




Двигатель LKMTECH MG5010E-i10-V3 24В 160Вт, планетарный редуктор 1:10, RS485/CAN, энкодер 18 бит
Двигатель LKMTECH MG5010E-i10-V3 24В 160Вт, планетарный редуктор 1:10, RS485/CAN, энкодер 18 бит
LKMTECH
Не удалось загрузить сведения о доступности самовывоза
Обзор
Мотор LKMTECH MG5010E-i10-V3 является бесщеточным мотором с планетарным редуктором и встроенным энкодером для робототехники и приложений управления движением. Он предназначен для работы при 24 В и поддерживает связь RS485 или CAN при использовании с рекомендованным приводом.
Ключевые особенности
- Высокопроизводительный бесщеточный мотор + высокоточный планетарный редуктор
- Номинальный крутящий момент 4 N.m; максимальный крутящий момент 7 N.m
- Передаточное отношение 1:10 (Тип редуктора: PG5110)
- 18-битный магнитный энкодер (со стороны мотора)
- Варианты связи: RS485 или CAN (с рекомендованным приводом DG40E)
- Температура мотора: ДА
- Интерфейс двойного датчика температуры для мониторинга температуры мотора и привода в реальном времени
- Основные характеристики привода: входное напряжение 7.4-32V; RS485 или CAN шина связи; двойные энкодеры с памятью нулевой точки после отключения питания
Технические характеристики
| Название товара | MG5010E-i10-V3 |
| Номинальное напряжение | 24V |
| Максимальная скорость | 320 об/мин |
| Номинальная скорость | 235 об/мин |
| Номинальный крутящий момент | 4 N.m |
| Максимальный крутящий момент | 7 N.m |
| Номинальный ток | 4.4A |
| Максимальная мощность | 160W |
| Константа скорости | 97.9 об/мин/В |
| Константа крутящего момента | 0.1 N.m/A |
| Обороты | 13 |
| Тип обмотки | Y |
| Сопротивление фазы | 0.466Ω |
| Индуктивность фазы | 0.26mH |
| Полюса мотора | 28 |
| Инерция ротора | 850 гсм² |
| Температура мотора | ДА |
| Тип редуктора | PG5110 |
| Коэффициент редукции | 1:10 |
| Зазор | 6 угл.мин (также указано как ≤8 угл.мин) |
| Номинальная нагрузка подшипника | 1000N |
| Вес мотора | 420g |
| Размер | Φ63*41.5 |
| Рекомендуемый привод | DG40E |
| Входное напряжение привода | 7.4-32V |
| Связь | RS485 ИЛИ CAN |
| Частота связи | RS485: 500Гц (115200bps) / CAN: 2КГц (1Mbps) |
| Энкодер | 18-битный магнитный энкодер |
| Скорость передачи данных энкодера (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Скорость передачи данных (CAN) | 1M |
| Режим управления | Контур крутящего момента (32КГц) / Контур скорости (8КГц) / Контур положения (4КГц) |
| Кривая ускорения | Трапециевидное ускорение |
Определение интерфейса
| Интерфейс | Примечание |
|---|---|
| A/H | RS485-A или CAN-H |
| B/L | RS485-B или CAN-L |
| V- | Отрицательное питание |
| V+ | Положительное питание |
| A/H | RS485-A или CAN-H |
| B/L | RS485-B или CAN-L |
| T | UART передатчик |
| R | UART приемник |
| G | Сигнальный GND |
Применения
- Человекообразные роботы
- Роботизированные руки
- Экзоскелеты / носимые роботы
- Четвероногие роботы / платформы для роботов-собак
- AGV-автомобили / AGV-транспорт
- ARU-роботы
Для получения рекомендаций по выбору и поддержки интеграции, свяжитесь с https://rcdrone.top/ или напишите на электронную почту [email protected] .
Руководства
Детали

MG5010E-i10-V3 интегрирует бесщеточный мотор и планетарный редуктор в компактный привод для робототехники и управления движением.

Планетарный редуктор с передаточным отношением 1:10 помогает обеспечить более высокий крутящий момент и стабильность позиционирования для сборок с суставами и колесным приводом.


18-битный магнитный энкодер на стороне мотора поддерживает точную обратную связь; некоторые конфигурации также используют вспомогательный энкодер на стороне редуктора.
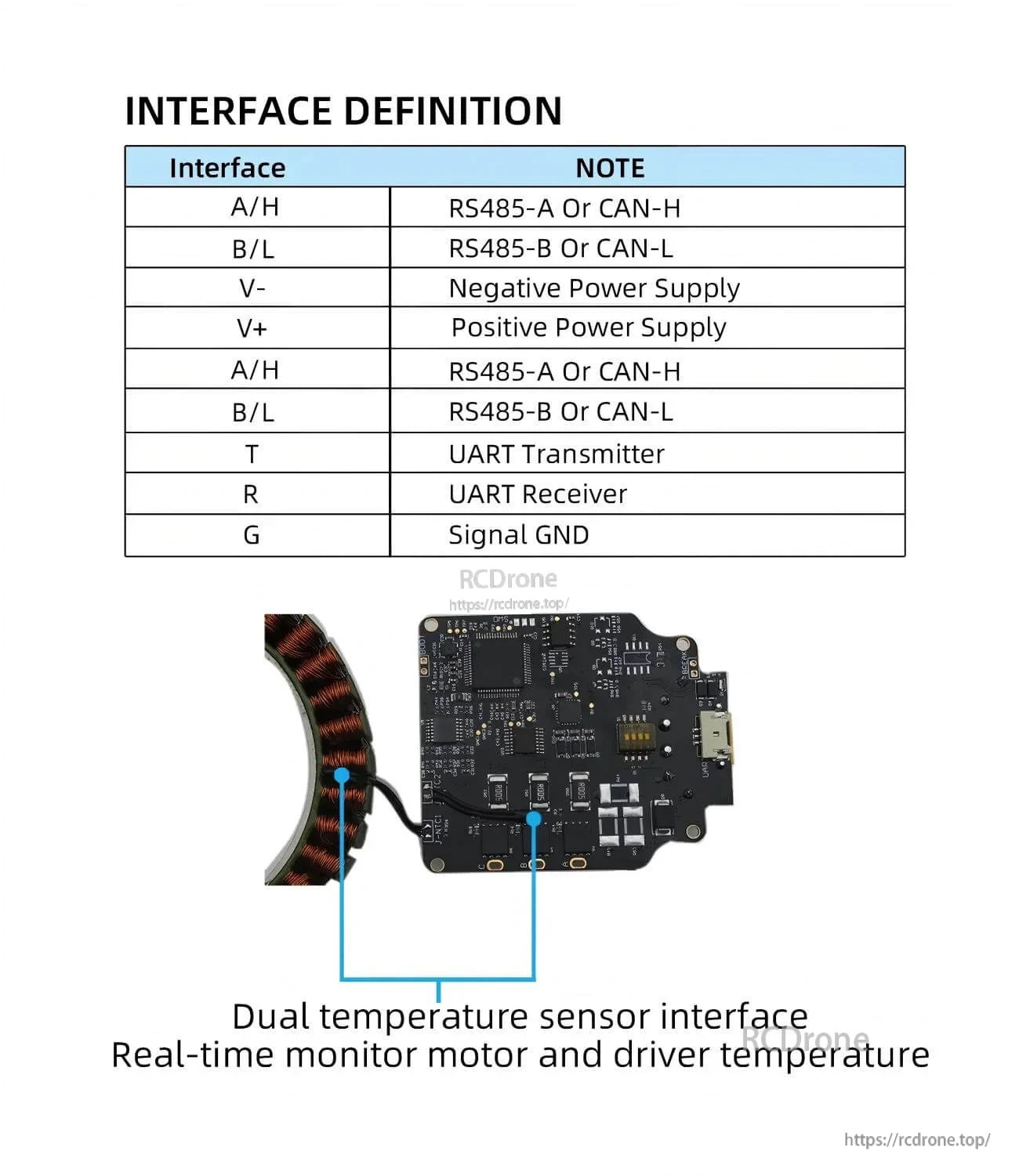
Четкие определения выводов и двойные входы для датчиков температуры упрощают проводку и позволяют осуществлять мониторинг температуры мотора/драйвера в реальном времени.
Подходит для платформ, таких как AGV, роботизированные руки, четвероногие роботы и носимые роботы, где требуется компактный крутящий момент.
Related Collections




