




Двигатель MagicLab P110, пиковый крутящий момент 360 Н·м, двойной энкодер, CAN/EtherCAT привод для гуманоидных роботов
Двигатель MagicLab P110, пиковый крутящий момент 360 Н·м, двойной энкодер, CAN/EtherCAT привод для гуманоидных роботов
MagicLab
Не удалось загрузить сведения о доступности самовывоза
Обзор
MagicLab P110 Motor - это мотор с высоким крутящим моментом, предназначенный для роботизированных суставов, оснащенный системой с двойным энкодером и высокоскоростными вариантами связи (CAN / EtherCAT). Он предназначен для суставов с высокой нагрузкой, таких как актуаторы ног в полноразмерных гуманоидных роботах и промышленных крупных четвероногих роботах.
Ключевые особенности
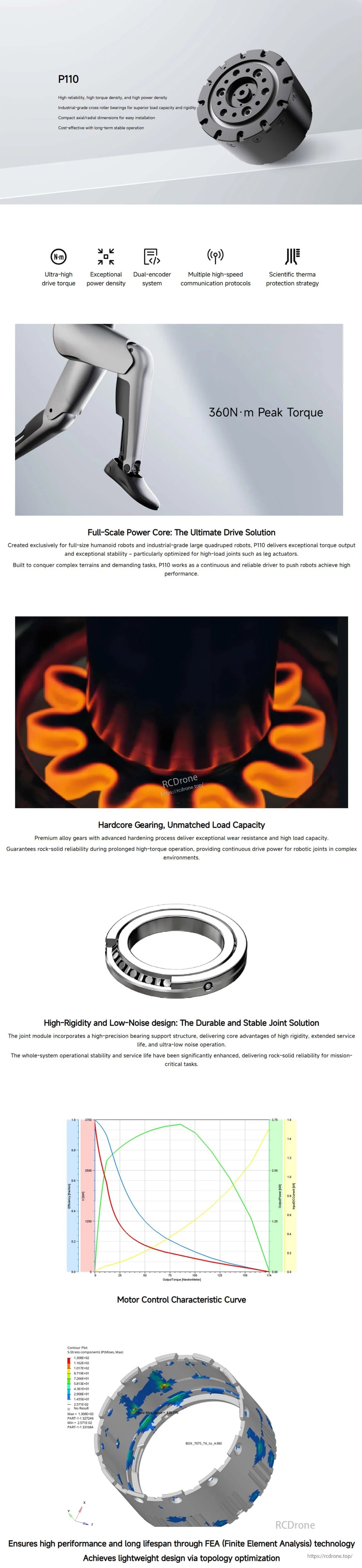
- Максимальный крутящий момент 360 Н·м
- Ультра-высокий крутящий момент и исключительная плотность мощности
- Система с двойным энкодером (разрешение энкодера мотора: 15 бит)
- Интерфейс связи: CAN / EtherCAT (несколько протоколов высокоскоростной связи)
- Научная стратегия термозащиты
- Жесткая передача для грузоподъемности (премиальные сплавные шестерни с усовершенствованным процессом закалки)
- Конструкция с высокой жесткостью и низким уровнем шума с высокоточной опорной структурой подшипника
- Технология FEA (метод конечных элементов) для высокой производительности и долгого срока службы; легкий дизайн при сохранении прочности
Применения
- Человекообразные роботы
- Роботизированные руки
- Экзоскелеты
- Четвероногие роботы
- AGV-автомобили
- ARU-роботы
Технические характеристики
| Максимальная скорость | 20 об/мин (блок питания 24В) |
| Вес модуля | 1900г |
| Номинальный крутящий момент | 90 Н·м |
| Пиковый крутящий момент | 360 Н·м |
| Размеры | Φ112*71.5 |
| Рабочее напряжение | 48V - 54V |
| Пиковый ток | 137 A |
| Интерфейс связи | CAN / EtherCAT |
| Конфигурация энкодера | Двойной энкодер |
| Разрешение энкодера мотора | 15 бит |
| Частота управления | 25,000 Гц |
| Рекомендуемая рабочая среда | -5°C ~ 40°C |
Для вопросов по интеграции, интерфейсу или конфигурации, свяжитесь с [email protected] or посетите https://rcdrone.top/.
Детали
Созданный для высоконагруженных человекоподобных и четвероногих суставов, MagicLab P110 сочетает в себе пиковый крутящий момент 360 Н·м с обратной связью от двойного энкодера и коммуникацией CAN/EtherCAT для точного и отзывчивого привода.
Related Collections




