




Двигатель LKMTECH MHF6015-V3 24В 872об/мин 3Н·м 19-битный магнитный энкодер RS485/CAN для робототехники
Двигатель LKMTECH MHF6015-V3 24В 872об/мин 3Н·м 19-битный магнитный энкодер RS485/CAN для робототехники
LKMTECH
Не удалось загрузить сведения о доступности самовывоза
Обзор
Двигатель LKMTECH MHF6015-V3 - это бесщеточный двигатель на 24 В с 19-битным магнитным энкодером и RS485 или CAN связью, предназначенный для роботизированных движений, таких как гуманоидные роботы, роботизированные руки, экзоскелеты и AGV-автомобили.
Ключевые особенности
- Интегрированный дизайн: встроенная плата управления, высокопроизводительный MCU, настройка параметров хоста, малый объем и большой крутящий момент, высокоточный абсолютный энкодер.
- Пустотелый дизайн; размер пустоты обозначен как 12,7 мм (12,6 мм показано внутри пустотелого вызова).
- Работает плавно; сертификация CE (как указано).
- Заявление о сердечниках материалов: “Сердечник двигателя изготовлен из высококачественной электротехнической стали и высокотемпературного сильного магнитного постоянного магнита.”
- Заявление о внешнем роторе: “Многоступенчатый плоский дизайн внешнего ротора обеспечивает более высокий крутящий момент и подходит для космических приложений.
- Заявление о подшипниках: “Бесщеточная структура с высокопроизводительными подшипниками для более плавного вращения и длительного срока службы.”
- Заявление о текущем контроле/сэмплировании: “Высокая точность, низкотемпературное обесцвеченное сплавное сопротивление, точный контроль тока.”
- Заявление о приводе: “Полный N-трубочный трехфазный полный мостовой привод, низкое внутреннее сопротивление, высокий ток.”
- Заявление о контроле: “Замкнутый контур по моменту, скорость, режим управления положением могут переключаться произвольно.”
- Заявление о параметрах/тестах/обновлениях прошивки хоста; поддерживает платформы для разработки с открытым исходным кодом, такие как ПК, MCU, PLC, ICP и RPi.
- Заявление о режимах: Режим момента / Режим скорости / режим многократного поворота / режим одноповоротного положения + направления / режим инкрементального положения; режим многократного поворота (с ограничением скорости) / режим одноповоротного положения + направления (с ограничением скорости) / режим инкрементального положения (с ограничением скорости).
Спецификации
| Название товара | MHF6015-V3 |
| Обороты | 25 |
| Номинальное напряжение | 24В |
| Максимальная скорость | 872об/мин |
| Номинальный крутящий момент | 0.82Н·м |
| Номинальная скорость | 560об/мин |
| Номинальный ток | 3.1A |
| Максимальная мощность | 57Вт |
| Максимальный крутящий момент | 3Н·м |
| Константа скорости | 23.3об/мин/В |
| Константа крутящего момента | 0.26Н·м/А |
| Тип обмотки | Y |
| Сопротивление фазы | 2.17Ω |
| Индуктивность фазы | 1.44mH |
| Полюса мотора | 28 |
| Инерция ротора | 515gcm² |
| Температура мотора | ДА |
| Номинальная нагрузка подшипника | 280N |
| Вес мотора | 251g |
| Рекомендуемый привод | DHF50 |
| Входное напряжение привода | 7.4-32V |
| Связь | RS485 ИЛИ CAN |
| Частота связи | RS485:500Гц(115200бит/с)/CAN:2КГц(1Мбит/с) |
| Энкодер | 19-битный магнитный энкодер |
| Скорость передачи данных энкодера (RS485) | 9600, 19200, 57600, 115200, 230400, 406800, 1М, 2Мбит/с |
| Скорость передачи данных (CAN) | 100К, 125К, 250К, 500К, 1М |
| Режим управления | Контур крутящего момента (24КГц)/Контур скорости (8КГц)/Контур положения (8КГц) |
| Кривая ускорения | Трапециевидное ускорение |
Для получения рекомендаций по выбору или поддержки интеграции, свяжитесь с командой обслуживания клиентов по телефону https://rcdrone.top/ или по электронной почте [email protected].
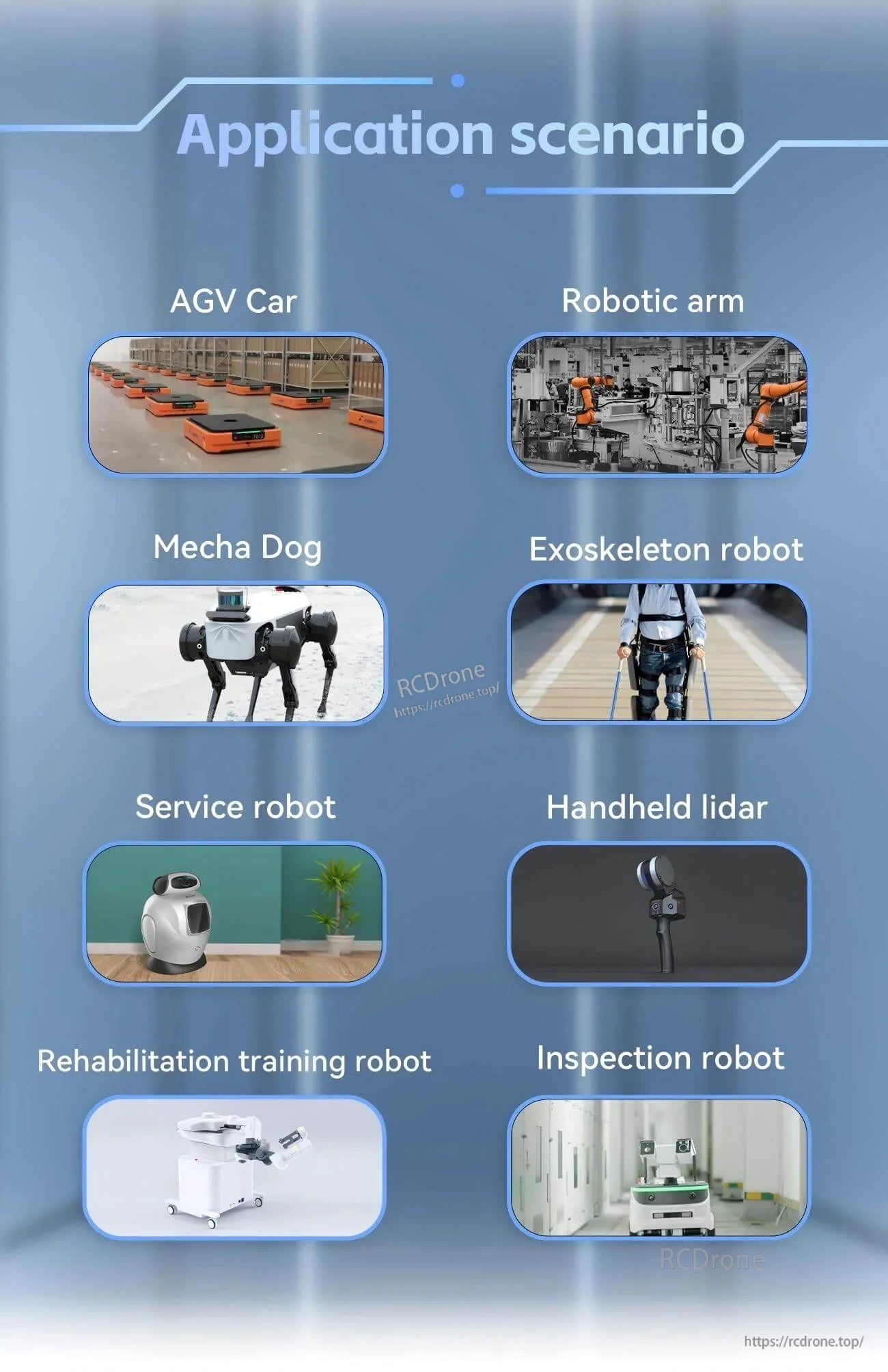
Применения
- Человекообразные роботы
- Роботизированные руки
- Экзоскелеты / экзоскелетный робот
- Четвероногие роботы / меха-собака
- AGV-автомобили / AGV-машина
- Роботы ARU
- Сервисный робот
- Портативный лидар
- Робот для реабилитационного обучения
- Инспекционный робот
Руководства / Документы
Детали

Компактный интегрированный серво-стиль мотора упрощает проводку и сборку для роботизированных суставов.
Интегрированная плата привода и МКУ поддерживают настройку параметров от хоста для более легкой наладки.
 Конструкция с полым валом (с диаметром 12,7 мм) помогает прокладывать кабели или валы через мотор для более аккуратной сборки.
Конструкция с полым валом (с диаметром 12,7 мм) помогает прокладывать кабели или валы через мотор для более аккуратной сборки.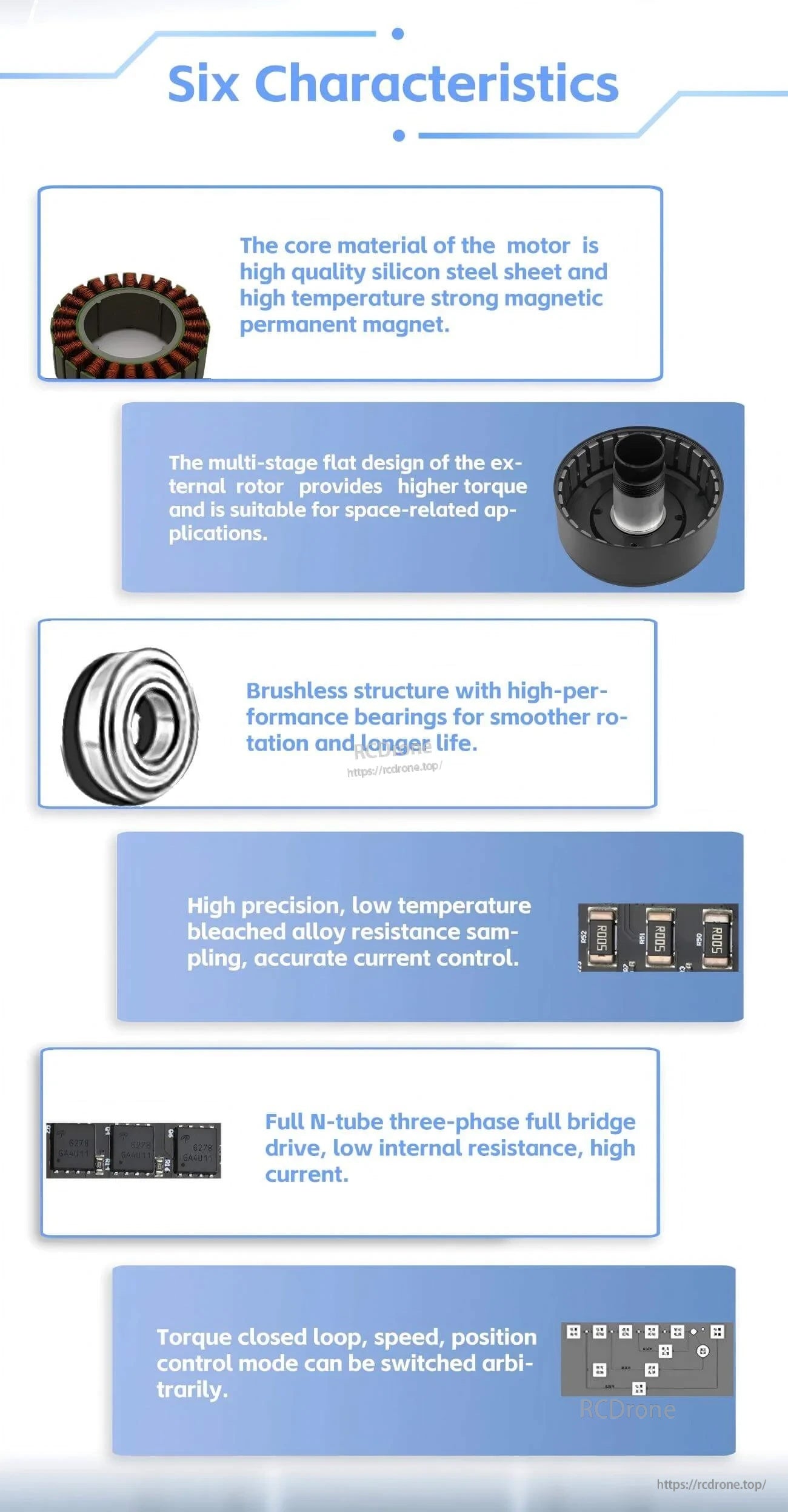
Ключевые заметки по дизайну охватывают материалы, структуру крутящего момента внешнего ротора, подшипники и возможности замкнутого управления.
Разработано для задач движения в робототехнике, таких как AGV, роботизированные руки, четвероногие роботы, экзоскелеты и сервисные роботы.
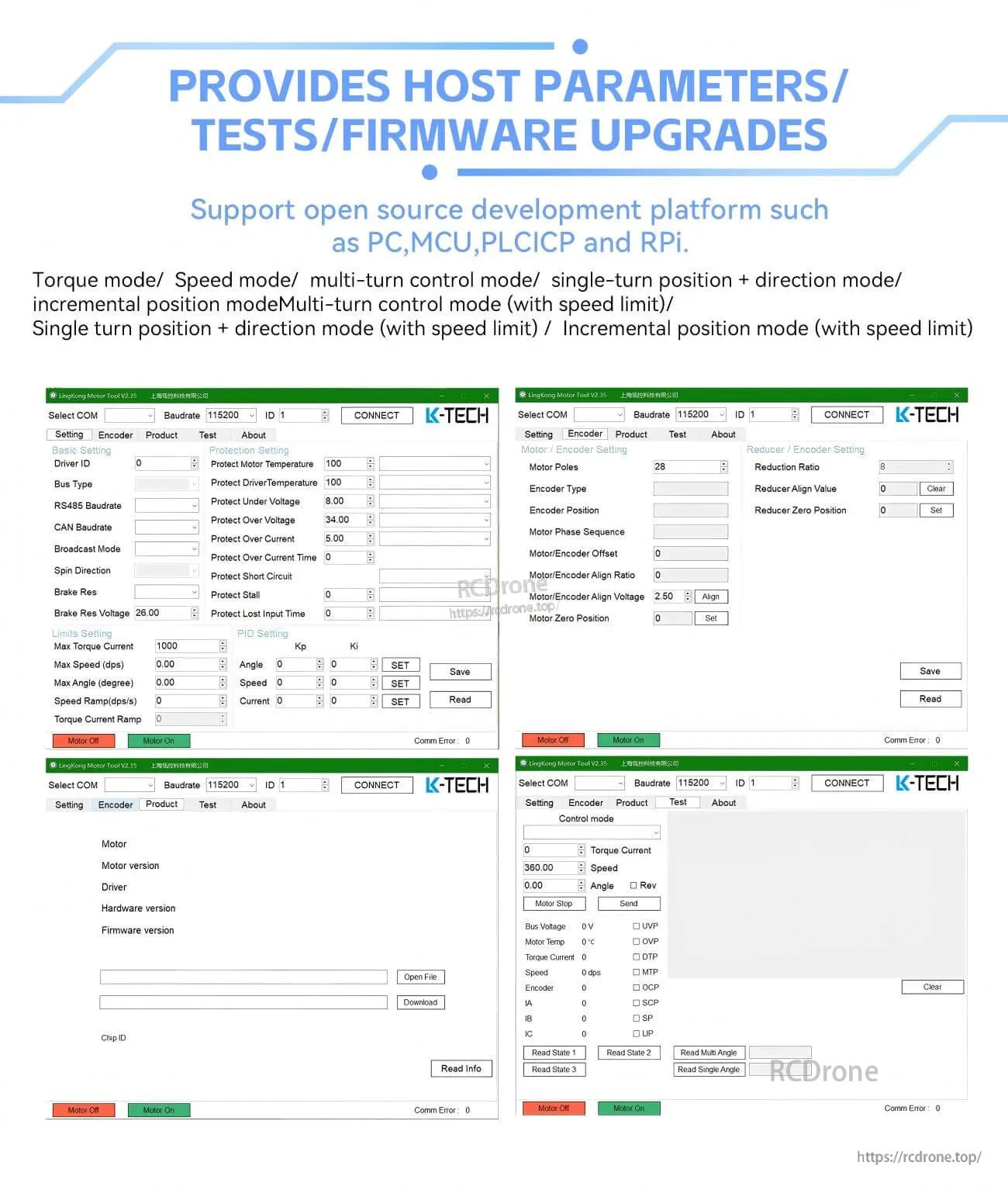
Страницы программного обеспечения для ПК иллюстрируют настройку параметров, функции тестирования и поддержку обновления прошивки.

Related Collections




