Контроллер полета MATEK F405-TE Baro OSD - двойной датчик тока BEC 220A MicroSD Blackbox 3-8S PDB 30X30 мм для дронов FPV Freestyle
Контроллер полета MATEK F405-TE Baro OSD - двойной датчик тока BEC 220A MicroSD Blackbox 3-8S PDB 30X30 мм для дронов FPV Freestyle
MATEKSYS
Не удалось загрузить сведения о доступности самовывоза
ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
Использование: Транспортные средства и игрушки с дистанционным управлением
Модернизированные детали/аксессуары: Адаптер
Расходные материалы для инструментов: Аккумулятор
Периферийные устройства/устройства дистанционного управления: Пульт дистанционного управления
Рекомендуемый возраст: 12+y
Детали и аксессуары для радиоуправления: Регуляторы скорости
Происхождение: Материковый Китай
Номер модели: MATEK F405-TE
Материал: Композитный материал
Атрибуты полного привода: Сборка
Для типа транспортного средства: Вертолеты
Бренд: uuustore
Технические характеристики
- MCU: 168 МГц STM32F405RGT6
- IMU: ICM42688-P (SPI)
- Баро: SPL06-001 (I2C)
- OSD: AT7456E (SPI)
- Blackbox: слот MicroSD (SPI)
- 6 UART, 1 опция Softserial_Tx (INAV/BF)
- 11 выходов ШИМ (8 выходов Dshot, совместимых с BF/ArduPilot)
- 1x I2C
- 4x АЦП (VBAT, ток, RSSI, воздушная скорость)
- 1 запасной PINIO
- 4 отдельные силовые/сигнальные площадки ESC
- 1 группа контактов G/S1/S2/S3/S4 для сигнала ESC/GND 4 в 1
- Встроенный инвертор на UART2-RX для входа SBUS
- Переключаемый вход для двойной камеры
Спецификации PDB
- Вход: 9~36 В (3~8S LiPo)
- PDB: 4x 35A (макс. 4x 50A)
- BEC: 5 В 1,5 А
- BEC: 12 В, 2 А
- LDO 3,3 В: 200 мА
- Сенсор тока: 220 А, 3,3 В АЦП (шкала INAV/BF 150, ArduPilot 66,7 А/В)
- Делитель напряжения батареи 1К:20К (шкала INAV 2100, шкала BF 210, ArduPilot BATT_VOLT_MULT 21.0)
Прошивка
- ArduPilot: MatekF405-TE
- ИНАВ: MATEKF405TE_SD
- Бета-рейс: MATEKF405TE
Физический
- Монтаж: 30,5 x 30,5 мм, Φ4 мм с втулками Φ3 мм
- Размеры: 36 x 46 мм
- Вес: 10 г
Включая
- 1x F405-TE
- 6 силиконовых втулок от M4 до M3
- 1x Rubycon ZLH 35 В/470 мкФ (низкое ESR)

СХЕМА 5 В: встроенный BEC 12 В, 24 конд. RX6 и TX6: UART6_RX и S9/S10: выходы ШИМ (ESC, Servo) 4,4-4,8 В, макс. 80 ОмА, напряжение также подается при подключении через USB.
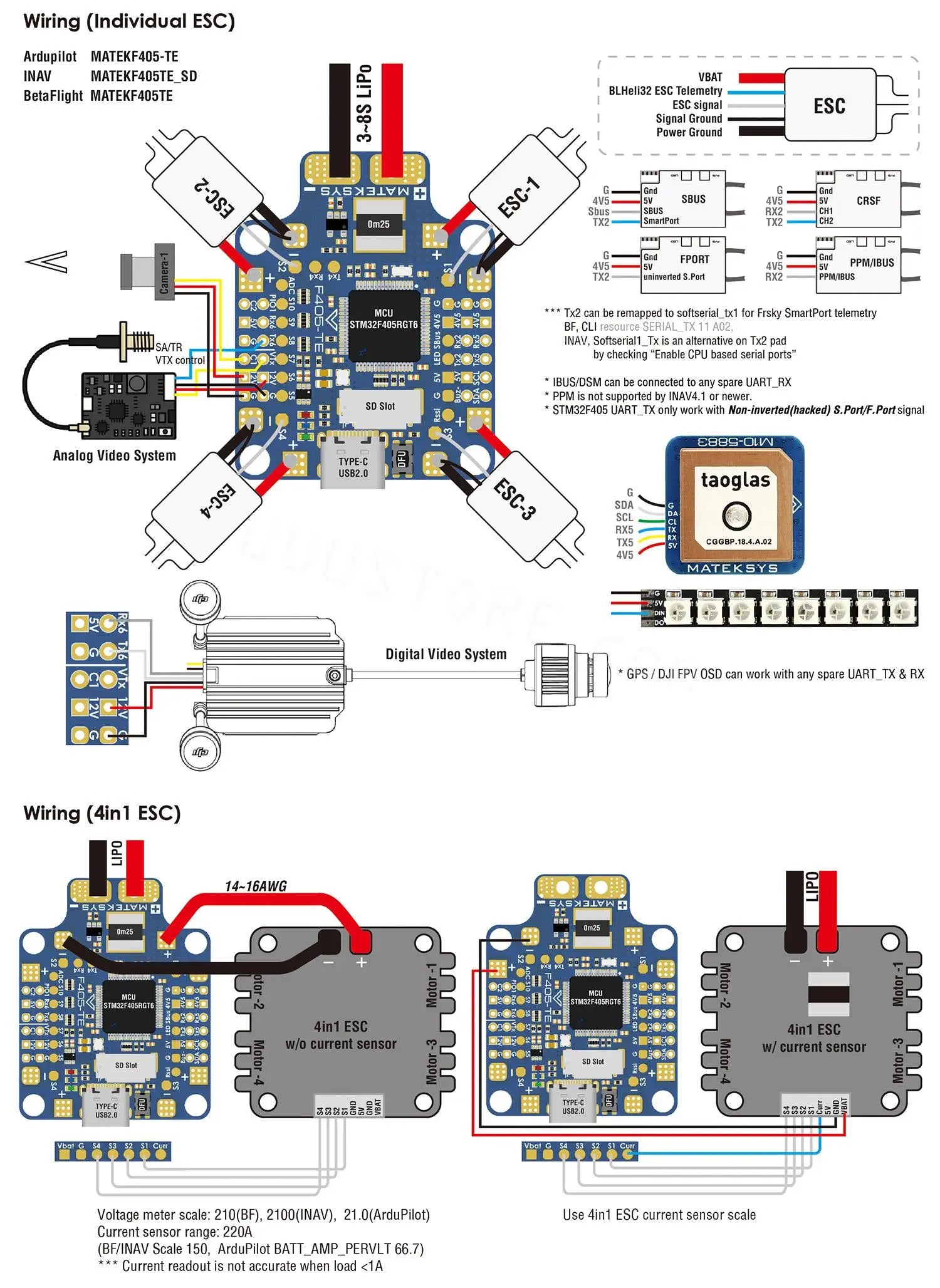
Полетный контроллер F405-TE имеет два неинвертированных порта, включая RX2, который можно переназначить на softserial1_TX. Кроме того, любой запасной порт UART_RX можно подключить к IBUS_IDSM. Однако обратите внимание, что PPM не поддерживается в INAV4.
Related Collections