MATEK F405-WTE - ПОЛЕТНЫЙ КОНТРОЛЛЕР Mateksys
MATEK F405-WTE - ПОЛЕТНЫЙ КОНТРОЛЛЕР Mateksys
MATEKSYS
Не удалось загрузить сведения о доступности самовывоза
MATEK F405-WTE — ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ПОЛЕТНОГО КОНТРОЛЛЕРА Mateksys
Использование: Транспортные средства и игрушки с дистанционным управлением
Рекомендуемый возраст: 12+y,14+y
Происхождение: Материковый Китай
Материал: Композитный материал
Бренд: MATEKSYS
ПОЛЕТНЫЙ КОНТРОЛЛЕР F405-WTE
STM32F405RGT6, ICM42688P, SPL06, OSD, телеметрия ESP WIFI/приемник ELRS 2.4G, 6xUART, 12x PWM,1xI2C
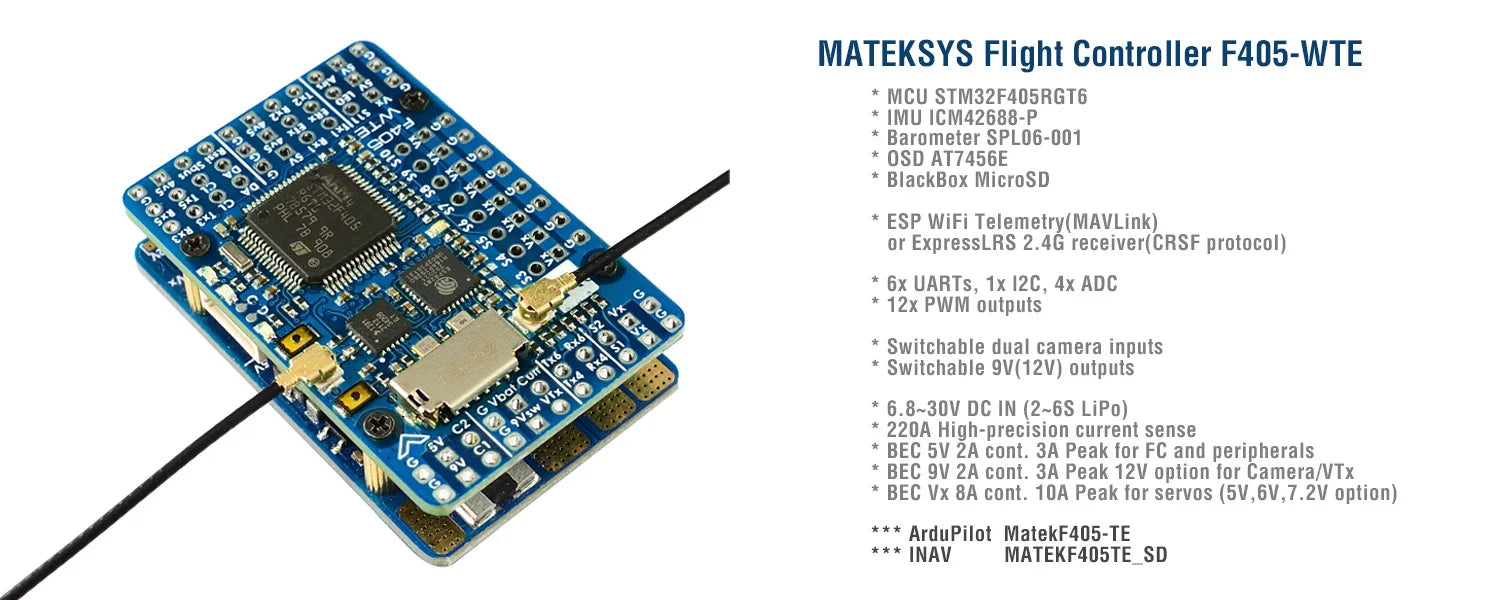
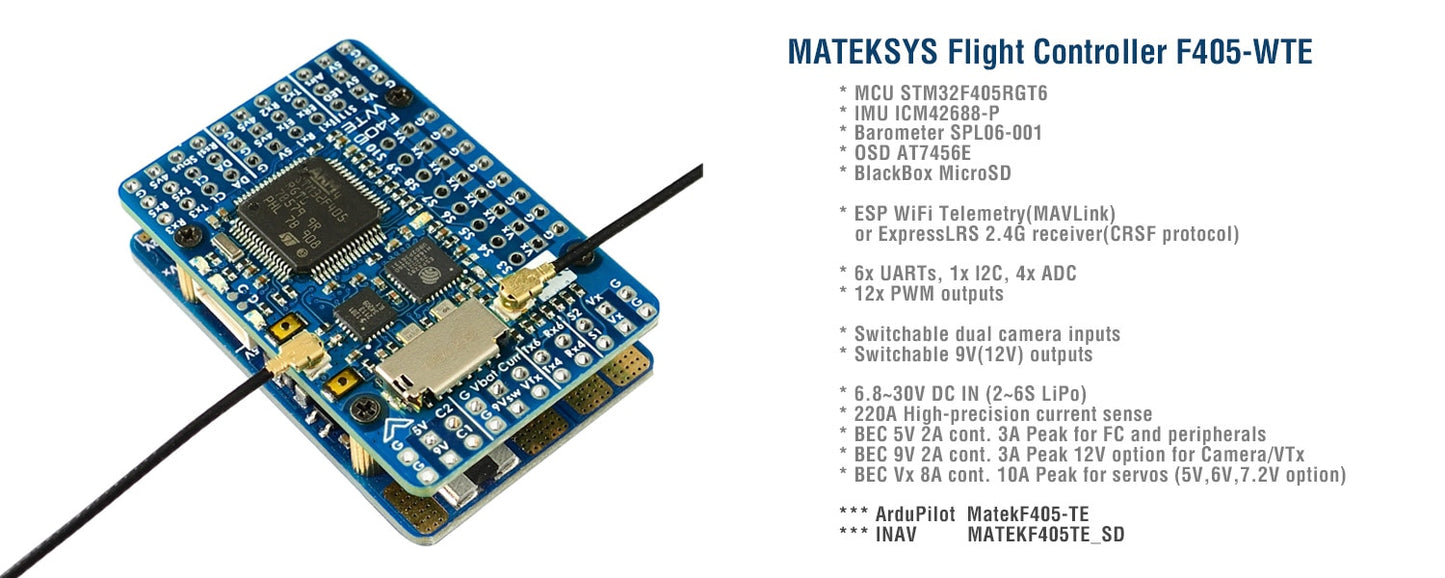
Контроллер полета MATEKSYS F4O5-WTE MCU STM3ZFAOSRGT6 IMU ICM42688-P Барометр SPLO6-001 OSD AT7456E BlackBox MicroSD 2 8 2 2 2 ESP WiFi Телеметрия (MAVLink) 2 или приемник ExpressLRS 2.4G (протокол CRSF) 6x UART, Ix I2C, 4x ADC 85 12x PWM-выходов Переключаемые входы для двух камер 4+

Характеристики FC
-
MCU: STM32F405RGT6, 168 МГц, флэш-память 1 МБ
-
IMU: ICM42688-P
-
Баро: SPL06-001
-
OSD: AT7456E
-
Blackbox: слот для карты MicroSD
-
Телеметрия ESP WiFi (MAVLink, 14 дБм)
-
Приёмник ExpressLRS 2.4G (протокол CRSF, телеметрия 12 дБм)
-
6 UART, 1 опция Softserial_Tx (INAV)
-
12 выходов ШИМ
-
1x I2C
-
4x АЦП (VBAT, ток, RSSI, воздушная скорость)
-
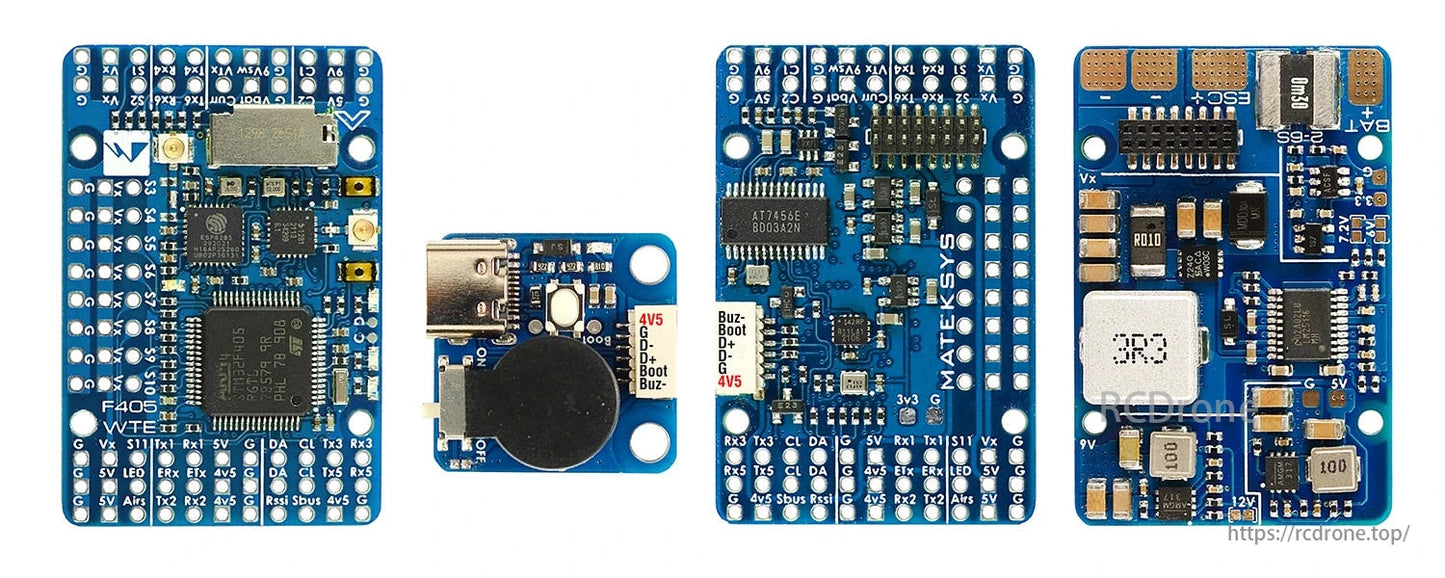
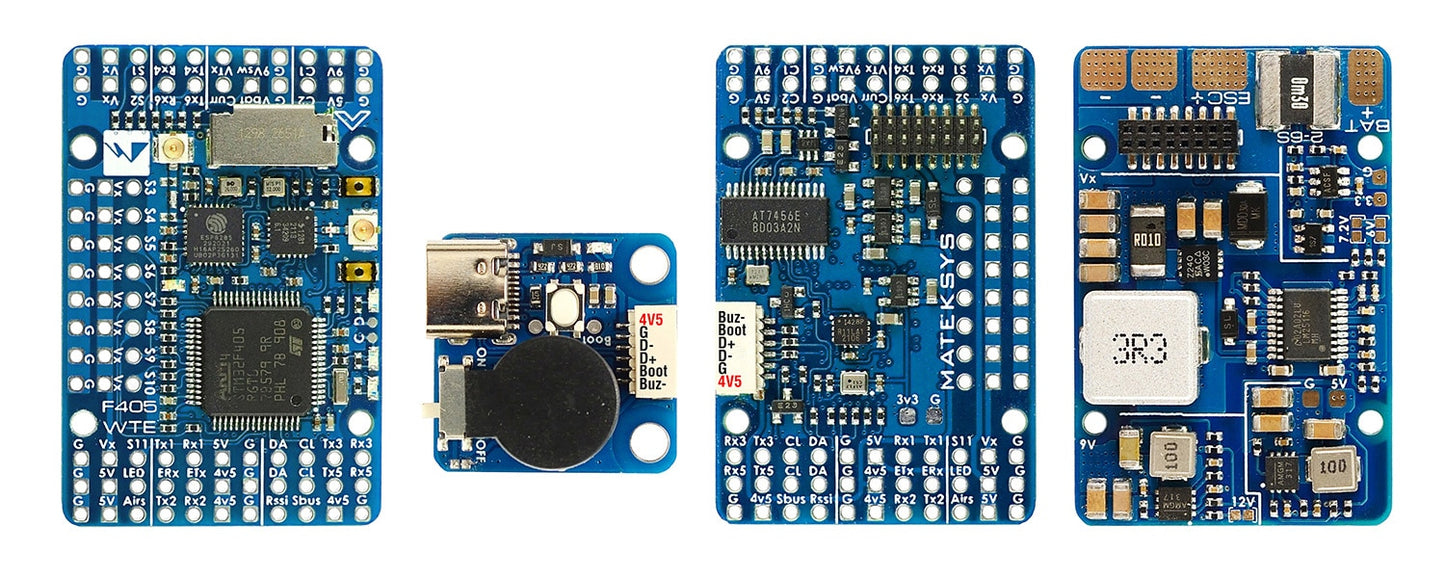
Удлинитель USB/звукового сигнала с типом C (USB2.0)
-
Переключатель двух входов камеры
-
9 В (12 В) для выключателя питания видеопередатчика
Прошивка FC
-
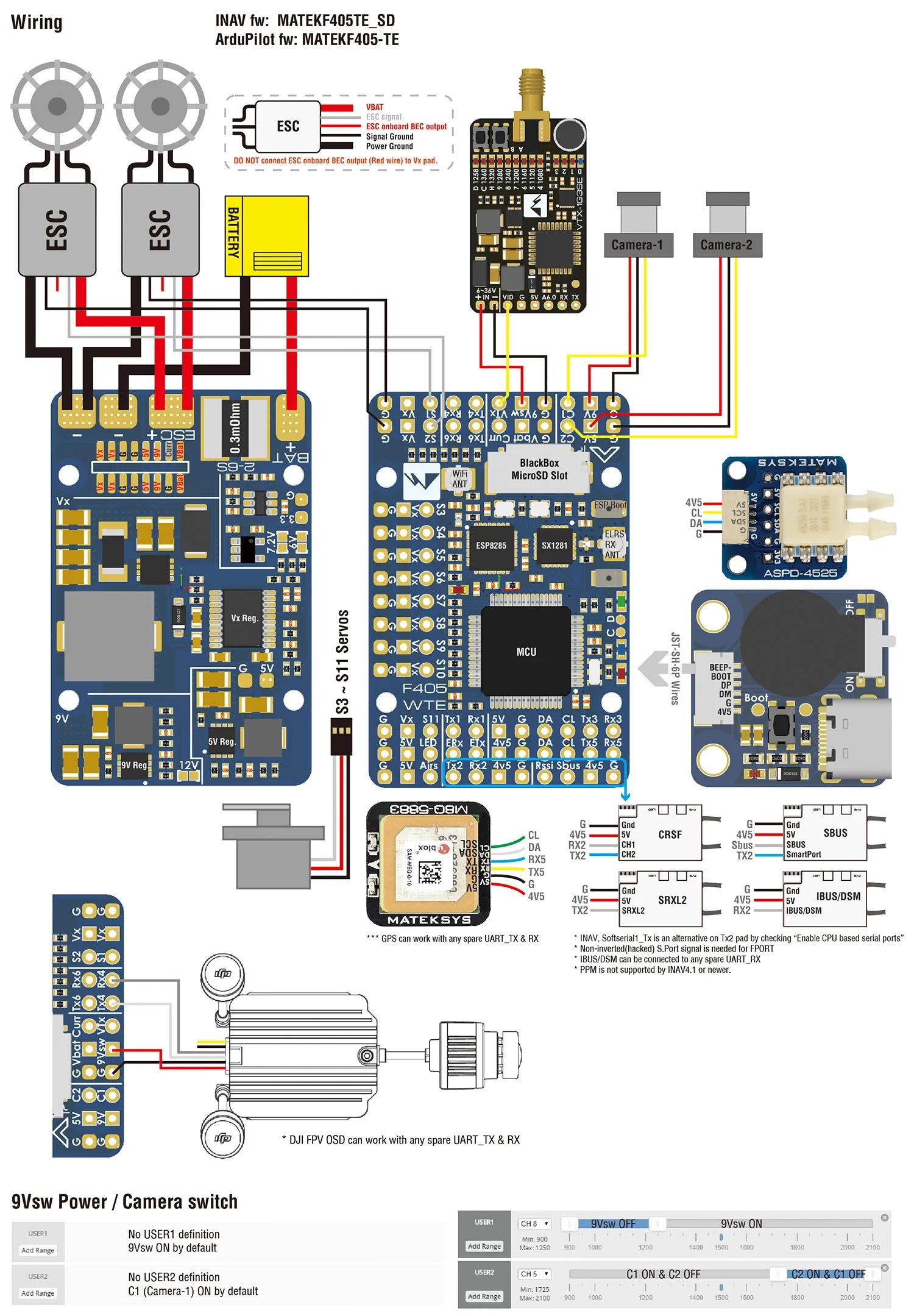
ArduPilot: MatekF405-TE
-
INAV: MATEKF405TE_SD (недоступно в конфигураторе INAV 4.x)
PDB
-
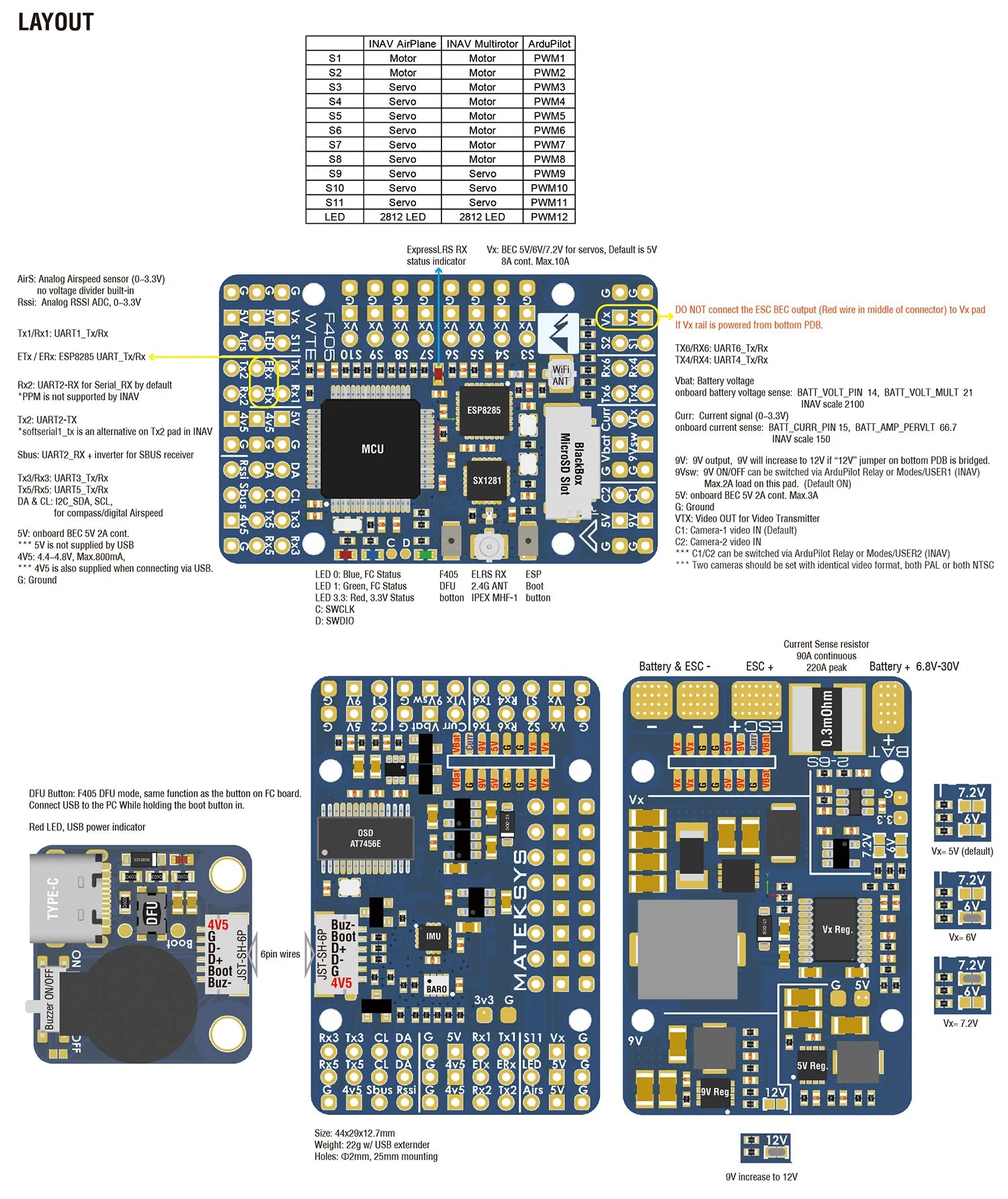
Диапазон входного напряжения: 6,8~30 В (2~6S LiPo)
-
1x панель управления ESC
-
Делитель напряжения батареи 1К:20К (масштаб 2100 в INAV, BATT_VOLT_MULT 21.0 в ArduPilot)
-
Токовый датчик: 220 А, 3,3 В АЦП (шкала 150 в INAV, 66,7 А/В в ArduPilot)
-
Чувствительный резистор: 90 А непрерывный, 220 А пиковый
Выход BEC 5 В
-
Предназначен для полетного контроллера, приемника, экранного меню, камеры, зуммера, светодиодной ленты 2812, зуммера, модуля GPS, AirSpeed
-
Постоянный ток: 2 А, макс. 3 А
Выход BEC 9 В/12 В
-
Предназначен для видеопередатчика, камеры, подвеса и т. д.
-
Постоянный ток: 2 А, макс. 3 А
-
Опция 12 В с перемычкой
-
для стабильного выхода 9В/12В входное напряжение должно > выходного напряжения +1В
Выход BEC Vx
-
Предназначен для сервоприводов
-
Настройка напряжения, 5 В по умолчанию, 6 В или 7,2 В через перемычку
-
Постоянный ток: 8 А, макс. 10 А
-
для стабильного выхода Vx входное напряжение должно > напряжения Vx +1 В
Выход BEC 3,3 В
-
Предназначен для модуля Baro/Compass и внешнего 3.Периферийные устройства 3 В
-
Линейный регулятор
-
Постоянный ток: 200 мА
Физический
-
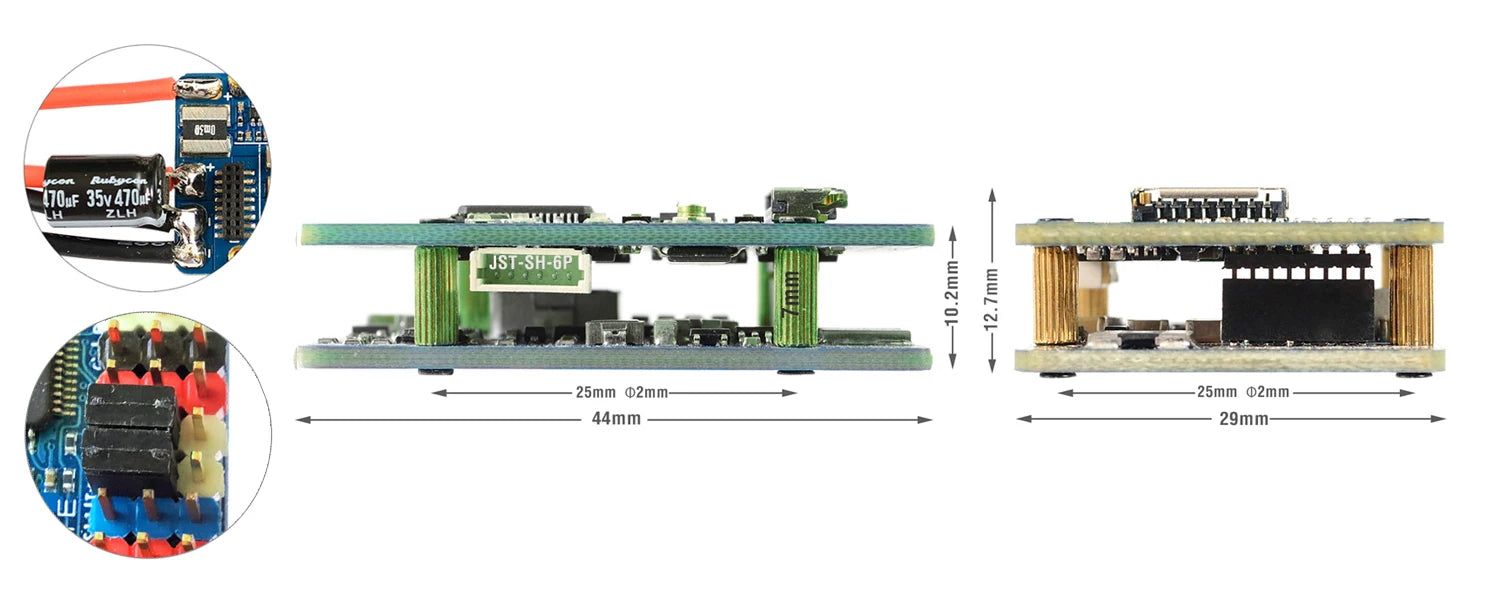
Монтаж: 25 x 25 мм, Φ2 мм
-
Размеры: 44 x 29 x 12,7 мм
-
Вес: 22 г с адаптером USB/зуммера
Включая
-
1x F405-WTE
-
1 удлинитель USB (Type-C)/звуковой сигнал (пассивный зуммер) + кабель JST-SH-6P на JST-SH-6P длиной 20 см для USB-удлинителя.
-
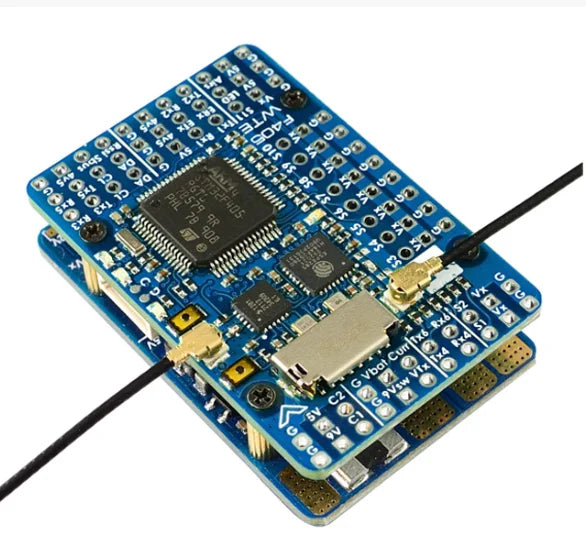
2 антенны IPEX-MHF1 2.4G
-
1x конденсатор Rubycon ZLH 35 В, 470 мкФ
-
Выводы Dupont 2.54 (плата поставляется в распаянном виде)
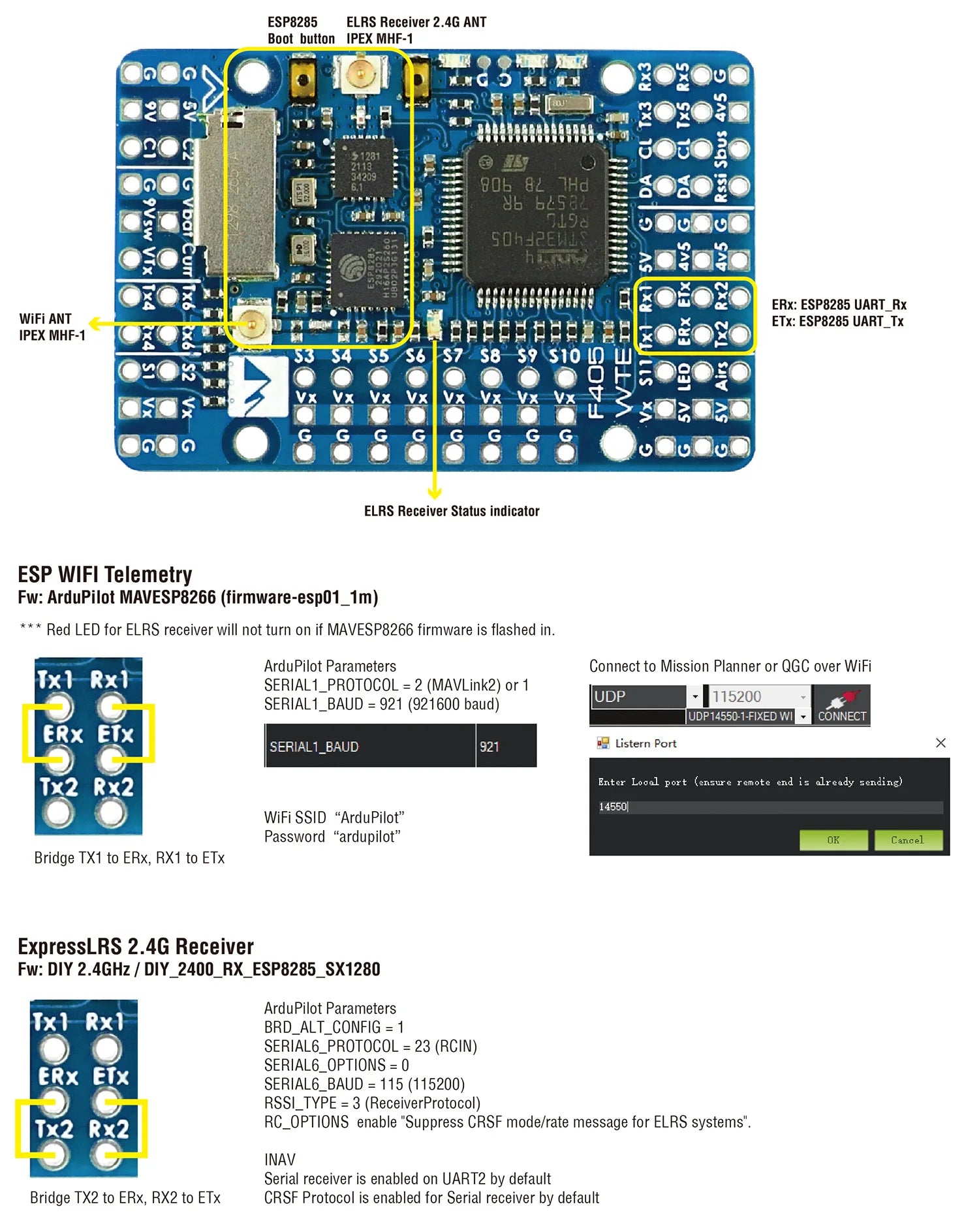
ArduPilot ESP8266 Wi-Fi телеметрия
-
https://ardupilot.org/copter/docs/common-esp8266-telemetry.html
-
Инструмент: ESP_NodeMCU-PyFlasher.exe
-
Прошивка: firmware-esp01_1m.bin
-
Прошивка с помощью ESP_NodeMCU-PyFlasher
-
Подключите ESP8285(ETx, ERx) к адаптеру USB-TTL, при этом ETx на F405-WTE подключится к Rx на USB-TTL, а ERx подключится к Tx USB-TTL. Подключите 4v5 и GND F405-WTE к 5 В и GND USB-TTL
-
Подключите адаптер USB-TTL к ПК, нажав и удерживая кнопку загрузки ESP8285.
-
откройте ESP_NodeMCU-PyFlasher
-
выберите Последовательный порт модуля USB-TTL, загрузите прошивку, выберите «Двойной выход (DOUT)» и «Да. Стирает все данные“
-
нажмите «Flash NodeMCU»
-
после перепрошивки выключите питание, затем включите F405-WTE через USB или аккумулятор.
-
Подождите несколько секунд, найдите SSID Wi-Fi «ArduPilot» и пароль «ardupilot»
-
Советы: красный светодиод приемника ELRS не загорится, если установлена прошивка MAVESP8266.
-
Приемник ExpressLRS 2.4G
-
ExpressLRS AUX1-AUX8 не являются каналами с полным разрешением. https://www.expresslrs.org/2.0/software/switch-config/
-
Прошивка через WiFi
-
Включите F405-WTE через USB, светодиод приемника (красный) сначала будет мигать медленно, а через 30 секунд он должен мигать быстро, указывая на то, что он находится в режиме точки доступа Wi-Fi.
-
Более подробные действия можно найти на этой странице.
-
Цель: Сделай сам 2,4 ГГц / DIY_2400_RX_ESP8285_SX1280
-
-
Прошивка через UART
-
Подключите ESP8285(ETx, ERx) к адаптеру USB-TTL, при этом ETx на F405-WTE подключится к Rx на USB-TTL, а ERx подключится к Tx USB-TTL. Подключите 4v5 и GND F405-WTE к 5 В и GND USB-TTL.
-
Подключите адаптер USB-TTL к ПК, нажав и удерживая кнопку загрузки ESP8285.
-
Выберите цель Сделай сам 2.4 ГГц / DIY_2400_RX_ESP8285_SX1280 и “
5039>UART» для метода прошивки, установите фразу привязки и Параметры прошивки и после этого нажмите Создать и прошить.
-
Соединение UDP с конфигуратором INAV через WiFi
-
Инструмент: ESP_NodeMCU-PyFlasher.exe
-
Прошивка: MSPWifiBridge_ESP-01.bin скомпилировано на основе github.com/Scavanger/MSPWifiBridge
-
Прошивка с помощью ESP_NodeMCU-PyFlasher
-
Подключите ESP8285(ETx, ERx) к адаптеру USB-TTL, при этом ETx на F405-WTE подключите к Rx на USB-TTL, а ERx подключите к Tx USB-TTL. Подключите 4v5 и GND F405-WTE к 5 В и GND USB-TTL
-
Подключите адаптер USB-TTL к ПК, нажав и удерживая кнопку загрузки ESP8285.
-
откройте ESP_NodeMCU-PyFlasher
-
выберите Последовательный порт модуля USB-TTL, загрузите прошивку, выберите «Двойной выход (DOUT)» и «Да. Стирает все данные“
-
нажмите «Flash NodeMCU»
-
после перепрошивки выключите питание, затем включите F405-WTE через USB или аккумулятор.
-
Подождите несколько секунд, найдите SSID Wi-Fi «MSPWifiBridge» и пароль «123456789»
-
Если автоматическая переадресация на страницу конфигурации отсутствует, перейдите к http://192.168.4.1 вручную. Стандартные данные для входа: Имя пользователя: admin, Пароль: 123456789
-
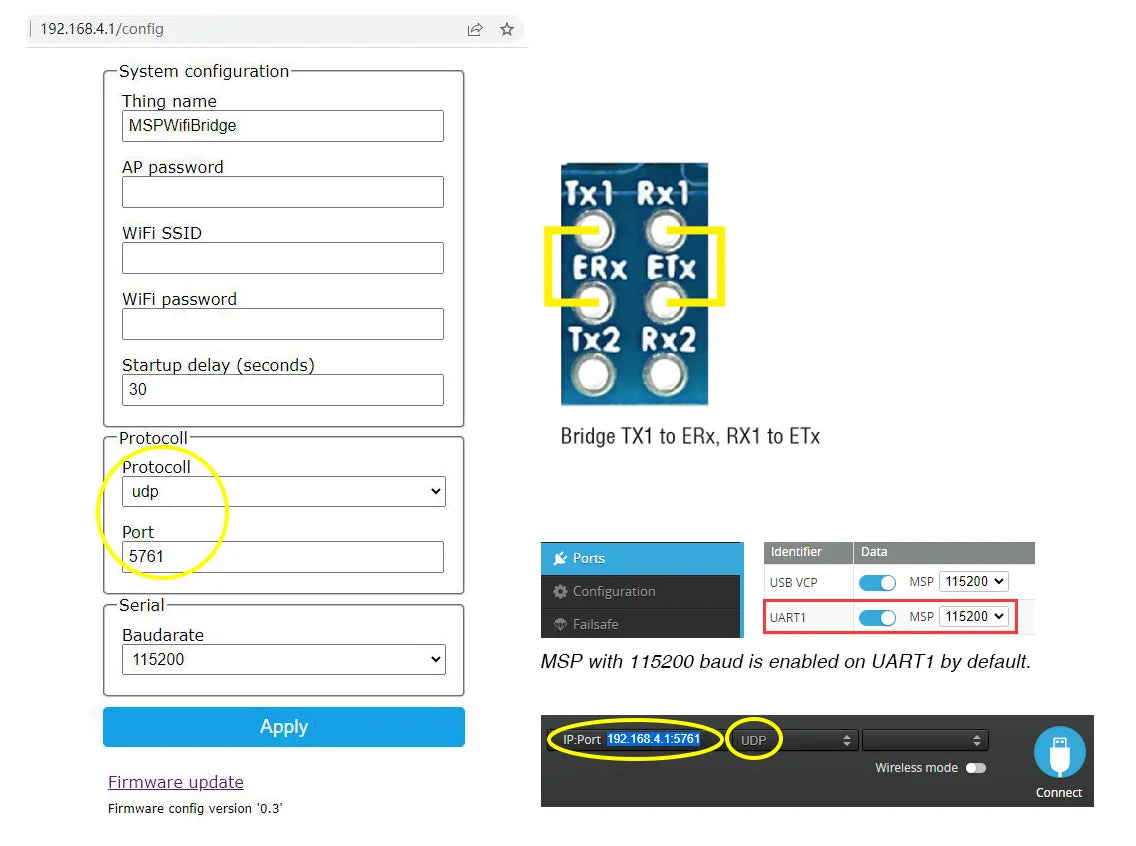
192.168.4.1/config Конфигурация системы Thing_name MSPWifiBridge Пароль точки доступа Ixl Rx| WiFi SSID ERx ETx Пароль WiFi Tx2 Rx2 Задержка Staz (секунд 30 Протоколl Мост TX1 к erx, RXI к ETx Протоколl udp Порт 5761 Ponts Identifier Data USB VC?
Related Collections