GPS-модуль MATEK M10-L4-3100 — Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
GPS-модуль MATEK M10-L4-3100 — Mateksys AP_PERIPH GNSS u-blox MAX-M10S RM3100
MATEKSYS
Не удалось загрузить сведения о доступности самовывоза
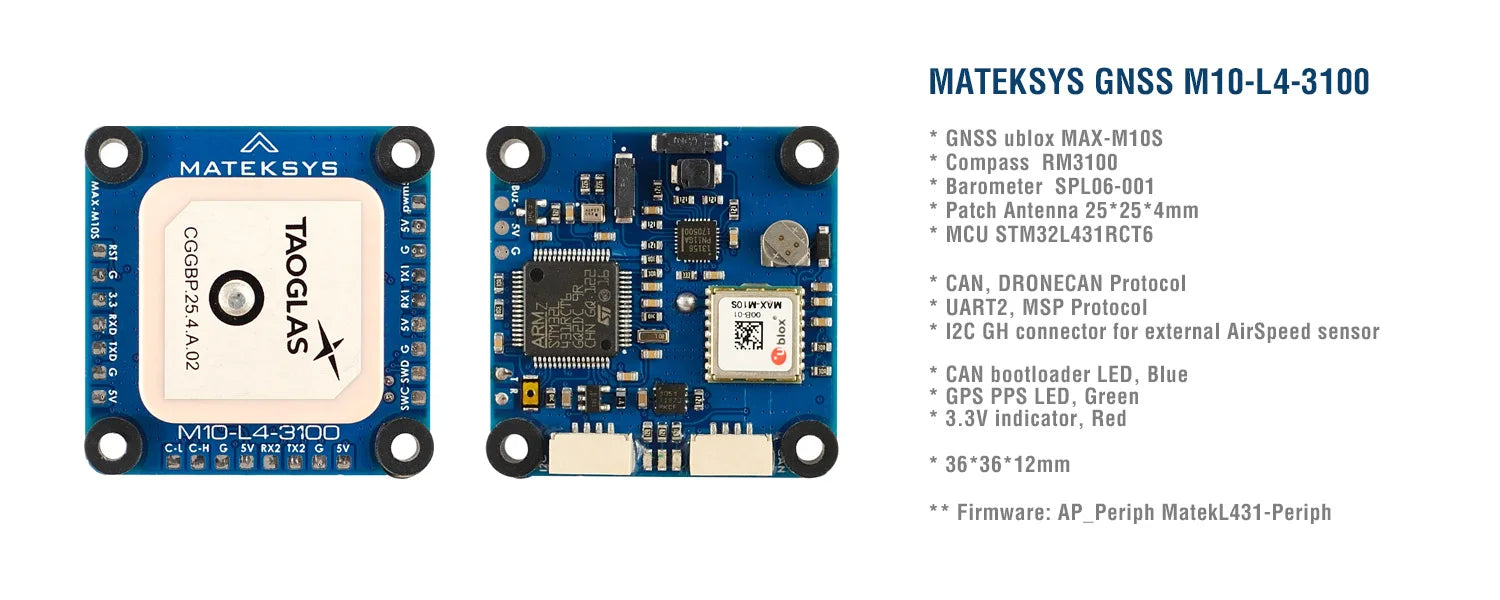
MATEK M10-L4-3100 - Mateksys AP_PERIPH ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ГНСС
Использование: Транспортные средства и игрушки с дистанционным управлением
Рекомендуемый возраст: 12+y,14+y,6-12y
Происхождение: Материковый Китай
Материал: Композитный материал
Бренд: MATEKSYS
AP_PERIPH ГНСС M10-L4-3100
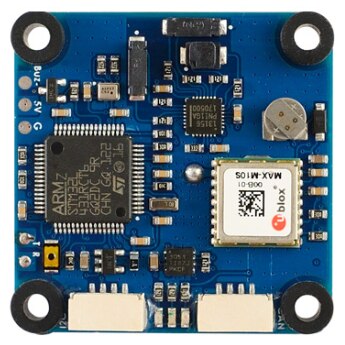
AP_Periph L431 CAN-узел, MAX-M10S, RM3100, SPL06-001, протокол DroneCAN и UART_MSP
-
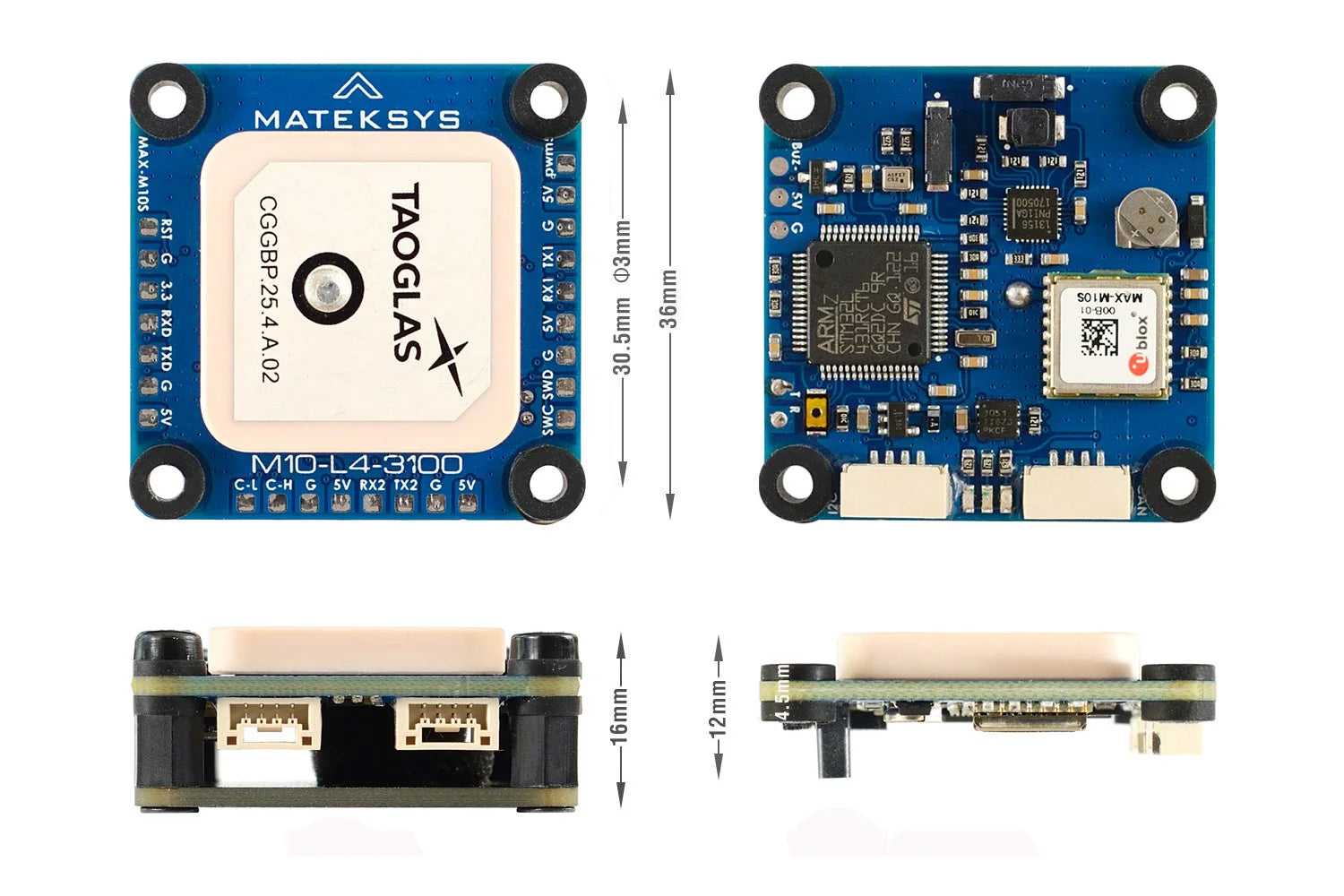
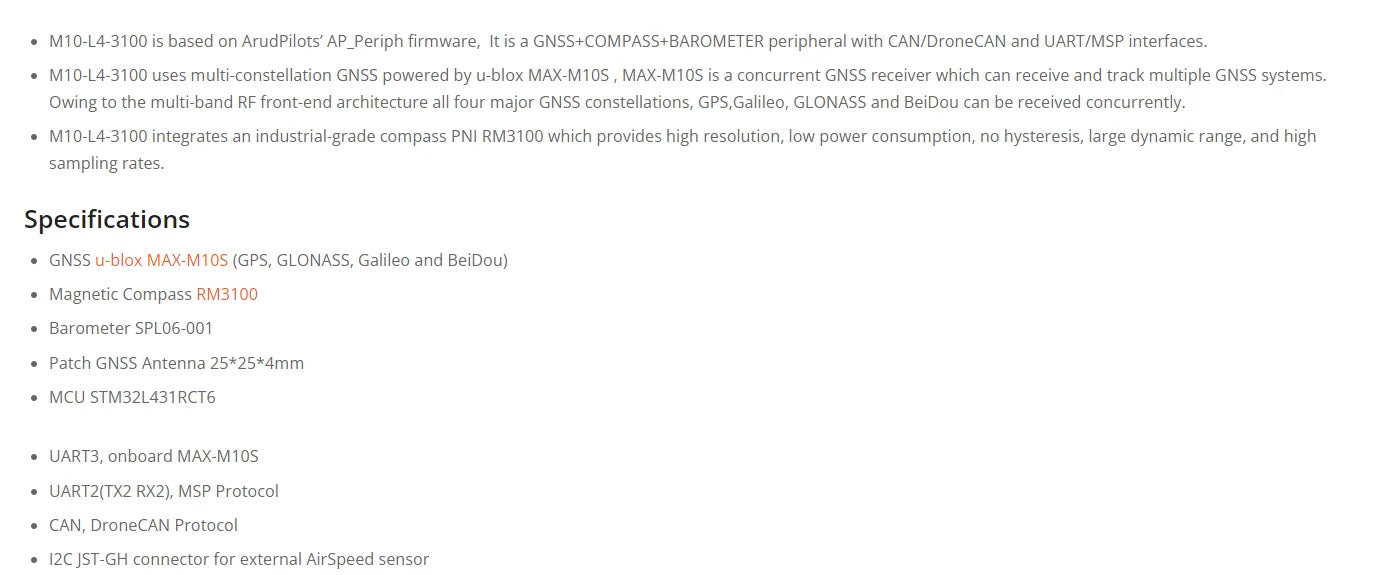
M10-L4-3100 основан на прошивке AP_Periph от ArudPilots. Это периферийное устройство GNSS+КОМПАС+БАРОМЕТР с интерфейсами CAN/DroneCAN и UART/MSP.
-
M10-L4-3100 использует GNSS с несколькими созвездиями на базе u-blox MAX-M10S, MAX-M10S — это одновременный приемник GNSS, который может принимать и отслеживать несколько систем GNSS. Благодаря многодиапазонной архитектуре RF-интерфейса все четыре основных созвездия GNSS, GPS, Galileo, GLONASS и BeiDou могут приниматься одновременно.
-
M10-L4-3100 оснащен компасом промышленного класса PNI RM3100, который обеспечивает высокое разрешение, низкое энергопотребление, отсутствие гистерезиса, большой динамический диапазон и высокую частоту дискретизации.

конфигурация по умолчанию на MAX-M1OS с ublox FWS. это одновременный прием GPS, Galileo и BeiDou BI с включенными QZSS и SBAS. ГЛОНАСС по умолчанию отключена Beidou B1I (1575,42 МГц) и не может быть включена одновременно.
Соединение CAN (протокол UAVCAN)
-
M10-L4-3100 5 В — FC 4,5 В ~ 5.3В
-
M10-L4-3100 CAN-H — FC CAN High
-
M10-L4-3100 CAN-L — FC CAN Low
-
M10-L4-3100 G — FC G/GND
Параметры FC UAVCAN (ArduPilot)
-
CAN_D1_PROTOCOL -> 1
-
CAN_P1_DRIVER -> 1
-
GPS_TYPE -> 9 (DroneCAN)
-
COMPASS_TYPEMASK -> 0 (убедитесь, что DroneCAN не отмечен)
————————————————————————–
Если вы подключаете датчик воздушной скорости I2C к порту I2C M10-L4-3100
-
ARSPD_TYPE -> 8 (UAVCAN)
-
ARSPD_USE -> 1
И вы должны установить параметры узла CAN для датчика воздушной скорости, подключенного к порту I2C M10-L4-3100
Планировщик миссий > Первоначальная настройка > Дополнительное оборудование > UAVCAN > Режим SLCan CAN1 > Параметры
-
MS4525 ARSP_TYPE -> 1 (по умолчанию в hwdef)
-
MS5525 ARSP_TYPE -> 3 поддерживает MS5525 только с адресом 0x77
-
SDP3X ARSP_TYPE -> 6
-
DLVR-L10D ARSP_TYPE -> 9
-
Запись и перезагрузка
————————————————————————–
Если вы подключаете 2812LED DIN к контактной площадке PWM5
-
NTF_LED_TYPES -> (убедитесь, что DroneCAN отмечен)
Режим SLCan CAN1 > Параметры
-
OUT5_FUNCTION 120
-
NTF_LED_TYPES 455
-
Прошивка AP_Periph должна быть «MatekL431-Periph», функция MSP отключена в «MatekL431-GPS»
Соединение UART (протокол MSP)
-
M10-L4-3100 5 В — FC 4,0–5,3 В
-
M10-L4-3100 TX2 — запасной UART_RX FC
-
M10-L4-3100 RX2 — запасной UART_TX FC (не обязательно)
-
M10-L4-3100 G — FC G/GND
Параметры FC ArduPilot (начиная с версии 4.1.x)
-
Serialx_PROTOCOL = 32 (MSP), где x — это ПОСЛЕДОВАТЕЛЬНЫЙ порт, используемый для подключения на автопилоте.
-
Serialx_BAUD = 115 где x — ПОСЛЕДОВАТЕЛЬНЫЙ порт, используемый для подключения на автопилоте.
-
ТИП GPS = 19 (MSP)
-
BARO_PROBE_EXT = 4096 (MSP Baro)
-
BARO_PRIMARY = 1 (если вы хотите использовать барометр MSP в качестве основного барометра, в противном случае оставьте значение по умолчанию)
-
COMPASS_TYPEMASK 0 (или убедитесь, что бит MSP не установлен)
INAV (начиная с версии 2.6) Параметры FC
-
M10-L4-3100 совместим с любым контроллером полета, поддерживаемым INAV, через запасной UART.
-
На вкладке «Порты» включите MSP на соответствующем UART, к которому подключен M10-L4-3100, НЕ ВКЛЮЧАЙТЕ «GPS» на этом UART. выберите Скорость передачи данных 115200.
-
функция GPS
-
установите gps_provider = MSP
-
установить mag_hardware = MSP
-
установить baro_hardware = MSP
-
set align_mag = CW90, если компас установлен ровно, стрелка направлена вперед, а стрелка контроллера полета также направлена вперед.
Related Collections