







MyActuator RH-17 Полый гармонический мотор-редуктор – 54 Н·м пик. момент, передаточное число 100:1, EtherCAT и CAN BUS, двойной ABS-энкодер 17 бит
MyActuator RH-17 Полый гармонический мотор-редуктор – 54 Н·м пик. момент, передаточное число 100:1, EtherCAT и CAN BUS, двойной ABS-энкодер 17 бит
MyActuator
Не удалось загрузить сведения о доступности самовывоза
Обзор
Мотор-актуатор MyActuator RH-17 Hollow Harmonic Robot Joint Motor — это высокопроизводительный актуатор, разработанный для передовых робототехнических приложений. С передаточным отношением 100:1, пиковым крутящим моментом 54 Н·м и номинальным крутящим моментом 35 Н·м, он обеспечивает точную, стабильную и мощную работу. Оснащенный EtherCAT и CAN BUS коммуникацией, системой двойного энкодера ABS-17BIT и перекрестными роликовыми подшипниками, этот мотор обеспечивает исключительную точность управления и долговечность. Его компактный полый дизайн (Ø80 мм × 90,2 мм) и вес 1,11 кг делают его идеальным для манипуляторов, коллаборативных роботов и автоматизированных систем, требующих высокой плотности крутящего момента и точного управления движением.
Ключевые особенности
-
Высокий крутящий момент и мощность: Номинальный крутящий момент 35 Н·м и пиковый крутящий момент 54 Н·м для требовательных приложений.
-
Двунаправленная связь: Поддерживает протоколы EtherCAT и CAN BUS для бесшовной интеграции и быстрого отклика.
-
Точное управление: Два кодировщика ABS-17BIT для ввода и вывода обеспечивают точное позиционирование с <0.01° повторяемостью.
-
Компактный и легкий: Конструкция с полым валом весит всего 1.11 кг, оптимизирована для высокой плотности крутящего момента.
-
Надежная конструкция: Оснащен перекрестными роликовыми подшипниками для увеличенной грузоподъемности и долговечности.
-
Промышленная надежность: Класс изоляции F, высокоскоростной MCU и оптимизированное теплоотведение для стабильной работы в долгосрочной перспективе.
Параметры продукта
| Параметр | Значение |
|---|---|
| Передаточное отношение | 100:1 |
| Входное напряжение | 48 В |
| Скорость без нагрузки | 30 об/мин |
| Ток без нагрузки | 0.6 А |
| Номинальная скорость | 25 об/мин |
| Номинальный крутящий момент | 35 Н·м |
| Номинальная мощность | 91 Вт |
| Номинальный ток | 4.7 А (среднеквадратичное значение) |
| Пиковый крутящий момент | 54 Н·м |
| Пиковый ток | 7.4 A (rms) |
| Константа обратной ЭДС | 19.2 Вdc/Krpm |
| Константа крутящего момента модуля | 7.4 Н·м/А |
| Сопротивление фазы мотора | 0.70 Ω |
| Индуктивность фазы мотора | 0.47 мГн |
| Пары полюсов | 10 |
| Зазор | <40 угловых секунд |
| Радиальная нагрузка | Статическая: 16.3 кН / Динамическая: 10.4 кН |
| Осевая нагрузка | Статическая: 78.2 кН / Динамическая: 20.8 кН |
| Инерция | N: 0.52 кг·м² / B: 0.56 кг·м² |
| Точность повторного позиционирования | <0.01° |
| Связь | CAN BUS & EtherCAT |
| Вес | Нетто: 1.11 кг / Упаковано: 1.28 кг |
| Класс изоляции | F |
Тип энкодера
-
Входной энкодер: ABS-17BIT
-
Выходной энкодер: ABS-17BIT
-
Обеспечивает точную обратную связь о движении для повышения точности управления.
Установка & Размеры
-
Размер: Ø80 мм × 90.2 мм
-
Монтаж: Множество сквозных отверстий и резьбовых интерфейсов для надежной установки.
-
Пустотелый вал: Оптимизирован для прокладки кабелей в роботизированных руках и автоматизированных системах.
Интерфейс и проводка
-
Порты EtherCAT: Входные и выходные терминалы для цепочки сети.
-
Порты CAN BUS: CAN_H и CAN_L для связи.
-
Электрические терминалы: Разъемы XT30 для надежной подачи питания.
-
Вспомогательные соединения: Интерфейсы для батареи памяти и резистора разряда для сложных систем управления.
Содержимое упаковки
-
Актюатор: MyActuator RH-17 Пустотный гармонический мотор ×1
-
A. Кабель питания ×2
-
B. Кабель для связи CAN BUS ×4
-
C. 120Ω терминальное сопротивление ×1
-
D. EtherCAT коммуникационный кабель ×2
-
E. CAN BUS коммуникационный модуль ×1 (Бесплатный USB-CAN адаптер включен в каждый заказ)
Применения
-
Совместные роботизированные руки
-
Системы промышленной автоматизации
-
Человекообразные и четвероногие роботы
-
Платформы для точного движения
-
Автономные роботизированные суставы для исследований и разработок
Детали

Роботизированный мотор RH-17 предлагает двойной энкодер, CAN BUS и EtherCAT, передаточное отношение 100:1, 48V, 35 N.m крутящий момент, 91W мощность. Доступен с/без тормоза. Включает чертежи и параметры.
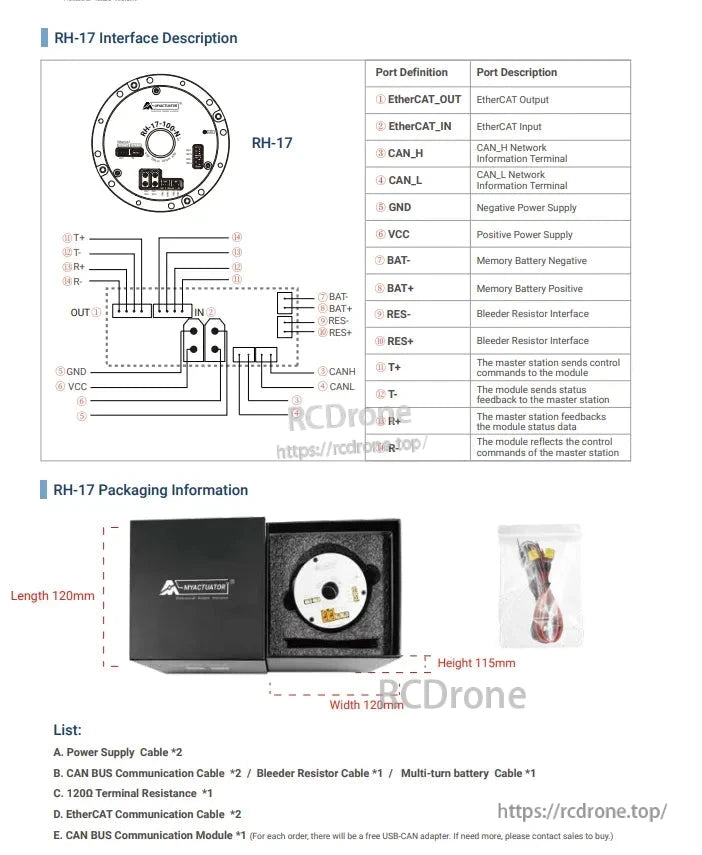
Интерфейс RH-17 включает в себя соединения EtherCAT, CAN-шины, питания и батареи. Упаковка содержит кабели, резисторы и модуль. Размеры: 120×120×115мм. В список входят кабели питания, CAN, EtherCAT, резисторы и коммуникационный модуль.
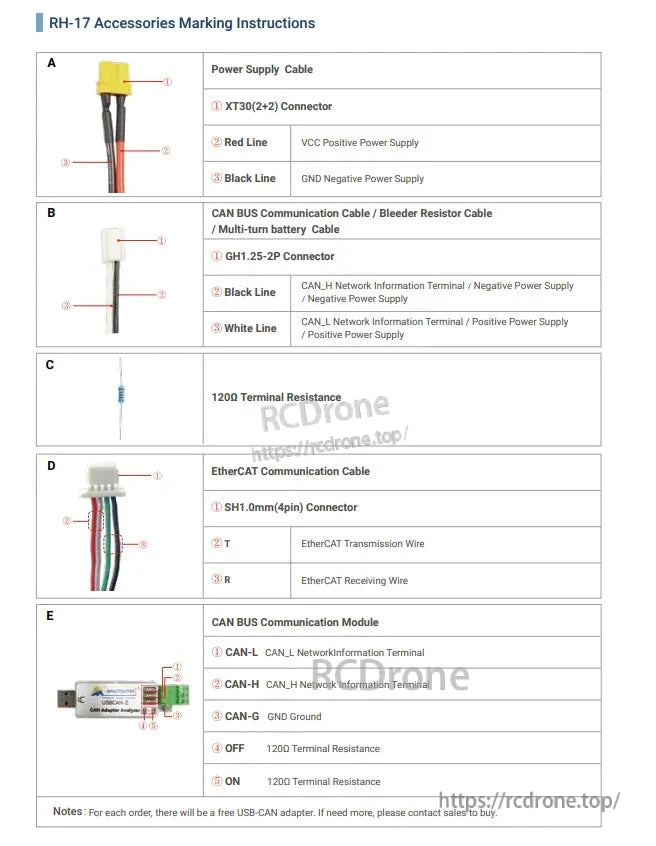
Аксессуары RH-17 включают в себя кабели питания, CAN BUS, EtherCAT, резистор 120Ω и коммуникационный модуль. Подробности охватывают разъемы, цвета проводов, функции и сопротивления терминалов для каждого компонента. Адаптер USB-CAN включен в заказ.
Related Collections







