





Гармонический роботизированный привод MyActuator RH-20, передаточное число 100:1, пиковый крутящий момент 80Н·м, EtherCAT и CAN-шина, двойной 17-битный энкодер
Гармонический роботизированный привод MyActuator RH-20, передаточное число 100:1, пиковый крутящий момент 80Н·м, EtherCAT и CAN-шина, двойной 17-битный энкодер
MyActuator
Не удалось загрузить сведения о доступности самовывоза
Обзор
Мотор-актуатор MyActuator RH-20 Harmonic представляет собой высокопроизводительный гармонический привод, разработанный для роботизированных суставов, промышленной автоматизации и систем точного движения. С коэффициентом передачи 100:1, пиковым крутящим моментом 80N·m, номинальным крутящим моментом 50N·m и номинальной мощностью 130W, этот актуатор обеспечивает мощную, стабильную и эффективную работу в компактном форм-факторе.
Оснащенный протоколами связи EtherCAT и CAN Bus и двойными абсолютными энкодерами с разрешением 17 бит, RH-20 обеспечивает исключительную точность повторного позиционирования (<0.01°), что делает его идеальным для гуманоидных роботов, совместимых роботизированных рук, мобильных роботов и других точных приложений.
Ключевые особенности
-
Высокая мощность – номинальный крутящий момент 50N·m, пиковый крутящий момент 80N·m и номинальная мощность 130W для тяжелых приложений.
-
Точное управление – Двойные ABS 17-битные энкодеры обеспечивают точность повторного позиционирования менее 0.01°.
-
Современная связь – Поддержка EtherCAT и CAN Bus для быстрого и надежного управления в реальном времени.
-
Надежная защита – Изоляция класса F обеспечивает безопасную и стабильную работу при непрерывном использовании с высокой нагрузкой.
-
Компактный дизайн – Диаметр 90 мм, высота 97.4 мм и вес всего 1.75 кг для бесшовной интеграции в многосистемные системы.
-
Прочные подшипники – Перекрестные роликовые подшипники для высокой радиальной и осевой нагрузки и длительного срока службы.
Технические характеристики
Производительность мотора
| Параметр | Единица | Значение |
|---|---|---|
| Передаточное отношение | – | 100 |
| Входное напряжение | В | 48 |
| Скорость без нагрузки | Об/мин | 30 |
| Ток без нагрузки | А | 1.2 |
| Номинальная скорость | Об/мин | 25 |
| Номинальный крутящий момент | Н·м | 50 |
| Номинальная мощность | Вт | 130 |
| Номинальный ток | А (ср) | 6.8 |
| Пиковый крутящий момент | Н·м | 80 |
| Пиковый ток | А (ср) | 10.6 |
| Постоянная обратной ЭДС двигателя | Vdc/Krpm | 19.2 |
| Постоянная крутящего момента модуля | N·m/A | 7.3 |
| Сопротивление фазы двигателя | Ω | 0.36 |
| Индуктивность фазы двигателя | mH | 0.51 |
| Пары полюсов | – | 10 |
| 3-фазное соединение | – | Y |
| Зазор | Арксекунд | <40 |
Нагрузка & Инерция
| Параметр | Единица | Значение |
|---|---|---|
| Радиальная нагрузка (статическая/динамическая) | KN | 22 / 14.6 |
| Осевая нагрузка (статическая/динамическая) | KN | 132.7 / 34 |
| Инерция (N/B) | кг·м² | 0.87 / 0.95 |
| Вес (N/B) | кг | 1.45 / 1.75 |
| Тип энкодера | – | Двойной ABS-17BIT (вход) / ABS-17BIT (выход) |
| Точность повторения позиции | Градус | <0.01 |
| Связь | – | EtherCAT & CAN Bus |
| Класс изоляции | – | F |
Данные о моменте заедания
| Момент (N·м) | Температура (°C) | Время заедания (с) | Фазный ток (A rms) |
|---|---|---|---|
| 75 | 12 | 15 | 10.5 |
| 100 | 8 | 10 | 13.5 |
| 125 | 15 | 8 | 18 |
Интерфейс и распиновка
-
EtherCAT_IN / EtherCAT_OUT – Порты высокоскоростной связи
-
CAN_H / CAN_L – Терминалы сети CAN Bus
-
VCC / GND – Положительное и отрицательное питание
-
RES+ / RES- – Интерфейс резистора разряда
-
BAT+ / BAT- – Подключение батареи многократного запоминания
-
T+, T-, R+, R- – Связь мастер-слейв и обратная связь по статусу
Содержимое упаковки
-
Кабель питания ×2
-
Кабель связи CAN Bus ×4
Сопротивление слива кабеля ×1
-
Многооборотный аккумуляторный кабель ×1
-
120Ω терминальное сопротивление ×1
-
EtherCAT коммуникационный кабель ×2
-
Модуль CAN-шины для связи ×1 (USB-CAN адаптер)
Применения
-
Суставы гуманоидных роботов
-
Сотрудничающие роботизированные руки
-
Мобильные роботы и системы привода AGV
-
Платформы для прецизионного позиционирования
-
Автоматизированное оборудование для инспекции и лабораторий
Детали
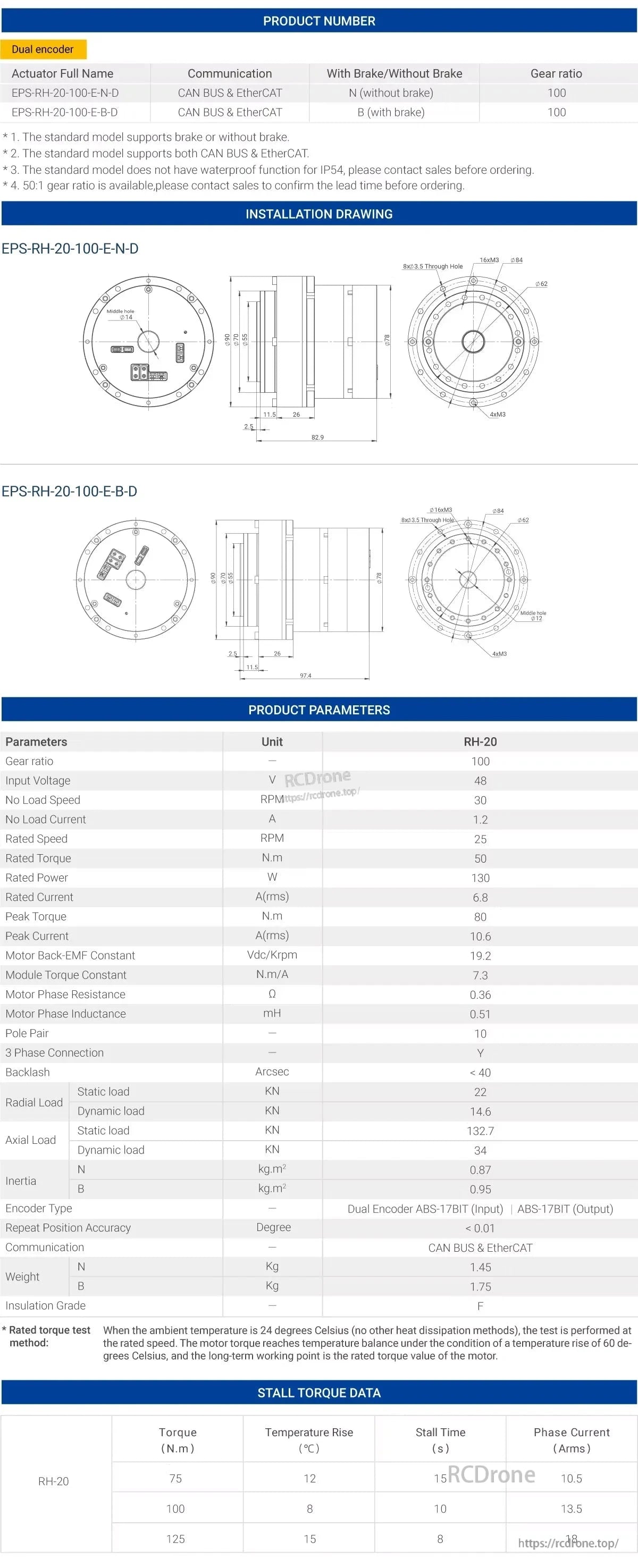
Мой актуатор RH-20 гармонический мотор имеет двойной энкодер, CAN BUS и EtherCAT, передаточное отношение 100:1, 50 N.m крутящий момент, 130 Вт мощность. Доступно с/без тормоза, IP54, включает чертежи и параметры.
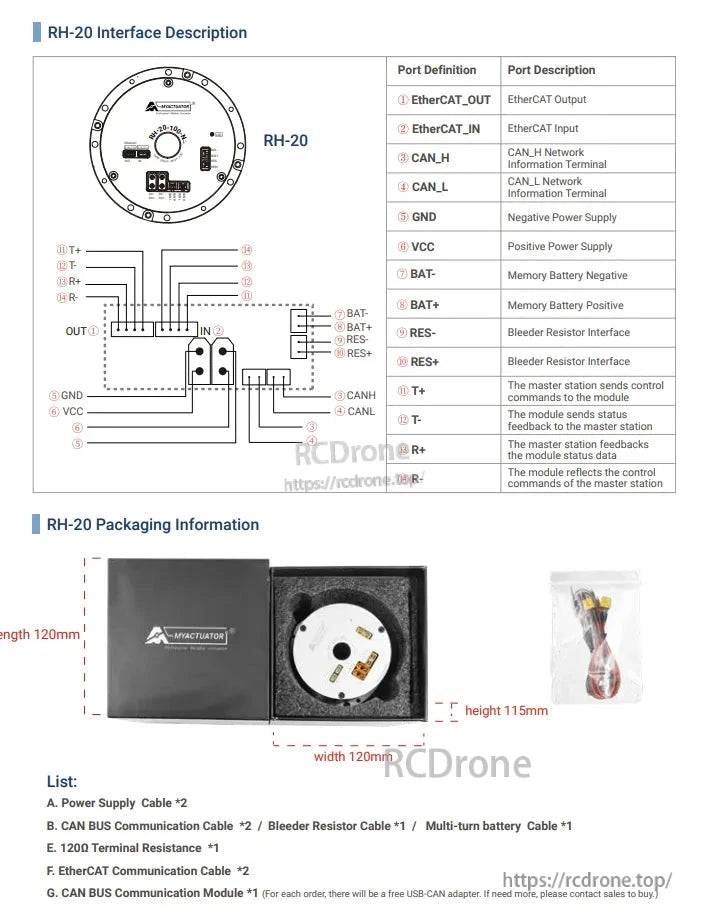
Интерфейс гармонического мотора имеет EtherCAT, CAN-шину, подключения питания и батареи. Упаковка: 120x120x115мм. Включает кабели, резисторы, модули связи для настройки.
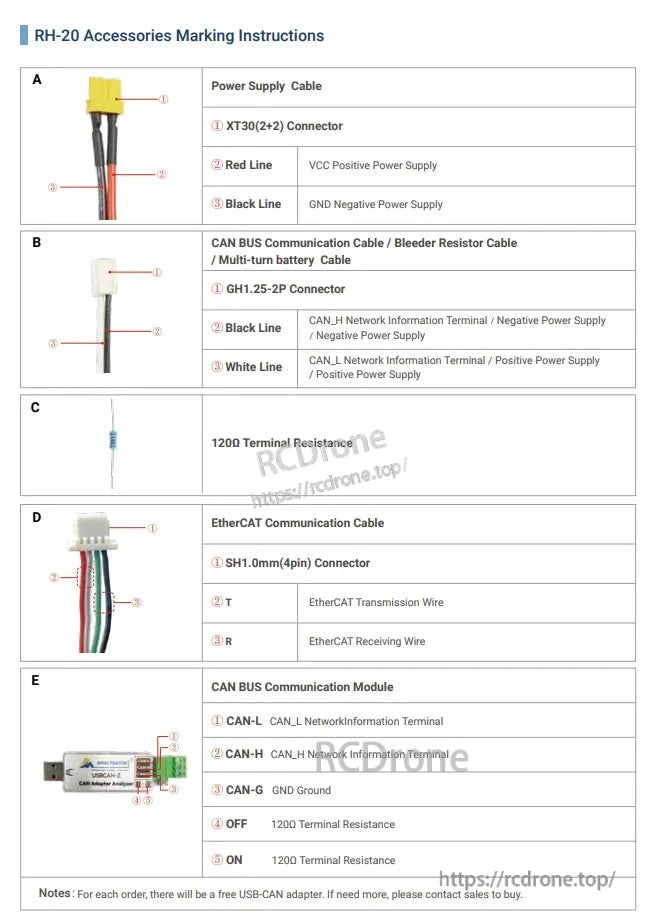
Аксессуары RH-20 включают инструкции по маркировке для питания, кабелей CAN BUS, EtherCAT и модуля связи. Подробности охватывают типы разъемов, цвета проводов, функции и сопротивление терминалов. Каждый заказ включает бесплатный адаптер USB-CAN.
Related Collections





