

MUWEIDU L6020 Мотор 24В 200 об/мин, серводвигатель с энкодером 18 бит, RS485/CAN, номинальный крутящий момент 0,58 Н·м
MUWEIDU L6020 Мотор 24В 200 об/мин, серводвигатель с энкодером 18 бит, RS485/CAN, номинальный крутящий момент 0,58 Н·м
MUWEIDU
Не удалось загрузить сведения о доступности самовывоза
Обзор
MUWEIDU L6020 Двигатель - это низкоскоростной, высокоточный бесщеточный постоянный ток серводвигатель , предназначенный для управления скоростью/позицией. Он интегрирует 18-битный однооборотный абсолютный энкодер и поддерживает CAN или RS485 связь для робототехнических и автоматизированных систем, которые требуют стабильной, плавной работы. Для выбора продукта или технической поддержки, свяжитесь с [email protected] or посетите https://rcdrone.top/.
Ключевые особенности
- Серия бесщеточных DC моторов с низкой скоростью & высокой точности
- Дизайн с полым валом
- Стабильная & плавная работа
- Интегрированная высокая точность; легкая конструкция; высокая производительность крутящего момента
- Соответствует требованиям управления положением с низкой скоростью и высокой точностью
- Материалы сердечника мотора: премиальные листы силиконовой стали и высокотемпературные высокопроизводительные постоянные магниты
- Многоступенчатый дизайн внешнего ротора для повышения крутящего момента в условиях ограниченного пространства
- Бесщеточная структура в сочетании с высокопроизводительными подшипниками для более плавного вращения и более длительного срока службы
- Высокоточные, низкотемпературные сплавные резисторы для точного измерения и управления током
- Полный N-канальный трехфазный полный мостовой драйвер с низким внутренним сопротивлением и высоким выходным током
- Поддерживает бесшовное переключение между режимами управления моментом, скоростью и положением
- Основной контроллер: 32-битный МК с рабочей частотой 72 МГц
- Входное напряжение: 12~60 В (привод)
- Однократная калибровка, нулевая позиция никогда не теряется
- Сертифицировано CE (как указано)
Технические характеристики
| Модель | L6020 |
| Номинальное напряжение | 24В |
| Номинальный ток | 1.4A |
| Пиковая мощность | 12.6W |
| Номинальный крутящий момент | 0.58N.m |
| Пиковый крутящий момент | 1.4N. |
| Рейтинг скорости | 200 об/мин |
| Энкодер | 18 бит |
| Инерция ротора | 394 гсм² |
| Мониторинг температуры мотора | ДА |
| Режимы управления | Скорость/Позиция |
| Протокол связи | RS485 или CAN |
| Общие размеры | Φ58мм×21мм |
| Вес | 185 г |
Определение интерфейса
- ID SWITCH
- CAN/RS485
- B/L: RS485-B или CAN-L
- A/H: RS485-A или CAN-H
- V-: Отрицательное питание
- V+: Положительное питание
- T: Передатчик UART
- R: Приемник UART
- G: Сигнальный GND
Сценарии применения
- Человекообразные роботы
- Роботизированные руки
- Экзоскелеты
- Четвероногие роботы
- AGV-автомобили
- Роботы ARU
- 360° камера
- Ручная камера
- LiDAR
- Стабилизатор (гимбал)
Программное обеспечение для ПК / Режимы управления (как указано)
Доступна настройка параметров / тестирование / обновление прошивки на базе ПК.Совместим с платформами разработки с открытым исходным кодом, включая ПК, MCU, PLC, промышленные компьютеры и Raspberry Pi.
- Режим крутящего момента
- Режим скорости
- Режим многократного поворота
- Режим однооборотного позиционирования + направления
- Режим инкрементного позиционирования
- Режим многократного поворота (с ограничением скорости)
- Режим однооборотного позиционирования + направления (с ограничением скорости)
- Режим инкрементного позиционирования (с ограничением скорости)
Руководства / Файлы
Детали

Разработан для управления движением с низкой скоростью и высокой точностью с компактной формой с полым валом.

Основная конструкция сосредоточена на плавном вращении и точном управлении током для стабильной производительности позиционирования.
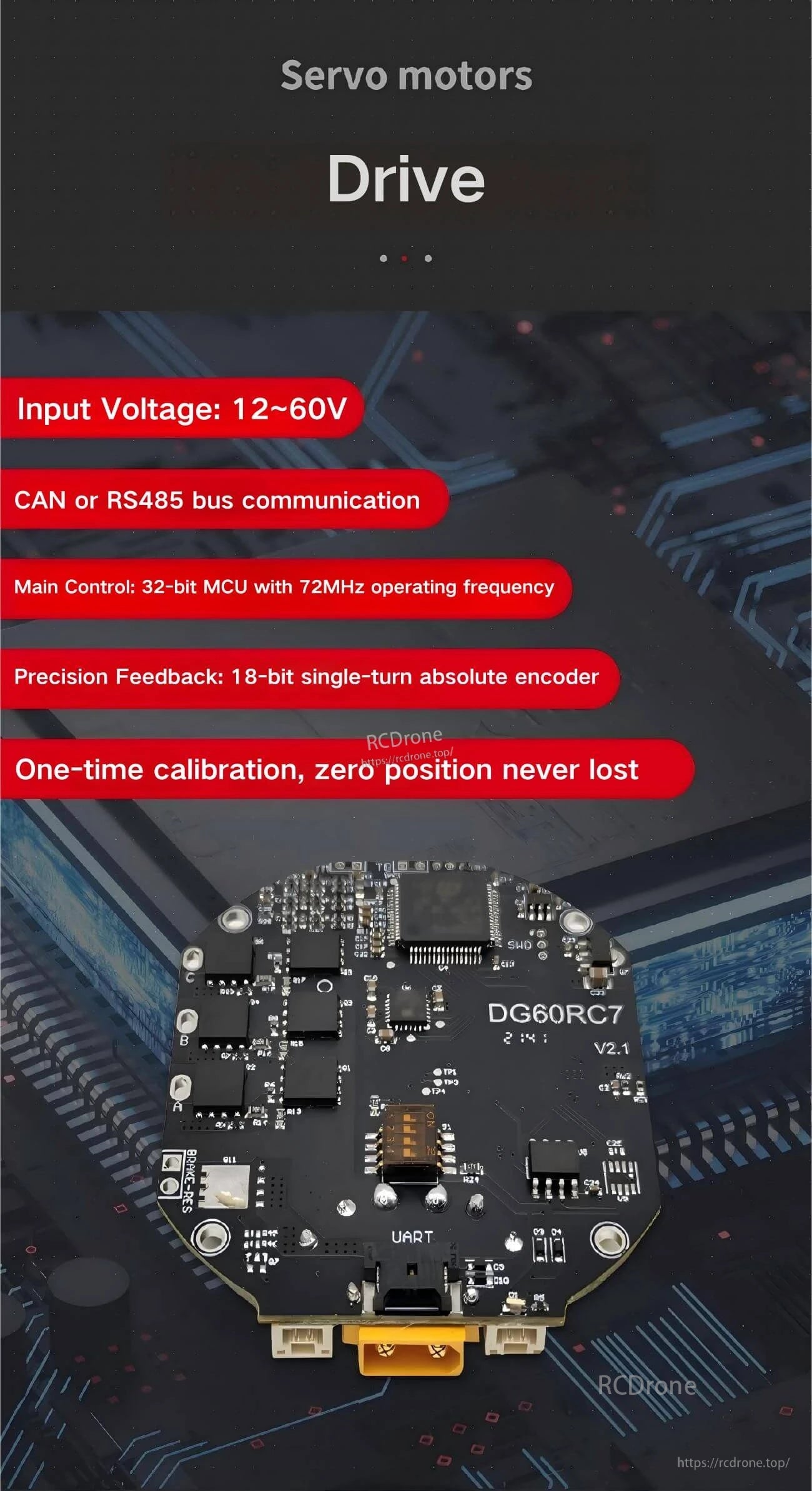
Встроенная электроника привода поддерживает управление по шине CAN или RS485 с обратной связью от абсолютного энкодера с разрешением 18 бит.

Четкая маркировка интерфейса помогает правильно подключать питание, UART и соединения CAN/RS485.
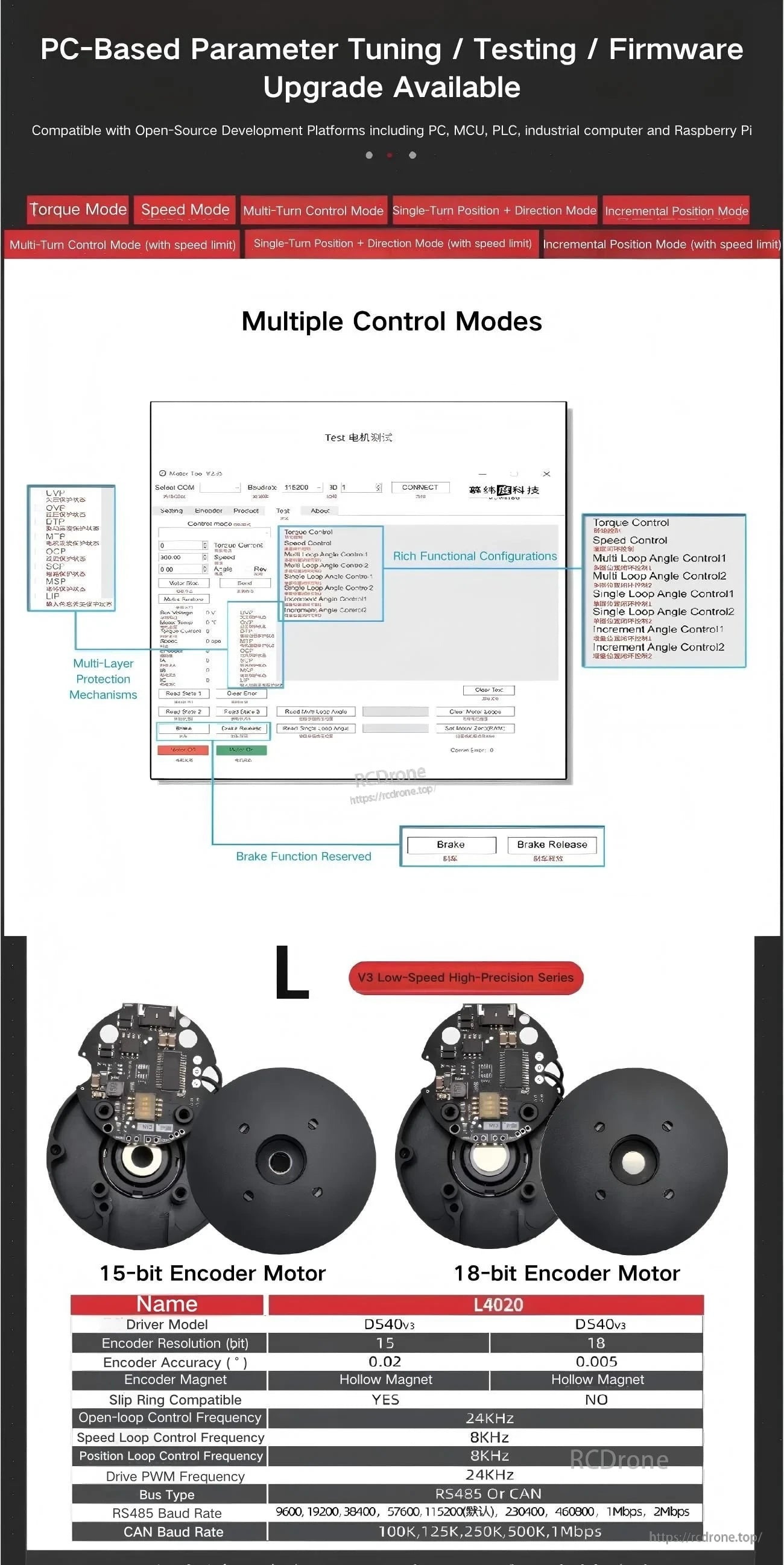
Программное обеспечение для ПК позволяет настраивать параметры, проводить тестирование и обновления прошивки для режимов управления моментом, скоростью и положением.
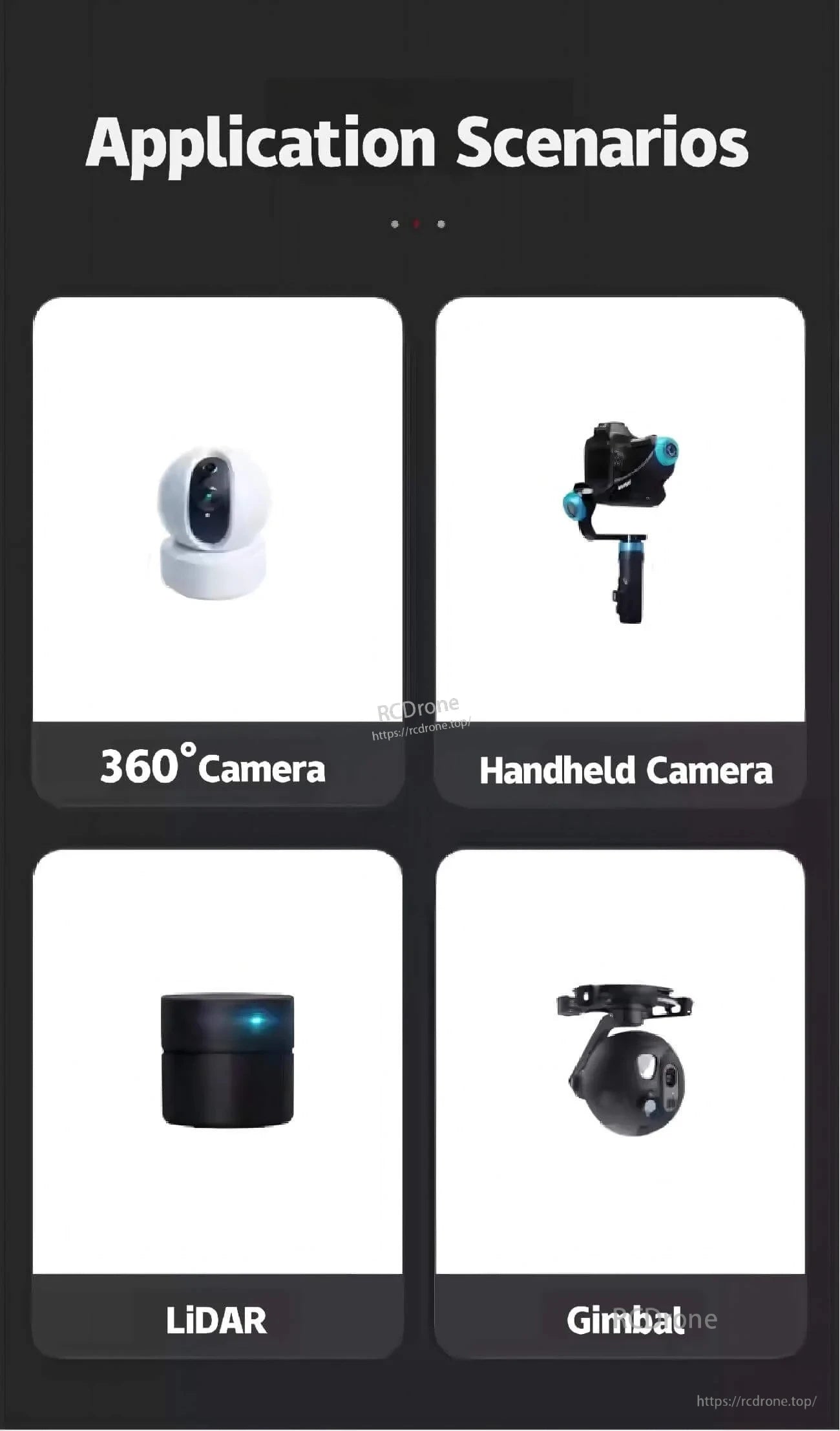
Практичное решение для компактных мехатронных сборок, таких как карданные подвесы, 360° камеры и модули LiDAR.
Related Collections

