


Полётный контроллер MATEKSYS H7A3-SLIM - ICM42688P - 30x30
Полётный контроллер MATEKSYS H7A3-SLIM - ICM42688P - 30x30
MATEKSYS
Не удалось загрузить сведения о доступности самовывоза
Контроллер полета MATEKSYS H7A3-SLIM предлагает высокую производительность в компактном дизайне 30x30мм. Он оснащен микроконтроллером STM32H7A3RIT6, процессором Cortex-M7 на 280 МГц, 1,4 МБ ОЗУ и 2 МБ флеш-памяти. С IMU ICM42688P, барометром SPL06-001, OSD AT7456E и черным ящиком с флеш-памятью на 128 МБ, он обеспечивает точные данные и достаточное количество логирования. Контроллер включает 6 UART, 11 выходов PWM, 1 I2C, 1 CAN порт и 4 канала ADC. Также имеются три светодиода состояния, порт USB Type-C и переключаемый выход 9В. С монтажным шаблоном 30,5 x 30,5 мм, отверстиями 4 мм, прокладками 3 мм и весом всего 7 г, он идеально подходит для FPV гонок и фристайла. В комплект входит 3D файл в формате step для индивидуальной интеграции.
Особенности
- Дисплей на экране
- Крепление 30x30
- Компактный дизайн
- Подключение
- Легкий вес
Технические характеристики
Технические характеристики
- MCU: STM32H7A3RIT6, 280MHz Cortex-M7, 1.4MB RAM, 2MB Flash
- IMU: ICM42688P
- Барометр: SPL06-001
- OSD: AT7456E
- Чёрный ящик: 128MB Flash (1G-бит NAND)
- 6x Uarts (1,2,3,4, 5, 6) с встроенной инверсией.
- 11x PWM выходов
- 1x I2C
- 1x CAN
- 4x ADC (VBAT, Ток, VB2, Cur2)
- 3x светодиодов для статуса FC (Синий, Красный) и индикатор 3.3V (Красный)
- USB Type-C(USB2.0)
- 8x PWM выходов на 2x JST-SH1.0_8pin разъеме для 2x 4in1 ESC
- 1x JST-GH1.25_4pin разъем (5V/CAN-H/CAN-L/G)
- 9V выход с переключателем ВКЛ/ВЫКЛ
- Цифровое видео OSD поддерживается любым свободным UART
Питание
- Vbat Вход: 6~36V (2~8S LiPo)
- BEC: 5V 2A непрерывно. (Макс. 3A)
- BEC: 9V 2A непрерывно. (Макс. 3A)
- LDO 3.3V: Макс. 200mA
- Нет встроенного датчика тока
- ADC VB2 площадка поддерживает Макс. 69V (делитель напряжения: 1K:20K)
FC Прошивка
- ArduPilot: MATEKH7A3 (4.6 или новее)
- ArduPlane https://firmware.ardupilot.org/Plane/beta/MatekH7A3/
- ArduCopter &https://firmware.ardupilot.org/Copter/beta/MatekH7A3/
- Прошивка с помощью STM32CubeProgrammer
Физические
- Крепление: 30.5 x 30.5 мм, Φ4 мм с резиновыми втулками Φ3 мм
- Размеры: 36 x 36 x 5 мм
- Вес: 7 г
- 3D шаг H7A3-SLIM_step.zip
Включая
- 1x H7A3-SLIM
- 6x Силиконовые втулки M4 до M3
- 2x JST-SH1.0_8pin кабель, 5см, & 8pin разъемы
- 1x JST-GH-4P к JST-GH-4P кабель для CAN порта, 20см
Детали

Контроллер полета MATEKSYS H7A3-SLIM использует STM32H7A3 MCU с ICM42688P IMU и портом USB-C в монтажном шаблоне 30.5мм.

Контроллер полета MATEKSYS H7A3-SLIM использует компактную компоновку 30x30 с портом USB-C и четко обозначенными площадками для аккуратной проводки.

MATEKSYS H7A3-SLIM использует два разъема JST-SH 1.0 8-pin плюс 4-pin порт JST-GH и USB Type-C для аккуратной проводки и легкой настройки.

MATEKSYS H7A3-SLIM использует четко обозначенные площадки для пайки и порты для подключения камеры/VTx видео, UART, CAN и питания.
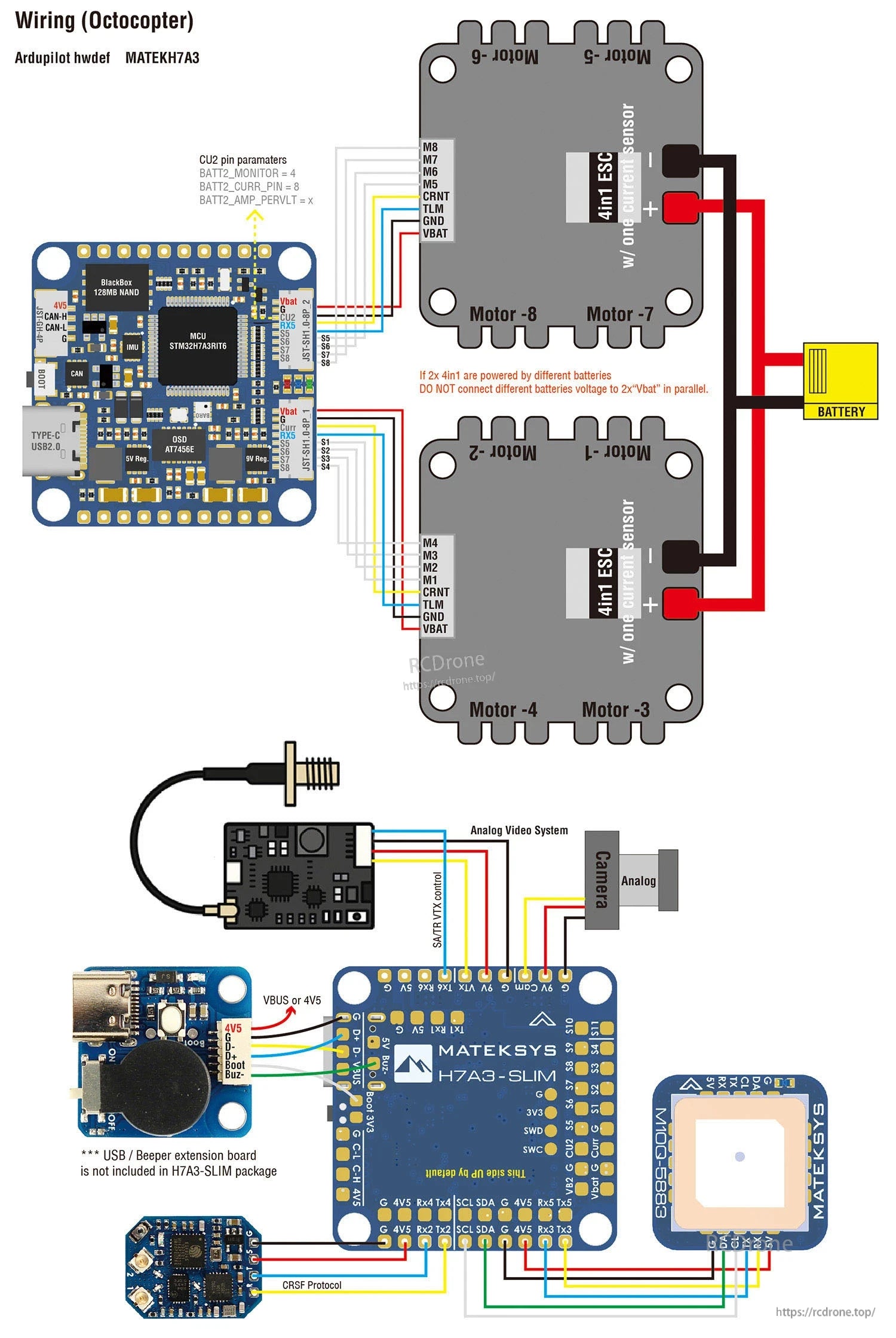
MATEKSYS H7A3-SLIM использует четко обозначенные площадки для подключения двойных 4-в-1 ESC, питания VBAT, GPS, приемника и аналоговых видеокомпонентов.

Картирование ArduPilot
| ArduPilot | ||||||
| ШИМ | S1 | ШИМ1 GPIO50 | 5 В совместимый I/O | TIM1_CH2 | DMA/Bi-DShot | Группа1 |
| S2 | ШИМ2 GPIO51 | 5 В совместимый I/O | TIM1_CH3 | DMA/Bi-DShot | ||
| S3 | ШИМ3 GPIO52 | 5 В совместимый I/O | TIM2_CH1 | DMA/Bi-DShot | Группа2 | |
| S4 | ШИМ4 GPIO53 | 5 В совместимый I/O | TIM2_CH2 | DMA/Bi-DShot | ||
| S5 | ШИМ5 GPIO54 | 5 В совместимый I/O | TIM3_CH3 | DMA/Bi-DShot | Группа3 | |
| S6 | PWM6 GPIO55 | 5 В совместимый I/O | TIM3_CH4 | DMA/Bi-DShot | ||
| S7 | PWM7 GPIO56 | 5 В совместимый I/O | TIM3_CH1 | DMA/Bi-DShot | ||
| S8 | PWM8 GPIO57 | 5 В совместимый I/O | TIM3_CH2 | DMA/Bi-DShot | ||
| S9 | PWM9 GPIO58 | 5 В совместимый I/O | TIM4_CH1 | DMA/DShot | Группа4 | |
| S10 | PWM10 GPIO59 | 5 В совместимый I/O | TIM4_CH2 | DMA/DShot | ||
| S11 | PWM11 GPIO60 | 5 В допустимый I/O | TIM16_CH1 | DMA/DShot | Группа5 | |
| PWM1~PWM11 поддерживают Dshot и PWM.Однако смешивание Dshot и обычной работы PWM для выходов ограничено группами, т.е. включение Dshot для выхода в группе требует, чтобы ВСЕ выходы в этой группе были настроены и использовались как Dshot, а не как PWM выходы. Если сервопривод и мотор смешаны в одной группе, убедитесь, что эта группа работает на самой низкой частоте PWM в соответствии со спецификацией сервопривода. То есть, если сервопривод поддерживает макс. 50 Гц, ESC должен работать на 50 Гц в этой группе. |
||||||
| PINIO | 9V переключатель | GPIO81 | RELAY1_PIN | 81 | ||
| ADC | Vbat площадка | BATT_VOLTAGE_SENS | 6~36V | BATT_VOLT_PIN BATT_VOLT_MULT |
10 21.0 |
|
| Ток площадка | BATT_CURRENT_SENS | 0~3.3В | BATT_CURR_PIN BATT_AMP_PERVLT |
11 X |
||
| VB2 Pad | BATT2_VOLTAGE_SENS | 0~69В | BATT2_VOLT_PIN BATT2_VOLT_MULT |
18 21.0 |
||
| CU2 Pad | BATT2_CURRENT_SENS | 0~3.3V | BATT2_CURR_PIN BATT2_AMP_PERVLT |
8 X |
||
| I2C | SCL/SDA | I2C3 | 5V совместимые I/O | на борту Baro SPL06-001 | Адрес | 0x76 |
| Цифровая скорость воздуха I2C MS4525 DLVR-L10D |
ARSPD_BUS ARSPD_TYPE ARSPD_TYPE |
0 1 9 |
||||
| Магнитометр | COMPASS_AUTODEC | 1 | ||||
| CAN | C-H/C-L | CAN2 | 5V совместимые I/O | CAN | CAN_D1_PROTOCOL CAN_P1_DRIVER |
1 1 |
МОЖНО GPS МОЖНО Компас МОЖНО Датчик скорости |
ТИП_GPS МАСКА_ТИПА_КОМПАСА ТИП_АРСПД |
9 0 8 |
| UART | USB | USB | консоль | ПРОТОКОЛ_SERIAL0 | 2 | |
| TX1 RX1 | USART1 с DMA | 5 В совместимый I/O | Телеметрия | ПРОТОКОЛ_SERIAL1 | 2 | |
| TX2 RX2 | USART2 с DMA | 5 В совместимый I/O | RC вход/Приемник | ПРОТОКОЛ_SERIAL2 | 23 | |
| TX3 RX3 | USART3 с DMA | 5 В совместимый I/O | GPS | СЕРИЙНЫЙ3_ПРОТОКОЛ | 5 | |
| TX4 RX4 | UART4 без DMA | Входы/выходы с допустимым уровнем 5 В | Резерв | СЕРИЙНЫЙ4_ПРОТОКОЛ | -1 | |
| TX5 RX5 | UART5 без DMA | Входы/выходы с допустимым уровнем 5 В | Резерв | СЕРИЙНЫЙ5_ПРОТОКОЛ | -1 | |
| TX6 RX6 | USART6 без DMA | Входы/выходы с допустимым уровнем 5 В | Резерв | СЕРИЙНЫЙ6_ПРОТОКОЛ | -1 | |
RC ВХОД
RC вход настроен на USART2(СЕРИЙНЫЙ2).Он поддерживает все последовательные протоколы RC. SERIAL2_PROTOCOL=23 по умолчанию.
- PPM не поддерживается.
- CRSF требует подключения Tx2 & Rx2 и установки SERIAL2_OPTIONS на “0” (по умолчанию).
- SBUS/DSM/SRXL подключается к пину Rx2, но SBUS требует, чтобы SERIAL2_OPTIONS были установлены на “3”.
- FPort требует подключения к Tx2 и установки SERIAL2_OPTIONS на “7”. Если телеметрия не работает, попробуйте установить SERIAL7_OPTIONS = 135.
- SRXL2 требует подключения к Tx2 и автоматически предоставляет телеметрию. Установите SERIAL2_OPTIONS на “4”.
- Любой UART также может быть использован для подключения RC-систем в ArduPilot и совместим со всеми протоколами, кроме PPM. См. Системы радиоуправления для получения подробной информации.
Реле ArduPilot (PINIO)
- 9V выход ВКЛ по умолчанию
- PC13 PINIO1 ВЫХОД GPIO(81) //9V питание switche.g.
- RELAY1_FUNCTION 1
- RELAY1_PIN 81 // PINIO1 GPIO
- RC7_OPTION 28 //Реле Включить/Выключить, Используйте CH7 передатчика для установки 9V ВКЛ/ВЫКЛ
Настроенная функция будет активирована, когда значение pwm вспомогательного переключателя станет выше 1800. Она будет деактивирована, когда значение упадет ниже 1200.
Проверьте значение pwm, отправляемое от передатчика, когда переключатель находится в высоком и низком положении, используя экран Начальной настройки >> Обязательное оборудование >> Калибровка радиосигнала.Если он не поднимается выше 1800 или ниже 1200, лучше всего отрегулировать конечные точки сервопривода в передатчике.
Related Collections


