Двигатель LKMTECH MG4010E-i36B-V3 24В 1:36 планетарный редуктор с тормозом, RS485/CAN, магнитный энкодер
Двигатель LKMTECH MG4010E-i36B-V3 24В 1:36 планетарный редуктор с тормозом, RS485/CAN, магнитный энкодер
LKMTECH
Не удалось загрузить сведения о доступности самовывоза
Обзор
Мотор LKMTECH MG4010E-i36B-V3 является планетарным редукторным мотором с интегрированным тормозом и обратной связью от энкодера, предназначенным для активации в робототехнике, где требуется точный контроль крутящего момента/скорости/позиции и компактная интеграция. Он поддерживает связь RS485 или CAN и специфицирован с редуктором PG4210 (1:36) и двойным магнитным энкодером (18-битный мотор + 14-битный редуктор).
Ключевые особенности
- Планетарный редуктор: PG4210, передаточное отношение 1:36, люфт ≤12 угловых минут
- Энкодер: 18-битный (мотор) + 14-битный (редуктор) магнитный энкодер
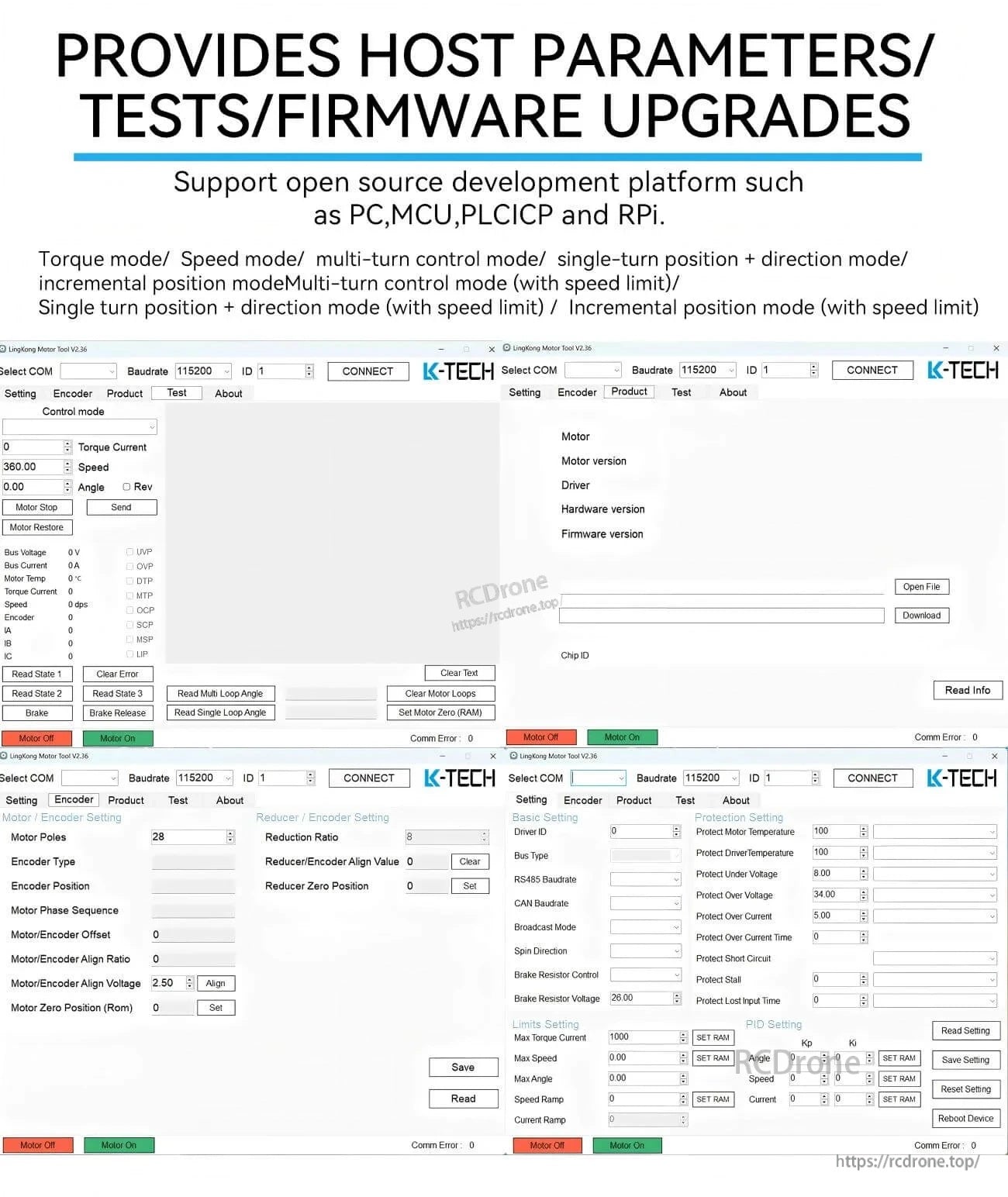
- Связь: RS485 или CAN
- Контрольные петли: Петля крутящего момента (32KHz) / Петля скорости (8KHz) / Петля позиции (4KHz)
- Кривая ускорения: Трапециевидное ускорение
- Тормоз: BG4906, тормозной момент 0.6N.m
- Температура мотора: ДА
Технические характеристики
| Название товара | MG4010E-i36B-V3 |
| Номинальное напряжение | 24В |
| Максимальная скорость | 90 об/мин |
| Номинальная скорость | 77 об/мин |
| Номинальный крутящий момент | 6 Н·м |
| Максимальный крутящий момент | 13 Н·м |
| Номинальный ток | 2.4A |
| Максимальная мощность | 132W |
| Константа скорости | 3 об/мин/В |
| Константа крутящего момента | 2.58 Н·м/А |
| Обороты | 14 |
| Тип обмотки | Y |
| Сопротивление фазы | 0.68Ω |
| Индуктивность фазы | 0.25мГ |
| Полюса мотора | 28 |
| Инерция ротора | 158гсм² |
| Температура мотора | ДА |
| Тип редуктора | PG4210 |
| Передаточное отношение | 1:36 |
| Зазор | ≤12 угл.мин |
| Номинальная нагрузка подшипника | 1120N |
| Вес мотора | 542.5г |
| Тип тормоза | BG4906 |
| Момент торможения (N.m) | 0.6N.м |
| Напряжение запуска (В) | 24В |
| Устойчивое напряжение (В) | 7В |
| Устойчивая мощность (Вт) | 1.4Вт |
| Рекомендуемый привод | DG40E |
| Входное напряжение привода | 7.4-32V |
| Связь | RS485 ИЛИ CAN |
| Частота связи | RS485:500Гц(115200бит/с)/CAN:2КГц(1Мбит/с) |
| Энкодер | 18бит(двигатель)+14бит(редуктор) Магнитный энкодер |
| Скорость передачи данных энкодера (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1М, 2Мбит/с |
| Скорость передачи данных (CAN) | 100К, 125К, 250К, 500К, 1М |
| Режим управления | Контур момента (32КГц)/Контур скорости (8КГц)/Контур положения (4КГц) |
| Кривая ускорения | Трапециевидное ускорение |
Определение интерфейса (Порты)
Значения портов для этой серии двигателей:
- A/H: RS485-A или CAN-H
- B/L: RS485-B или CAN-L
- V-: Отрицательное питание
- V+: Положительное питание
- T: UART Передатчик
- R: UART Приемник
- G: Сигнальный GND
- ID переключатель
Применения
- Человекообразные роботы
- Роботизированные руки
- Экзоскелеты
- Четвероногие роботы
- AGV транспортные средства
- ARU роботы
Руководства / Документы
Для поддержки интеграции и предварительных проверок совместимости, свяжитесь с [email protected] or посетите https://rcdrone.top/.
Детали

Компактный корпус планетарного редуктора интегрирует тормоз и встроенный интерфейс в одном актуаторе.
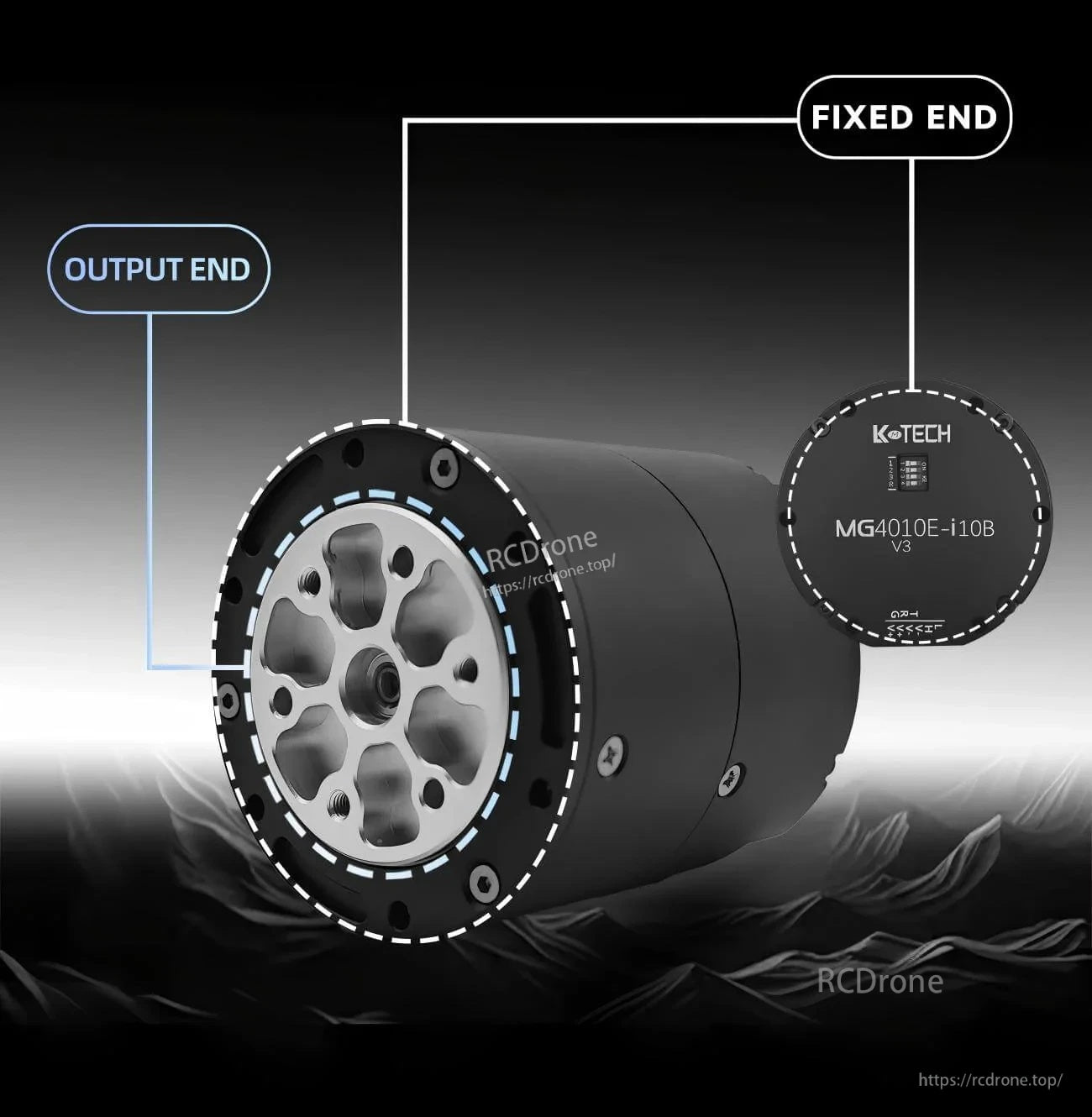
Четко определенный выходной конец и фиксированный конец помогают упростить механическую интеграцию и выравнивание в сборках.

Обратная связь от энкодера и шина связи поддерживают стабильный контроль момента, скорости и положения для суставов роботов.
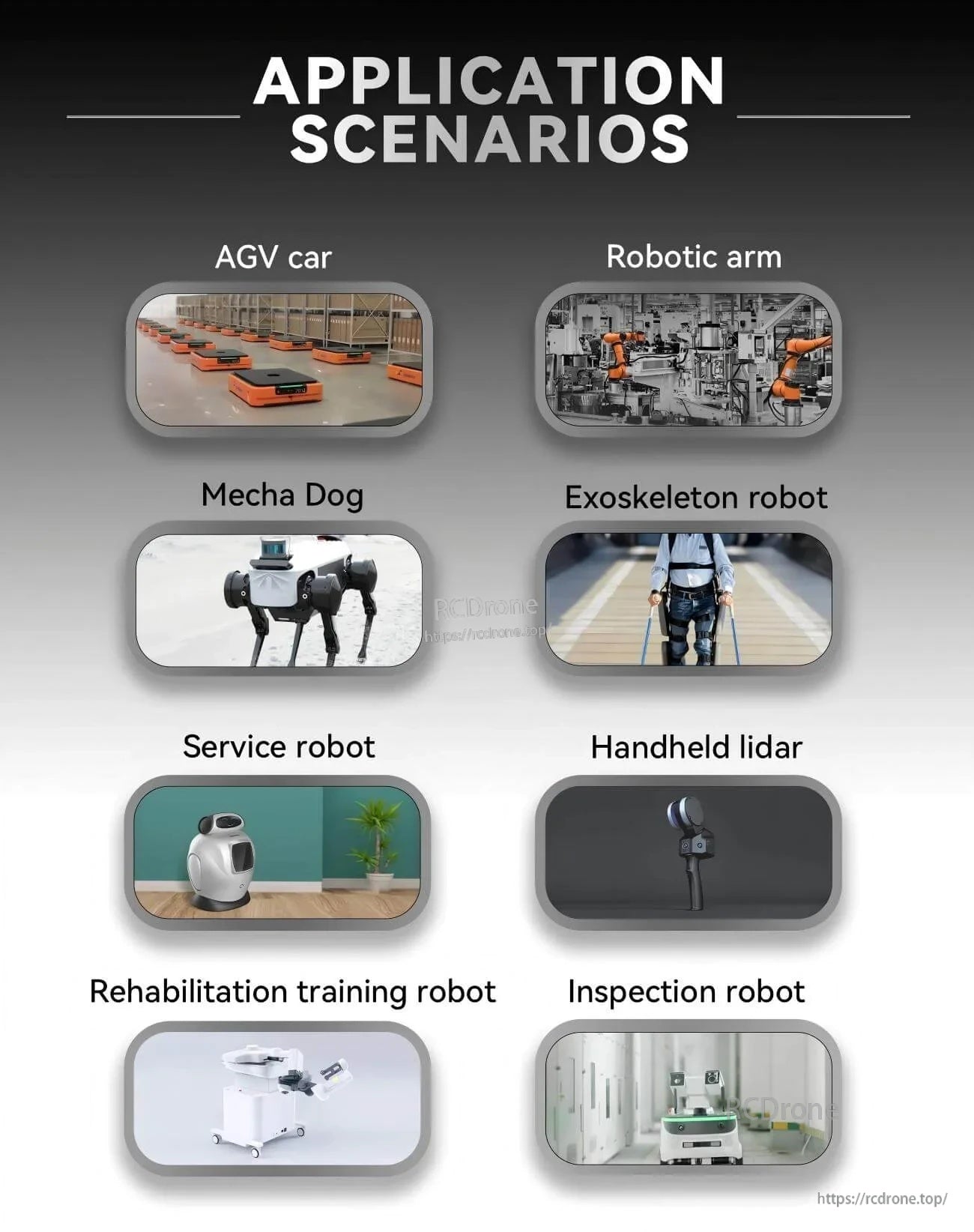
Разработан для задач активации роботов от AGV и манипуляторов до четырехногих роботов и экзоскелетных систем.
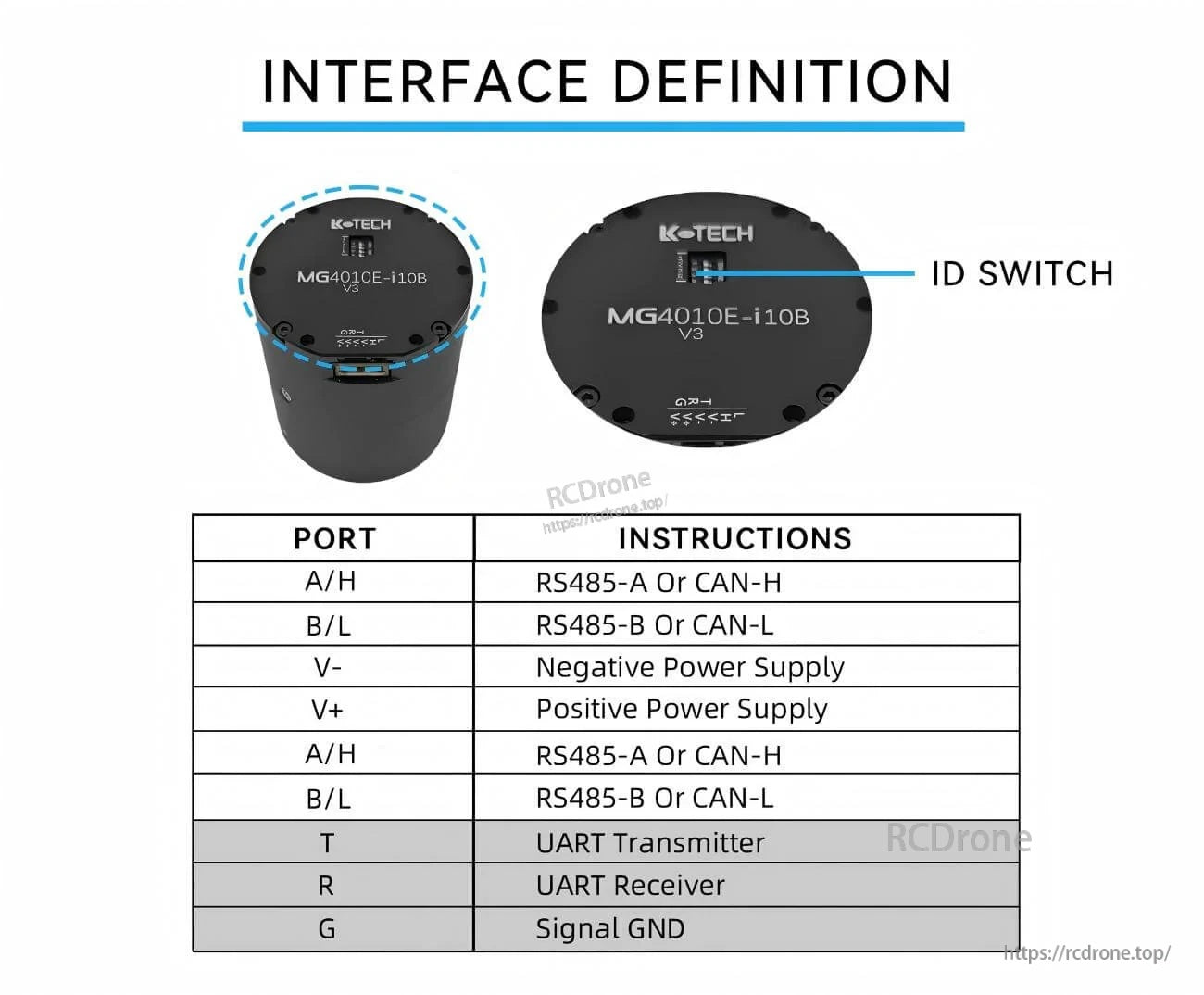
Определения портов охватывают питание, проводку RS485/CAN и контакты UART, с встроенным переключателем ID для адресации.