бит (редуктор) магнитный энкодер (таблица спецификаций).
- Связь: RS485 или CAN.
- Управляющий/FOC драйвер упоминается (текст на изображении: “Драйвер FOC высокой производительности”).
- Встроенный тормоз (текст на изображении/метка интерфейса).
- Поддерживаются параметры хоста/тесты/обновления прошивки (текст на изображении).
Спецификации
| Название товара | MG4010E-i36-V3 |
| Номинальное напряжение | 24В |
| Максимальная скорость | 90 об/мин |
| Номинальная скорость | 77 об/мин |
| Номинальный ток | 2.4A |
| Максимальная мощность | 132Вт |
| Номинальный крутящий момент | 6 N.m (таблица спецификаций) / 9 N.m (ярлык изображения) |
| Максимальный крутящий момент | 13 N.m (таблица спецификаций) / 18 N.m (ярлык изображения) |
| Константа скорости | 3 об/мин/В |
| Константа крутящего момента | 2.58 N.m/A |
| Обороты | 14 |
| Тип обмотки | Y |
| Сопротивление фазы | 0.68 Ω |
| Фазовая индуктивность | 0.25 мГн |
| Полюса мотора | 28 |
| Инерция ротора | 158 гсм² |
| Температура мотора | ДА |
| Тип редуктора | PG5336 |
| Передаточное отношение | 1:36 |
| Зазор | ≤12 угл.мин (таблица спецификаций) / 6 угл.мин (ярлык на изображении) |
| Номинальная нагрузка подшипника | 1120 Н |
| Вес мотора | 378 г |
| Рекомендуемый привод | DG40E |
| Входное напряжение привода | 12-24В (таблица спецификаций) / 12-60В (ярлык на изображении) |
| Связь | RS485 ИЛИ CAN |
| Частота связи | RS485: 500 Гц (115200 бит/с) / CAN: 2 кГц (1 Мбит/с) |
| Энкодер | 18бит (двигатель) + 14бит (редуктор) Магнитный энкодер |
| Скорость передачи данных энкодера (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2 Мбит/с |
| Скорость передачи данных (CAN) | 100K, 125K, 250K, 500K, 1M |
| Режим управления | Контур крутящего момента (24 кГц) / Контур скорости (8 кГц) / Контур положения (4 кГц) |
| Кривая ускорения | Трапециевидное ускорение |
| Размер двигателя | Φ 53*54.5 (метка изображения) |
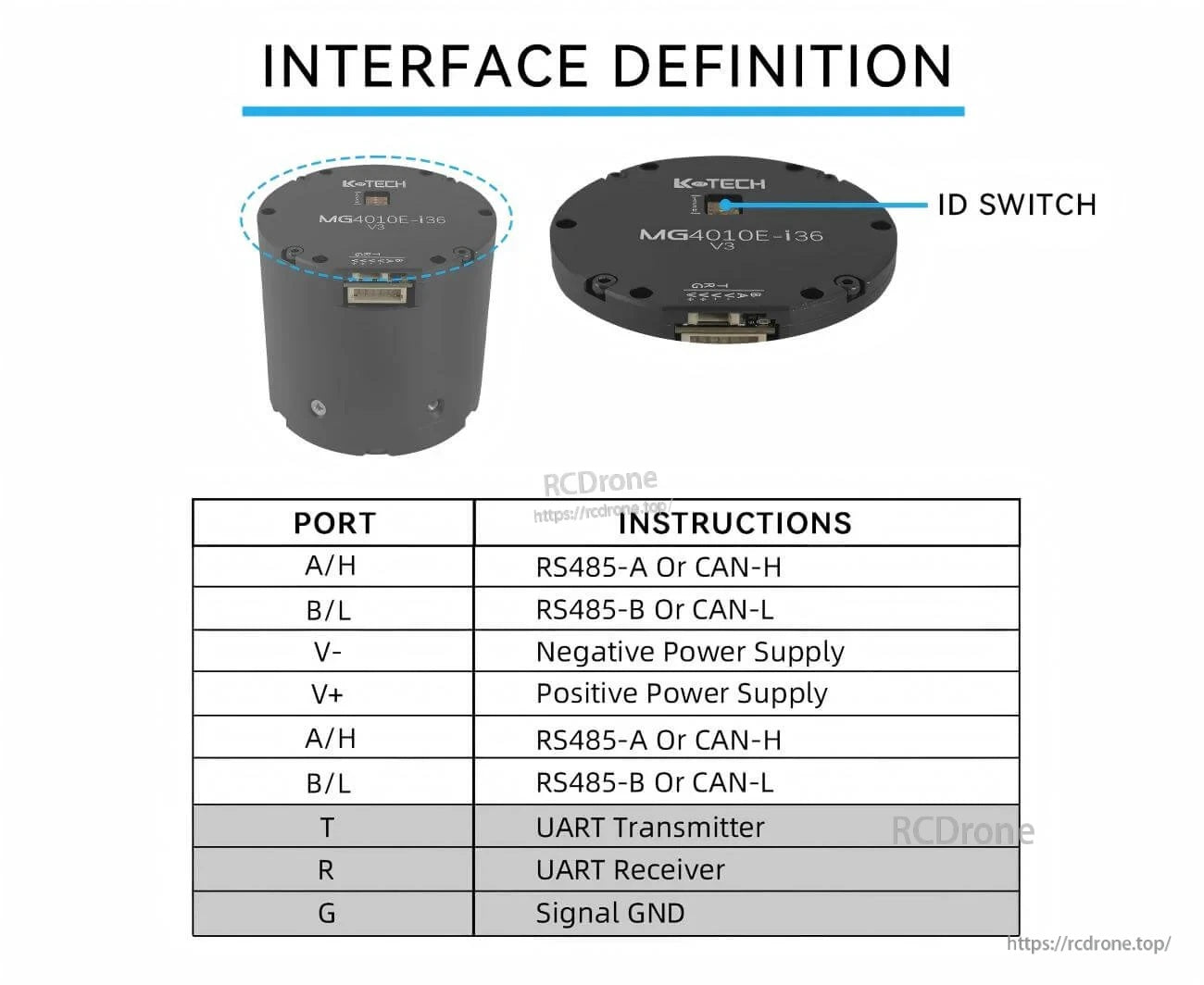
Определение интерфейса
- Переключатель ID (метка изображения: “ID SWITCH”).
| Порт | Инструкции |
|---|---|
| А/Н | RS485-A или CAN-H |
| Б/Л | RS485-B или CAN-L |
| V- | Отрицательное питание |
| V+ | Положительное питание |
| Т | UART Передатчик |
| R | UART Приемник |
| G | Сигнальный GND |
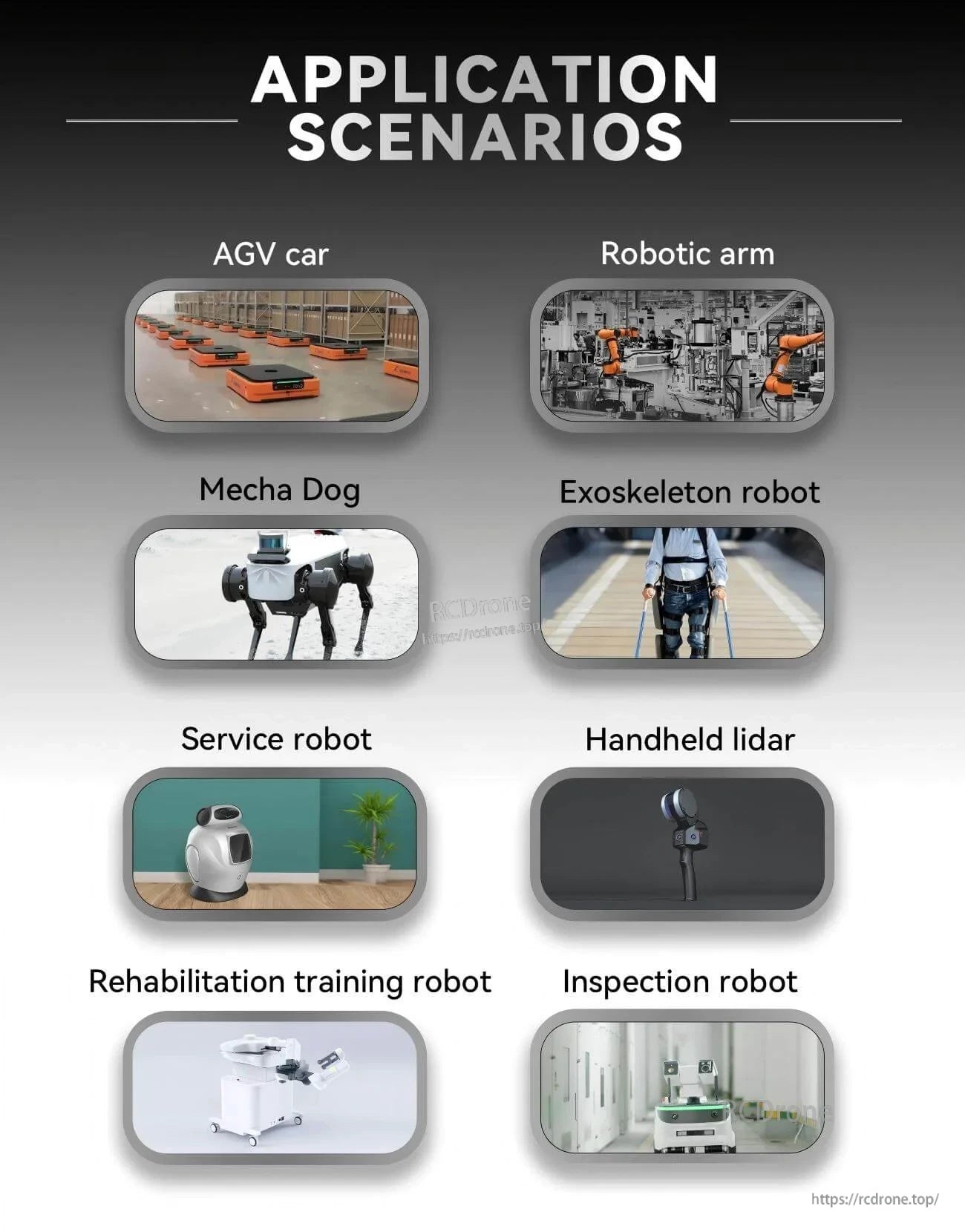
Сценарии применения
- Человекообразные роботы
- Роботизированные руки
- Экзоскелеты
- Четвероногие роботы
- AGV транспортные средства / AGV автомобиль
- ARU роботы
- Меха-собака
- Сервисный робот
- Портативный лидар
- Робот для реабилитационного обучения
- Инспекционный робот
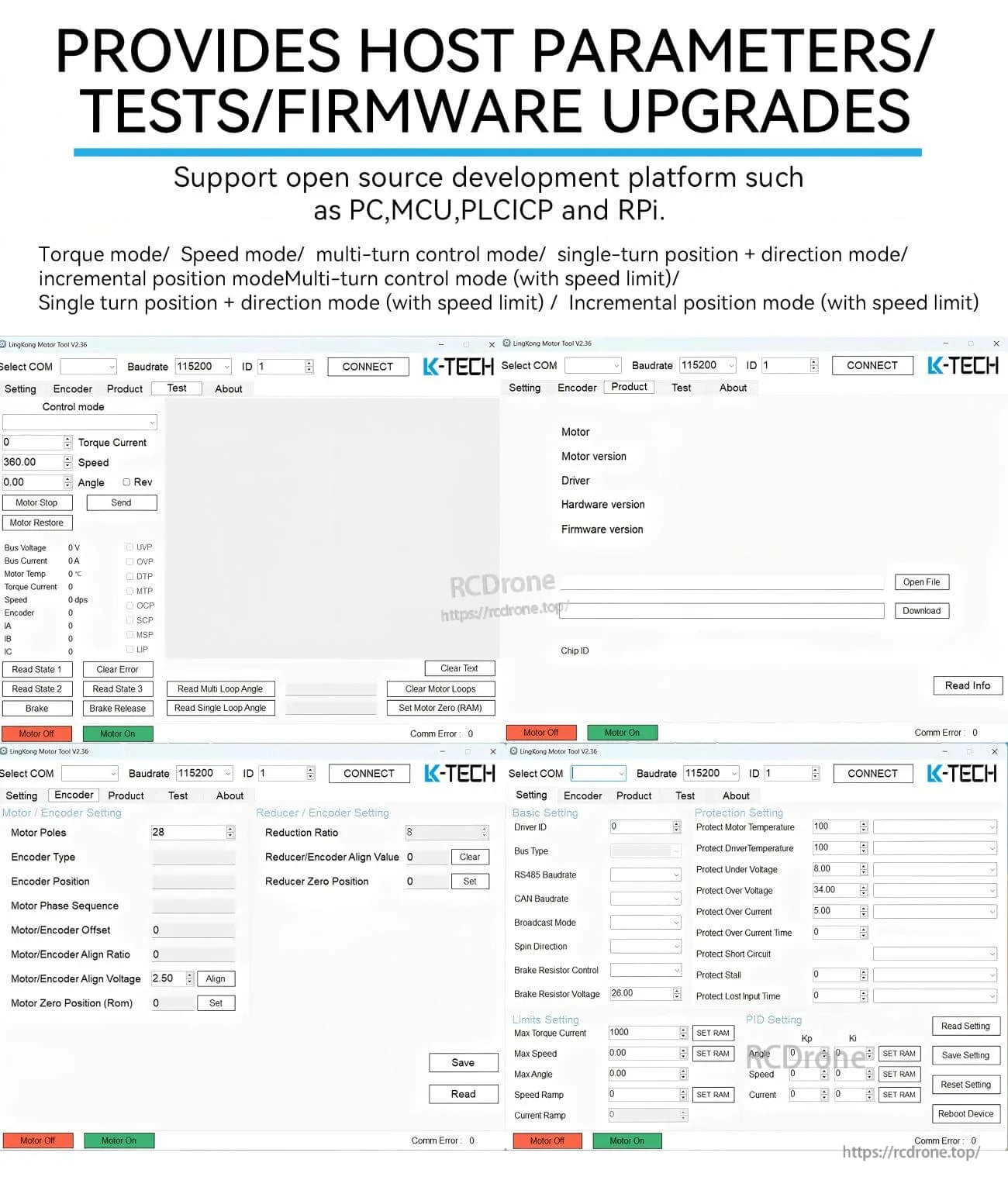
Контроль & Программное обеспечение Заметки
- Поддерживает платформы разработки с открытым исходным кодом, такие как ПК, МК, ПЛК, ИКП и RPi.
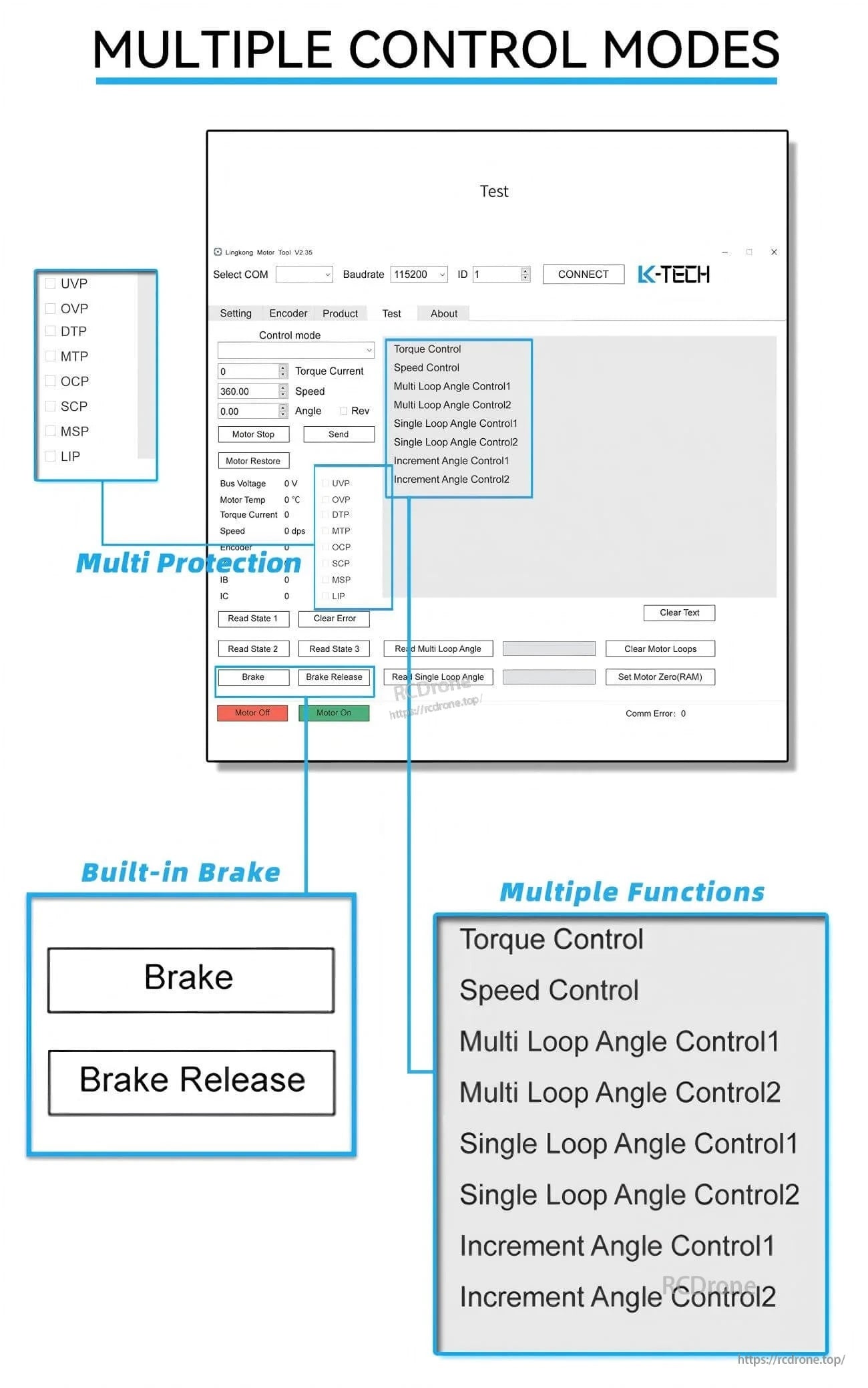
- Перечисленные режимы (текст на изображении): Режим крутящего момента, Режим скорости, Многооборотный режим управления, Режим однооборота + направление, Инкрементный режим позиционирования; также показаны версии с ограничением скорости.
- Несколько режимов управления, показанных в интерфейсе: Управление крутящим моментом, Управление скоростью, Многооборотное управление углом1, Многооборотное управление углом2, Однооборотное управление углом1, Однооборотное управление углом2, Инкрементное управление углом1, Инкрементное управление углом2.
- Показаны многоуровневые защитные метки: UVP, OVP, DTP, MTP, OCP, SCP, MSP, LIP.
- Показаны встроенные элементы управления тормозами: Тормоз, Освобождение тормоза.
Для проверки совместимости перед продажей (интеграция RS485/CAN, выбор скорости передачи) или помощи с доступом к файлам, свяжитесь с [email protected] or посетите https://rcdrone.top/.
Руководства / Документы
Детали

MG4010E-i36-V3 сочетает в себе бесщеточный двигатель, планетарный редуктор и магнитный энкодер для компактных роботизированных актуаторов.
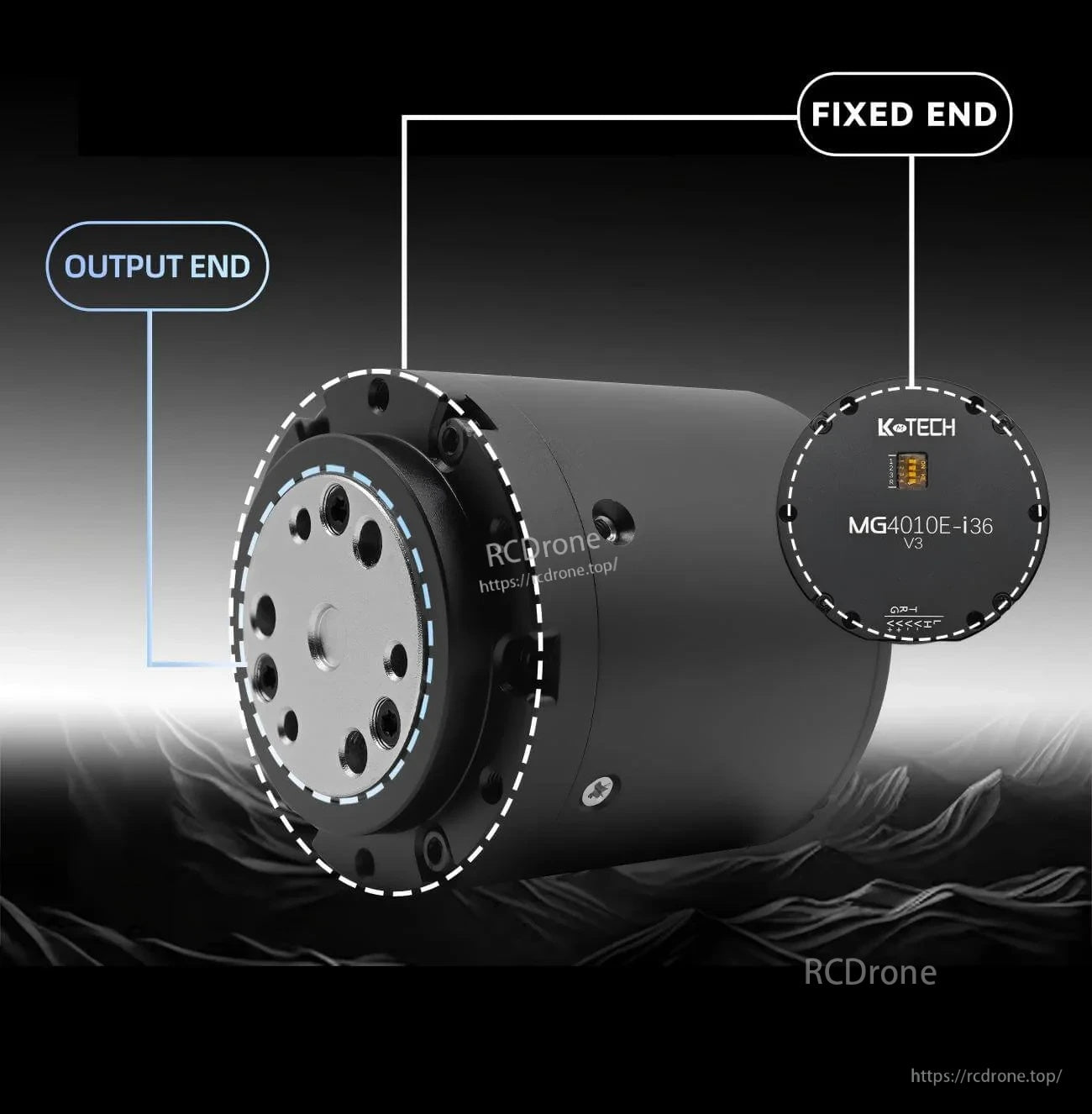
Выходной конец в стиле фланца и фиксированная компоновка упрощают интеграцию в руки, ноги и другие суставные модули.

Связь RS485 или CAN в паре с драйвером FOC и обратной связью абсолютного магнитного энкодера обеспечивает стабильный контроль момента, скорости и положения.
Общие случаи использования включают AGV, роботизированные руки, четвероногие платформы, экзоскелеты и инспекционные или сервисные роботы.
Проводка упрощена с помощью маркированных контактов шины RS485/CAN, подключений питания, UART Tx/Rx, сигнального заземления и встроенного переключателя ID.
Встроенный контроль торможения и несколько режимов работы помогают настроить поведение для различных задач управления движением и требований безопасности.




