




Двигатель LKMTECH MG6012E-i8B-V3 48В Планетарный редуктор 1:8 Тормоз RS485/CAN Магнитный энкодер
Двигатель LKMTECH MG6012E-i8B-V3 48В Планетарный редуктор 1:8 Тормоз RS485/CAN Магнитный энкодер
LKMTECH
Не удалось загрузить сведения о доступности самовывоза
Обзор
Двигатель LKMTECH MG6012E-i8B-V3 представляет собой двухступенчатый планетарный редуктор с тормозами, разработанный для робототехники и автоматизации актуаторов, требующих компактного размера, высокого крутящего момента и цифровой связи.
Ключевые особенности
- Двухступенчатый планетарный редуктор с тормозом
- Передаточное отношение: 1:8
- Зазор в редукторе: arcmin (текст на изображении); 6 arcmin (спецификация)
- Размер мотора: 80*60
- 18-битный однооборотный абсолютный магнитный энкодер (текст на изображении)
- Конфигурация энкодера: 18bit (мотор) + 14bit (редуктор) магнитный энкодер
- Связь: RS485 или CAN
- Рекомендуемый привод: DG60Ev2; входное напряжение привода: 12-60V
- Два энкодера, запоминающие нулевую точку после отключения питания (текст на изображении)
- Поддержка открытых платформ для разработки, таких как ПК, MCU, PLC, ICP и RPi (текст на изображении)
- Режим управления (спецификация): Цикл крутящего момента (32KHz) / Цикл скорости (8KHz) / Цикл положения (4KHz)
- Кривая ускорения: Трапециевидное ускорение
Для получения рекомендаций по выбору или поддержки интеграции, свяжитесь с [email protected] or посетите https://rcdrone.top/.
Спецификации
| Название товара | MG6012E-i8B-V3 |
| Номинальное напряжение | 48В |
| Максимальная скорость | 310об/мин |
| Номинальная скорость | 256об/мин |
| Номинальный крутящий момент | 6Н·м |
| Максимальный крутящий момент | 16Н·м |
| Номинальный ток | 3.5А |
| Максимальная мощность | 294Вт |
| Константа скорости | 42.7об/мин/В |
| Константа крутящего момента | 1.09Н·м/А |
| Обороты | 20 |
| Тип обмотки | Y |
| Сопротивление фазы | 1.3 |
| Индуктивность фазы | 0.55mH |
| Полюса мотора | 28 |
| Инерция ротора | 930gcm2 |
| Температура мотора | ДА |
| Тип редуктора | PG4108 |
| Передаточное отношение | 1:8 |
| Зазор | 6 угл.мин |
| Номинальная нагрузка подшипника | 1800N |
| Вес мотора | 718g |
| Тип тормоза | MT15 |
| Момент торможения | 1.5N.m |
| Напряжение запуска | 24V |
| Мощность запуска | 17.5W |
| Устойчивое напряжение | 7V |
| Устойчивая мощность | 1.5W |
| Рекомендуемое управление | DG60Ev2 |
| Входное напряжение управления | 12-60V |
| Связь | RS485 ИЛИ CAN |
| Частота связи | RS485:500Hz(115200bps)/CAN:2KHz(1Mbps) |
| Энкодер | 18 бит(двигатель)+14 бит(редуктор) Магнитный энкодер |
| Скорость передачи данных энкодера (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1M, 2Mbps |
| Скорость передачи данных (CAN) | 100K, 125K, 250K, 500K, 1M |
| Режим управления | Контур момента (32KHz)/Контур скорости (8KHz)/Контур положения (4KHz) |
| Кривая ускорения | Трапециевидное ускорение |
Определение интерфейса (Текст изображения)
- ID переключатель
- Отрицательное питание
- Положительное питание
- CAN / RS485 (LH) (AB)
| Порт | Инструкции |
|---|---|
| A/H | RS485-A или CAN-H |
| B/L | RS485-B или CAN-L |
| V- | Отрицательное питание |
| V+ | Положительное питание |
| A/H | RS485-A или CAN-H |
| B/L | RS485-B или CAN-L |
| T | UART передатчик |
| R | UART приемник |
| G | Сигнальный GND |
Применения
- Человекообразные роботы
- Роботизированные руки
- Экзоскелеты
- Четвероногие роботы
- AGV транспортные средства / AGV автомобиль
- ARU роботы
- Меха-собака
- Сервисный робот
- Портативный лидар
- Робот для реабилитационного обучения
- Инспекционный робот
Руководства
Детали

Компактный двухступенчатый планетарный редуктор с тормозом для роботизированных приводов, где важны высокий крутящий момент и небольшой размер.
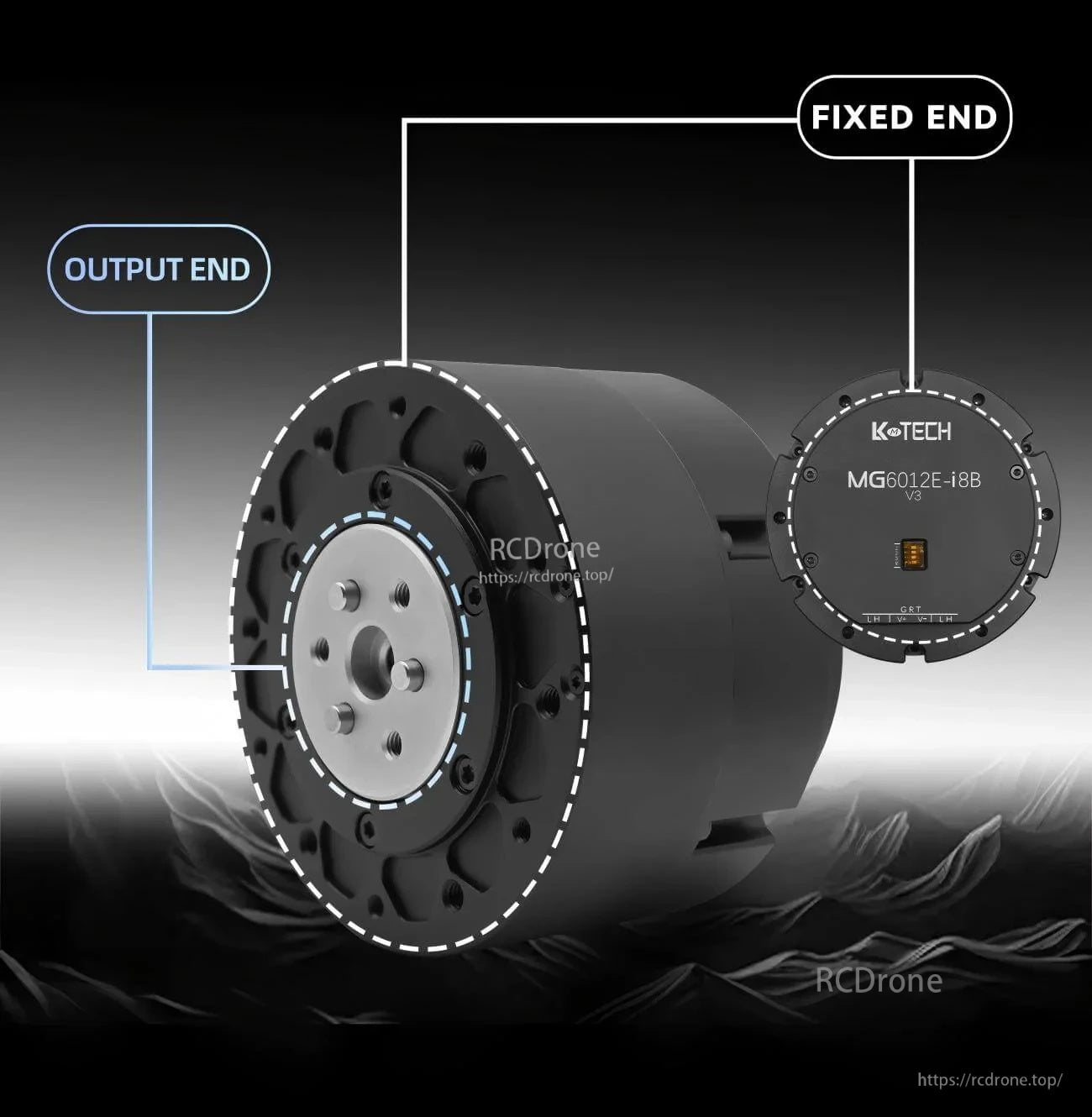
Как выходной, так и фиксированный конец разработаны для простого монтажа в соединениях, руках и других сборках актуаторов.

18-битный одноповоротный абсолютный магнитный энкодер и интегрированная тормозная система поддерживают точное управление и стабильное удержание под нагрузкой.
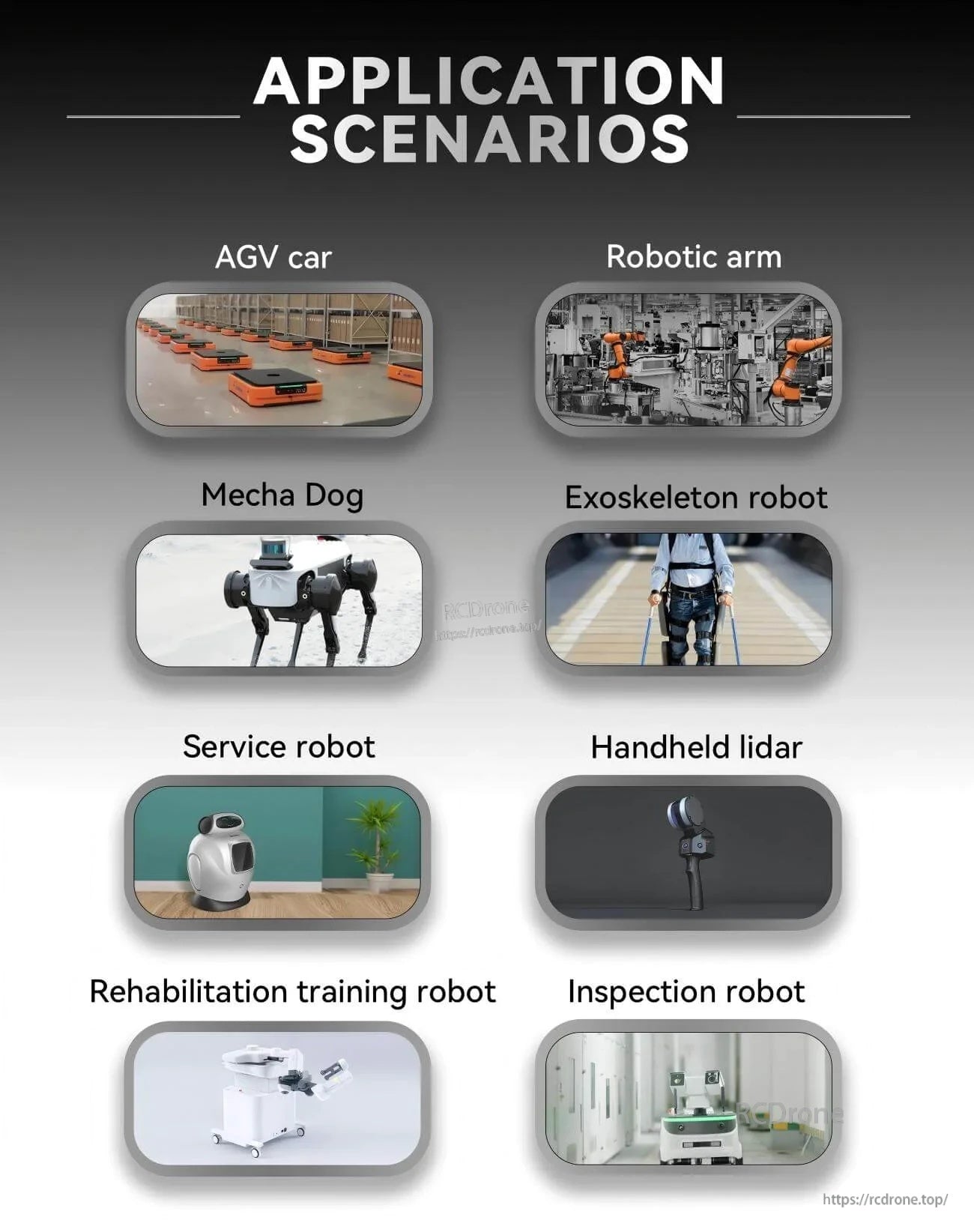
Подходит для автоматизационных проектов, таких как модули привода AGV, роботизированные руки, четвероногие роботы, экзоскелеты и инспекционные роботы.
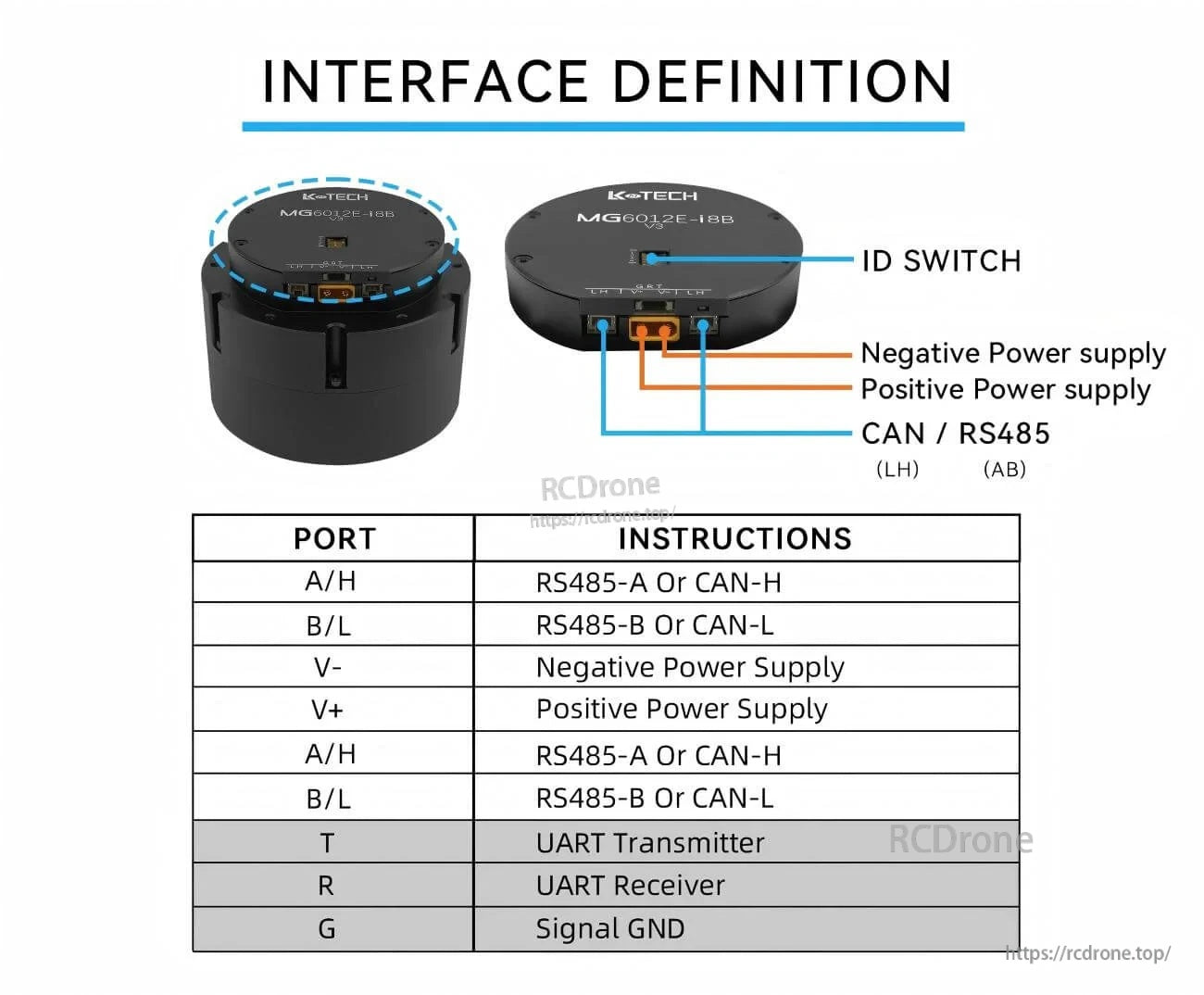
Четкая маркировка портов помогает ускорить подключение для питания, конфигурации ID и связи RS485/CAN.
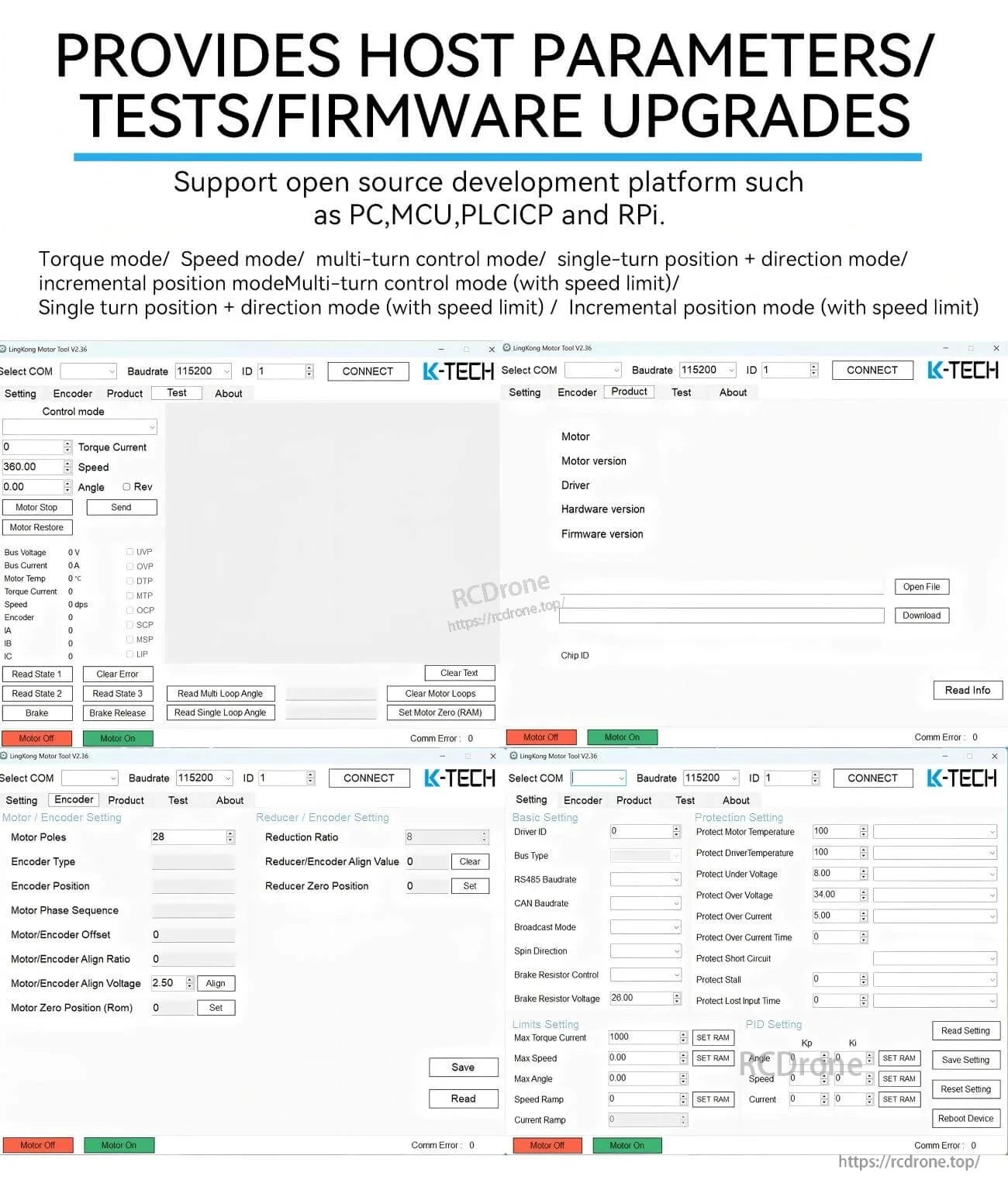
Инструменты хоста обеспечивают конфигурацию параметров, тестирование и обновления прошивки на общих платформах разработки.
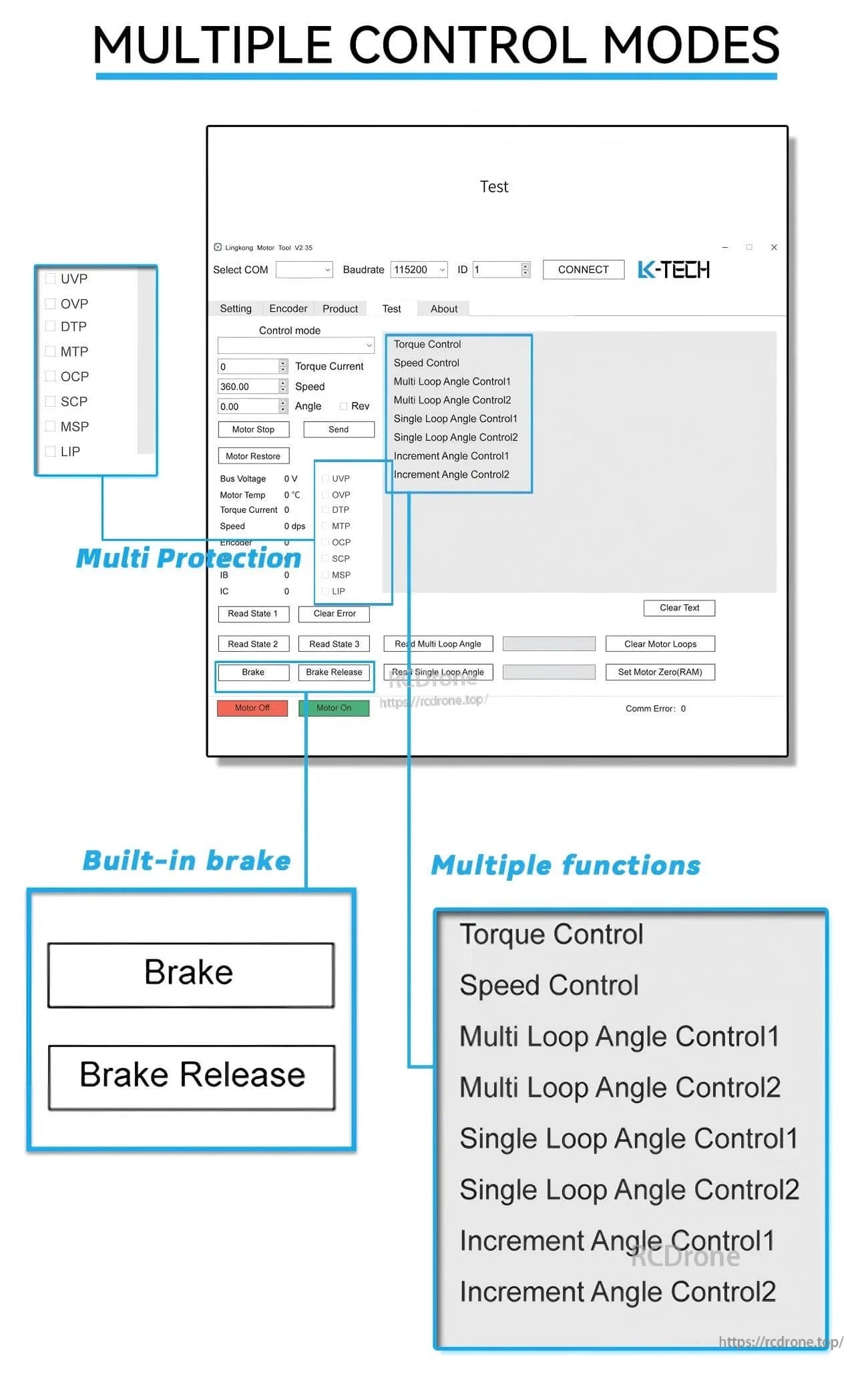
Режимы управления моментом, скоростью и положением могут быть выбраны в соответствии с различными актуатор и требованиями к управлению движением.





