




Двигатель LKMTECH MG6012-i36-V3 24В/48В 25Н·м 1:36 планетарный редуктор, RS485/CAN, энкодер 18 бит
Двигатель LKMTECH MG6012-i36-V3 24В/48В 25Н·м 1:36 планетарный редуктор, RS485/CAN, энкодер 18 бит
LKMTECH
Не удалось загрузить сведения о доступности самовывоза
Обзор
LKMTECH MG6012-i36-V3 Двигатель - это высокомощный бесщеточный моторный модуль с планетарным редуктором и поддержкой связи с энкодером/приводом для систем движения в робототехнике. Текст позиционирования продукта включает: “Высший стандарт проектирования продукта”, “Высокая выходная мощность”, “Большой выходной крутящий момент” и “Высокая точность”.
Сценарии применения
- Человекообразные роботы
- Роботизированные руки
- Экзоскелеты
- Четвероногие роботы
- AGV-автомобили / AGV-транспорт
- Роботы ARU
- Робот-собака
- Носимый робот
Ключевые особенности
- Мощный бесщеточный мотор
- Высокоточный планетарный редуктор
- Высокопроизводительный драйвер FOC (текстовая ссылка)
- Входное напряжение: 12-60V
- Связь: CAN или RS485
- Главное управление: 170M основная частота с 32-битным ARM (текстовая ссылка)
- Энкодер: 18-битный абсолютный энкодер с одним кольцом / 18-битный магнитный энкодер (оба указаны)
- «Одна калибровка, нулевая позиция никогда не теряется, не нужно искать нулевую точку при отключении питания.” (указано)
- Переключатель ID (указано)
- Интерфейс двойного датчика температуры; мониторинг температуры мотора и драйвера в реальном времени (указано)
Технические характеристики
| Параметр | Версия 24V | Версия 48V |
|---|---|---|
| Название товара | MG6012-i36-V3 | MG6012-i36-V3 |
| Номинальное напряжение | 24V | 48V |
| Максимальная скорость | 45 об/мин | 88 об/мин |
| Номинальный крутящий момент | 25 Н·м | 25 Н·м |
| Номинальная скорость | 45 об/мин | 74 об/мин |
| Номинальный ток | 4A | 4.8A |
| Максимальная мощность | 140W | 500W |
| Максимальный крутящий момент | 40 Н·м | 40 Н.m |
| Постоянная скорости | 67об/мин/В | 67об/мин/В |
| Постоянная момента | 0.175Н·м/А | 0.146Н·м/А |
| Обороты | 15 | 15 |
| Тип обмотки | Y | Y |
| Сопротивление фазы | 0.63Ω | 0.63Ω |
| Индуктивность фазы | 0.28мГн | 0.28мГ |
| Полюса мотора | 28 | 28 |
| Инерция ротора | 930 | 908 |
| Температура мотора | ДА | ДА |
| Тип редуктора | PG4136 | PG4136 |
| Передаточное отношение | 1:36 | 1:36 |
| Зазор | ≤12 угл.мин | ≤12 угл.мин |
| Номинальная нагрузка подшипника | 1770N | 1770N |
| Вес мотора | 503г | 503г |
| Рекомендуемый привод | DG60 | DG60 |
| Входное напряжение привода | 12-60V | 12-60V |
| Связь | RS485 ИЛИ CAN | RS485 ИЛИ CAN | Частота связи | RS485:500Гц(115200бит/с)/CAN:2КГц(1Мбит/с) | RS485:500Гц(115200бит/с)/CAN:2КГц(1Мбит/с) |
| Энкодер | 18-битный магнитный энкодер | 18-битный магнитный энкодер |
| Скорость передачи энкодера (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1М, 2Мбит/с | 9600, 19200, 57600, 115200, 230400, 406800, 1М, 2Мбит/с |
| Скорость передачи (CAN) | 100К, 125К, 250К, 500К, 1М | 100К, 125К, 250К, 500К, 1М |
| Режим управления | Контур крутящего момента(32КГц)/Контур скорости(8КГц)/Контур положения(4КГц) | Контур крутящего момента(32КГц)/Контур скорости(8КГц)/Контур положения(4КГц) |
| Кривая ускорения | Трапециевидное ускорение | Трапециевидное ускорение |
Определение интерфейса
CAN/RS485 и переключатель ID предоставлены (указано). Интерфейсные заметки:
| Интерфейс | Заметка |
|---|---|
| A/H | RS485-A или CAN-H |
| B/L | RS485-B или CAN-L |
| V- | Отрицательное питание |
| V+ | Положительное питание |
| T | UART передатчик |
| R | UART приемник |
| G | Сигнальный GND |
Руководства / Документы
По вопросам интеграции (настройка CAN/RS485, выбор скорости передачи, или сопряжение контроллера) свяжитесь с [email protected] or посетите https://rcdrone.top/.
Детали

MG6012-i36-V3 интегрирует бесщеточный двигатель, планетарный редуктор и коммуникацию с энкодером для роботизированных суставов.
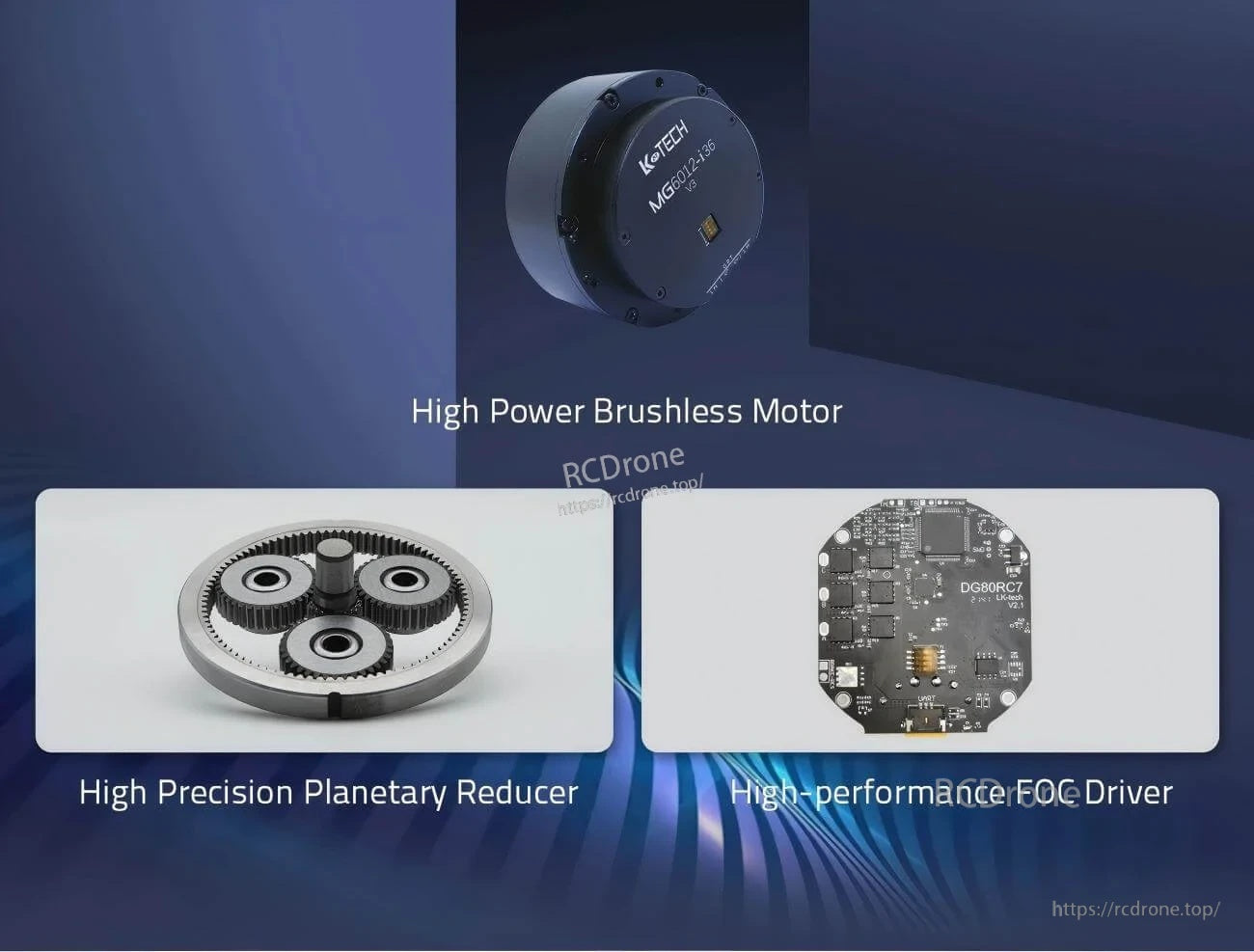
Компактная система привода, построенная вокруг высокомощного сердечника двигателя, прецизионного планетарного редуктора и драйвера FOC.
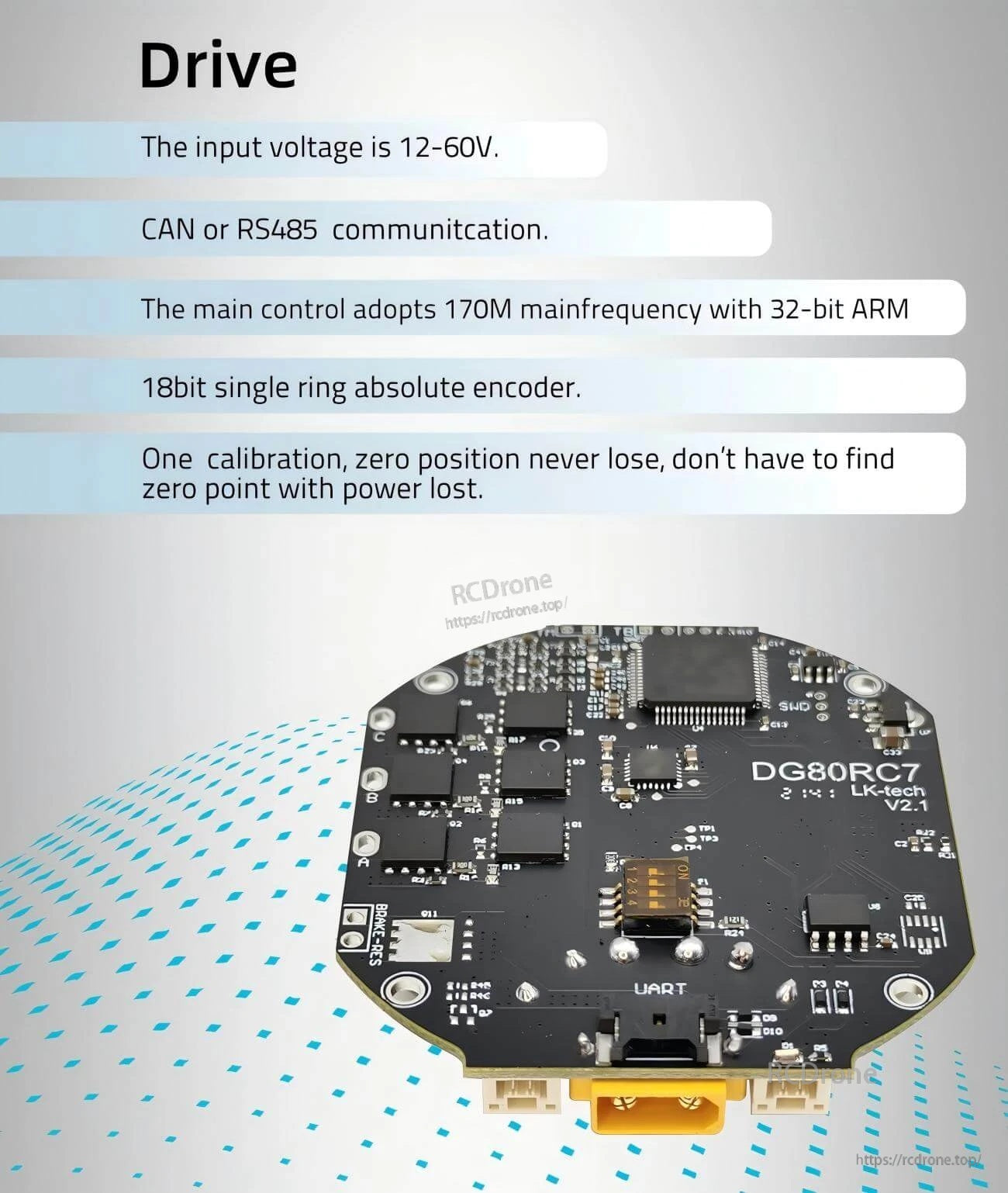
Электроника контроллера поддерживает вход 12–60V с CAN или RS485 коммуникацией, а также опцию 18-битного абсолютного энкодера.
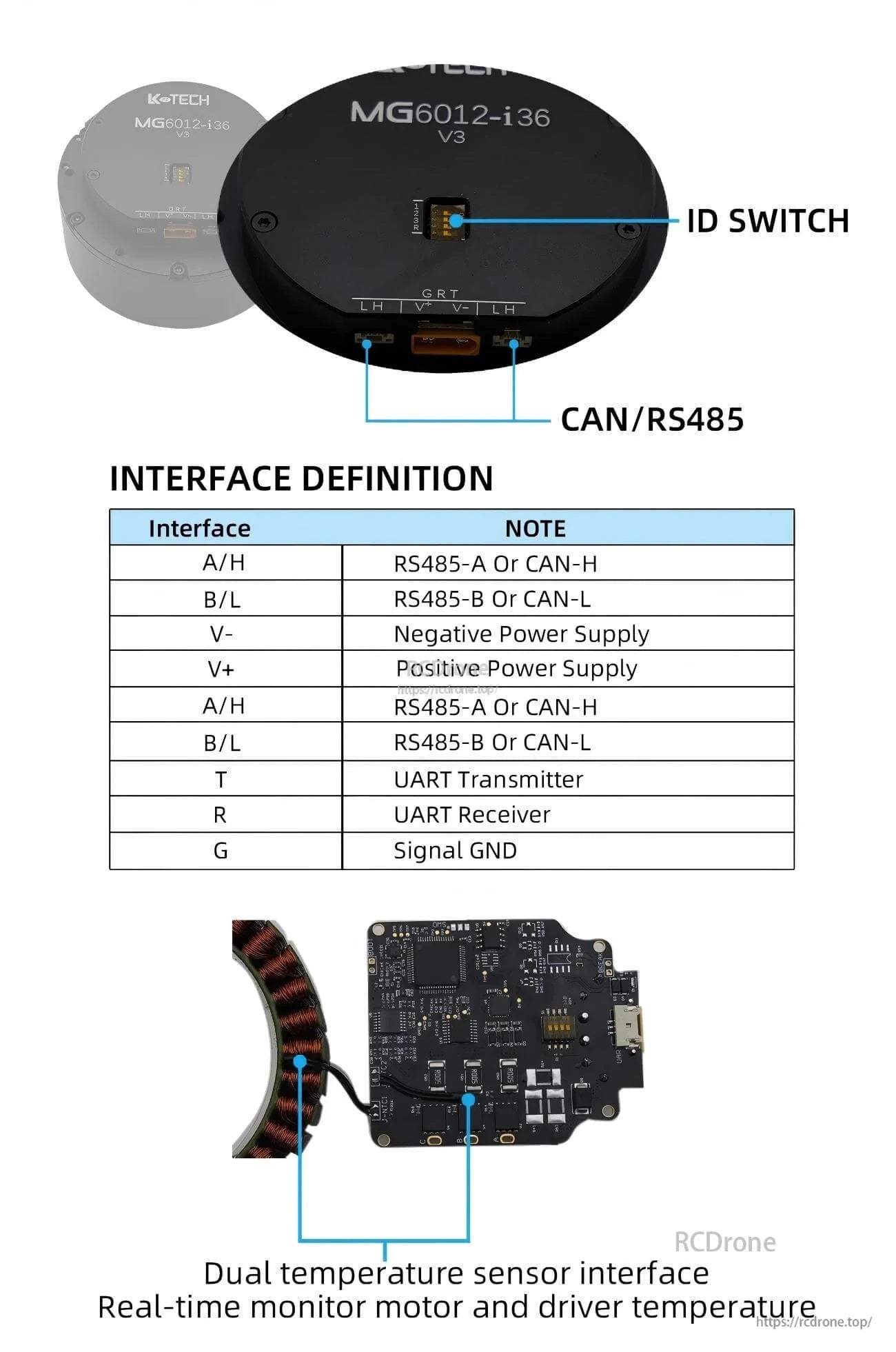
Четкие определения выводов и встроенный переключатель ID помогают упростить проводку и настройки многоузловых систем CAN/RS485.

Планетарный редуктор 1:36 разработан для низкого зазора и высокого крутящего момента в прецизионных механизмах движения.
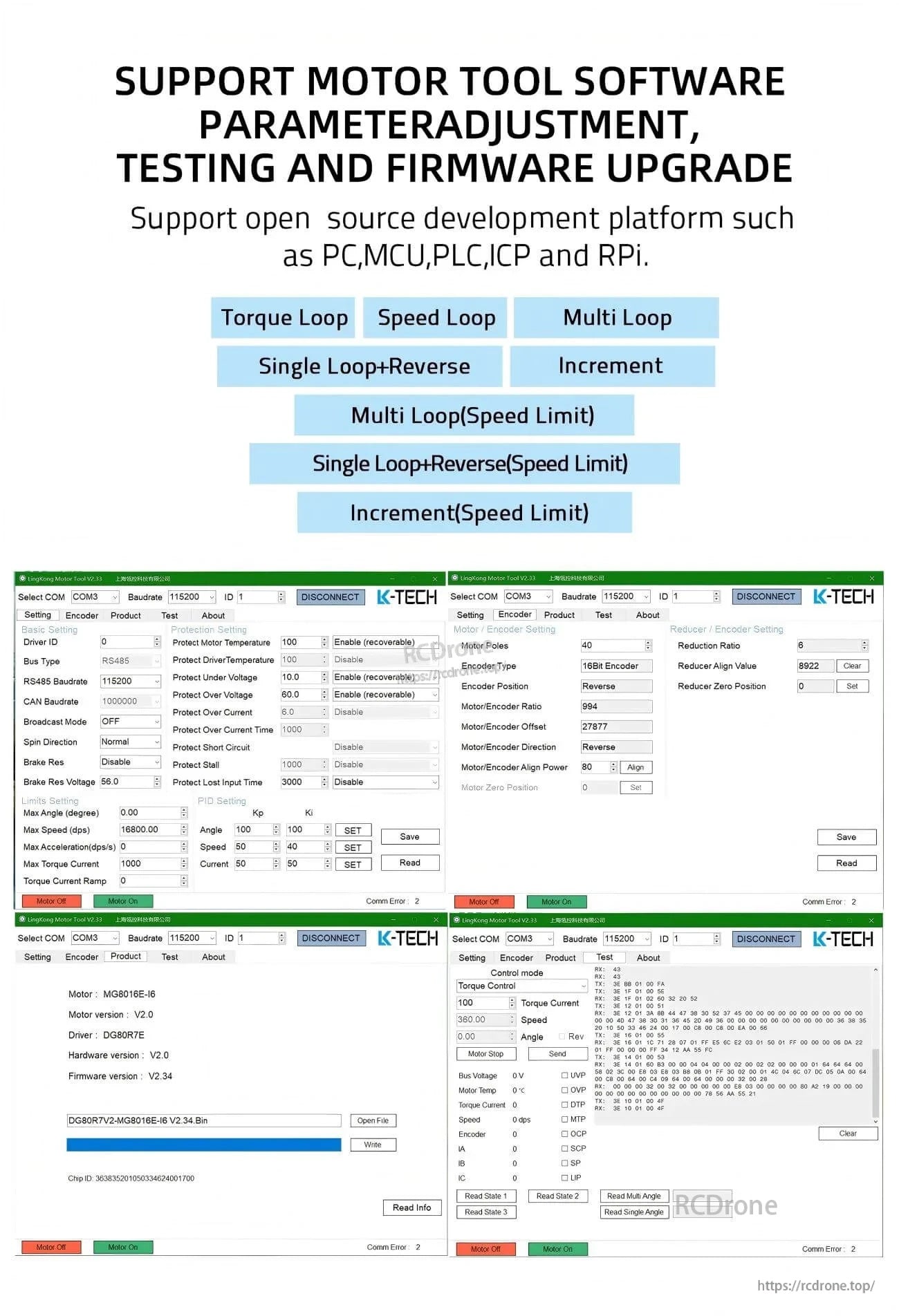
Программное обеспечение для конфигурации поддерживает настройку параметров, тестирование режимов замыкания и обновления прошивки на общих платформах разработки.
Подходит для роботизированных приложений, таких как AGV, роботизированные руки, четвероногие роботы и носимые/экзоскелетные механизмы.
Related Collections




