






Модуль полого гармонического роботизированного сочленения MyActuator RH-32, 48В, пиковый момент 229Нм, двойные 17-битные энкодеры, CAN BUS & управление EtherCAT
Модуль полого гармонического роботизированного сочленения MyActuator RH-32, 48В, пиковый момент 229Нм, двойные 17-битные энкодеры, CAN BUS & управление EtherCAT
MyActuator
Не удалось загрузить сведения о доступности самовывоза
Обзор
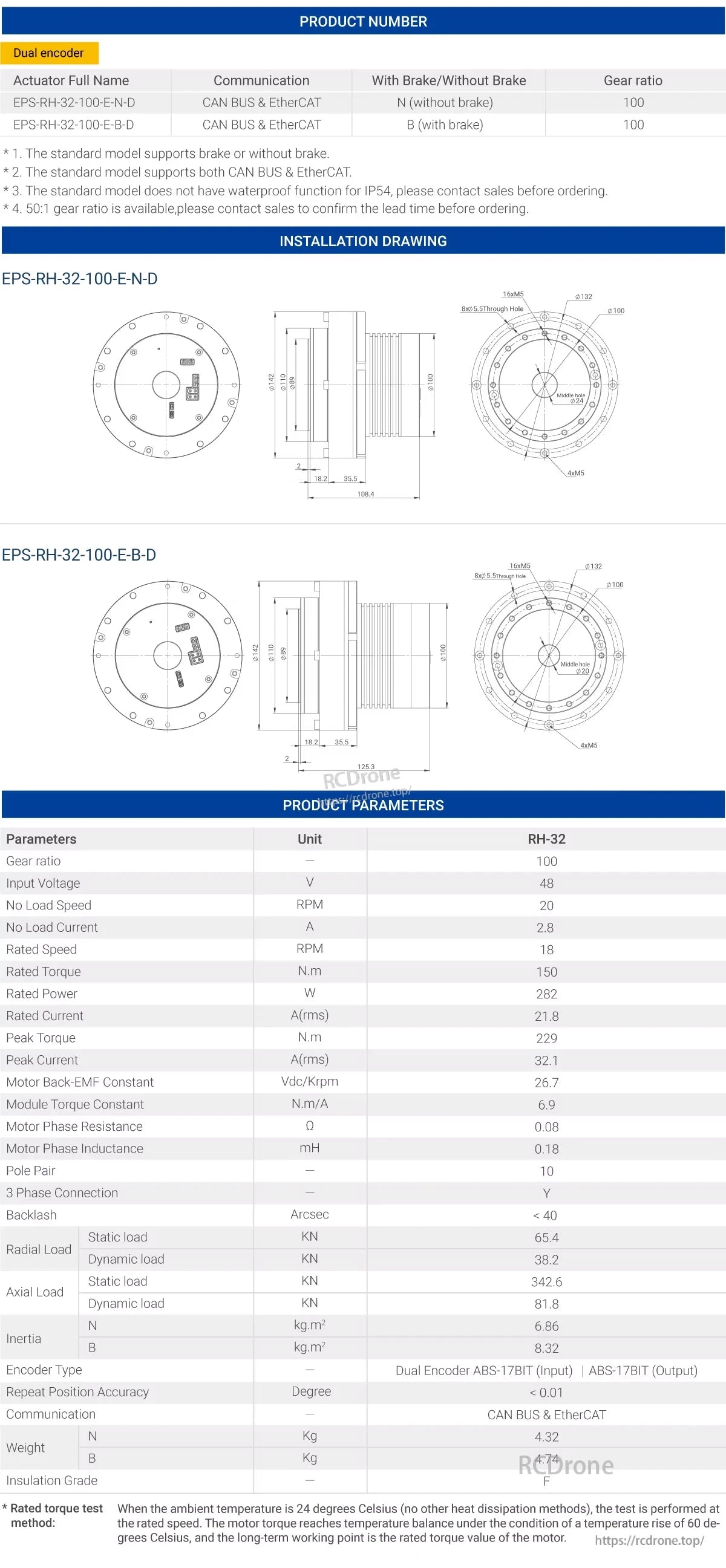
Модуль MyActuator RH-32 Hollow Harmonic Robot Joint - это высокомоментный, высокоточный актуатор, разработанный для роботизированных рук, гуманоидных роботов и систем совместной автоматизации. С соотношением передач 100:1, входным напряжением 48 В и пиковым моментом 229 Н·м, RH-32 обеспечивает исключительную производительность для приложений, требующих плавного движения, точного управления и высокой грузоподъемности. С поддержкой двойных энкодеров (17-битный ввод/вывод), CAN BUS &и EtherCAT связи, а также конструкцией с полым валом, он бесшовно интегрируется в современные роботизированные системы.
Ключевые особенности
-
Высокая производительность крутящего момента – Обеспечивает до 150 Н·м номинального момента и 229 Н·м пикового момента, идеально подходит для тяжелонагруженных роботизированных суставов.
-
Точное управление – Два 17-битных энкодера обеспечивают точную обратную связь и повторяемость <0.01°.
-
Универсальная связь – Поддерживает CAN BUS и EtherCAT для надежной и гибкой интеграции систем.
-
Высокая грузоподъемность – Обрабатывает до 342.6 kN осевой статической нагрузки и 81.6 kN осевой динамической нагрузки.
-
Компактный полый дизайн – Облегчает прокладку кабелей через соединение для более чистой и безопасной установки робота.
-
Высокая надежность – Оценка F класс изоляции и продвинутая система рассеивания тепла для промышленной долговечности.
Технические характеристики
| Параметр | Единица измерения | Значение |
|---|---|---|
| Передаточное отношение | — | 100 |
| Напряжение на входе | В | 48 |
| Скорость без нагрузки | Об/мин | 20 |
| Ток без нагрузки | А | 2.8 |
| Номинальная скорость | Об/мин | 18 |
| Номинальный крутящий момент | Н·м | 150 |
| Номинальная мощность | Вт | 282 |
| Номинальный ток | А(ср) | 21.8 |
| Пиковый крутящий момент | Н·м | 229 |
| Пиковый ток | A(rms) | 32.1 |
| Константа обратного ЭДС двигателя | Вdc/Коб | 26.7 |
| Константа крутящего момента модуля | Н·м/А | 6.9 |
| Сопротивление фазы двигателя | Ω | 0.08 |
| Индуктивность фазы двигателя | мГн | 0.18 |
| Пара полюсов | — | 10 |
| 3-фазное соединение | — | Y |
| Зазор | Арксек | < 40 |
| Радиальная нагрузка (статическая/динамическая) | кН | 65.4 / 38.2 |
| Осевая нагрузка (статическая/динамическая) | кН | 342.6 / 81.6 |
| Инерция (N/B) | кг·м² | 6.86 / 8.32 |
| Тип энкодера | — | Двойной энкодер ABS-17BIT (Вход/Выход) |
| Точность повторения позиции | Градус | < 0.01 |
| Связь | — | CAN BUS &и EtherCAT |
| Вес (N/B) | Кг | 4.32 / 4.74 |
| Класс изоляции | — | F |
Описание интерфейса
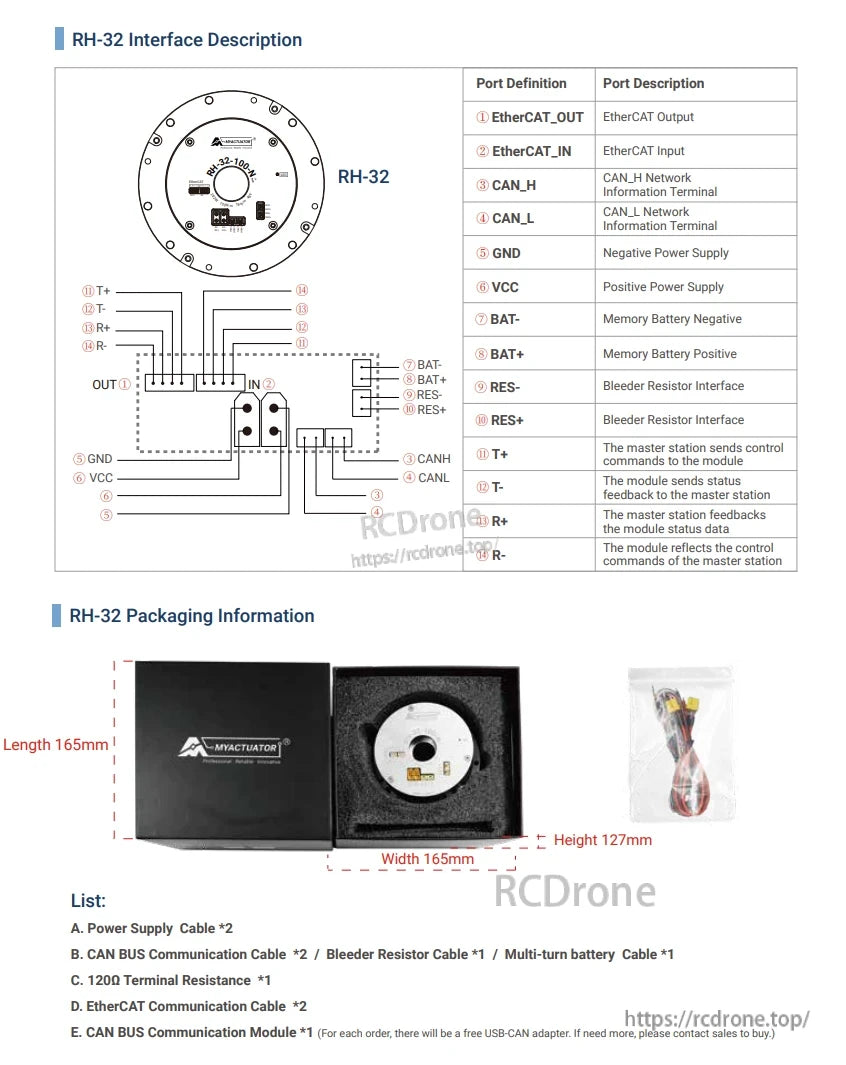
RH-32 поддерживает EtherCAT и CAN связь, обеспечивая надежное управление в реальном времени.
-
EtherCAT: Высокоскоростная детерминированная связь для промышленной автоматизации.
-
CAN BUS: Гибкая и стабильная связь для сложных многосоставных систем.
-
Специальные разъемы для питания, обратной связи и управляющих сигналов обеспечивают надежную и эффективную интеграцию.
Информация о упаковке
-
Размеры коробки: 165мм × 165мм × 127мм
-
Включенные аксессуары:
-
Кабель питания × 2
-
Кабель CAN BUS × 2
-
Кабель с резистором разряда × 1
-
Кабель многооборотной батареи × 1
-
Сопротивление терминала 120Ω × 1
-
Кабель EtherCAT × 2
-
Модуль CAN BUS × 1 (с бесплатным адаптером USB-CAN)
- MyActuator Модуль роботизированного сустава RH-32-100 × 1
-
Применения
-
Сотрудничающие роботы (коботы)
-
Человекообразные и сервисные роботы
Промышленные манипуляторы
-
Автоматизированные управляемые транспортные средства (AGVs)
-
Системы прецизионного позиционирования
Детали
Роботизированный сустав RH-32 предлагает двойной энкодер, CAN BUS/EtherCAT, передаточное отношение 100:1, 48V, 150 N.m крутящего момента, 21.8 Текущий. Дополнительный тормоз, IP54 доступен.
Роботизированный сустав RH-32 оснащен интерфейсами EtherCAT и CAN, определениями портов, размерами 165x165x127мм. Включает кабели, терминальный резистор, CAN-модуль.
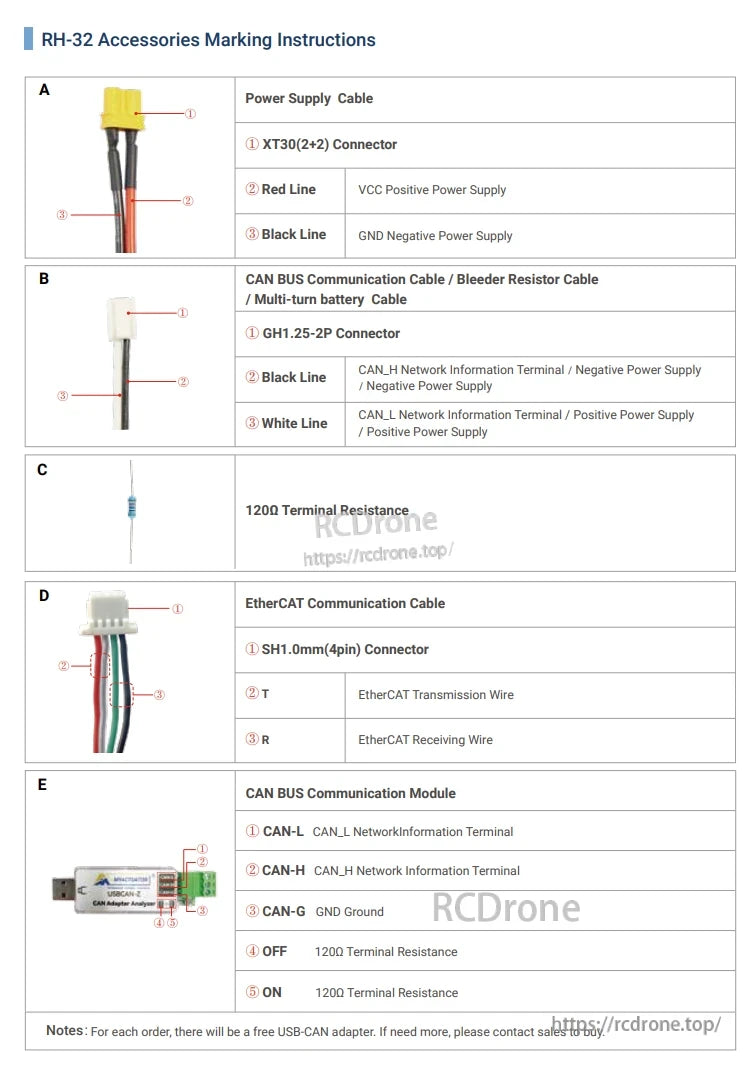
Аксессуары RH-32 включают кабели питания, CAN BUS, EtherCAT, резистор 120Ω и CAN-модуль. Подробности охватывают разъемы, функции проводов и терминальные сопротивления для правильной установки и связи. Бесплатный адаптер USB-CAN включен в каждый заказ.
Related Collections






