






Привод MyActuator RMD-X4-10 Планетарный актуатор 10Н·м, двойной энкодер, EtherCAT+CAN, для суставов робота
Привод MyActuator RMD-X4-10 Планетарный актуатор 10Н·м, двойной энкодер, EtherCAT+CAN, для суставов робота
MyActuator
Не удалось загрузить сведения о доступности самовывоза
Обзор
Планетарный актуатор MyActuator RMD-X4-10 представляет собой высокопроизводительный модуль с DC-двигателем, разработанный для передовых робототехнических приложений. Он оснащен планетарным редуктором с передаточным отношением 12.6:1, пиковым крутящим моментом 10N·m и номинальной выходной мощностью 100W, а также интегрирует двойную систему энкодеров (17-битный вход / 18-битный выход), обеспечивающую точность управления 0.01°. Его большая полая структура поддерживает интеграцию нескольких датчиков, создавая центральный узел для управления позой всего тела в гуманоидных роботах. С двухпротокольной коммуникацией EtherCAT и CAN актуатор достигает ультрабыстрого отклика 250μs, что делает его идеальным для высокодинамичных и высоконадежных сценариев, таких как гуманоидные роботы, бионические приводные механизмы и промышленная автоматизация.
Ключевые особенности
-
Высокоточный двойной энкодер: 17-битный вход / 18-битный выход с 0.01° точность
-
Пиковый крутящий момент 10N·m с планетарным передаточным отношением 12.6:1
-
Перекрестный роликовый подшипник: Исключительная способность противодействия изгибу для стабильных роботизированных суставов
-
EtherCAT + CAN Bus Двойная связь: Поддерживает многомашинную связь, ультрабыстрый отклик 250μs
-
Большая полая структура: Обеспечивает интеграцию датчиков, кабелей и скользящих колец для сложных роботизированных систем
-
Высокая надежность: Разработан для управления походкой человека, плавные переходы для бега, прыжков и сложных движений
-
Компактный и легкий: Φ55mm × 55.5mm, вес 0.33кг
Характеристики
| Параметр | Значение |
|---|---|
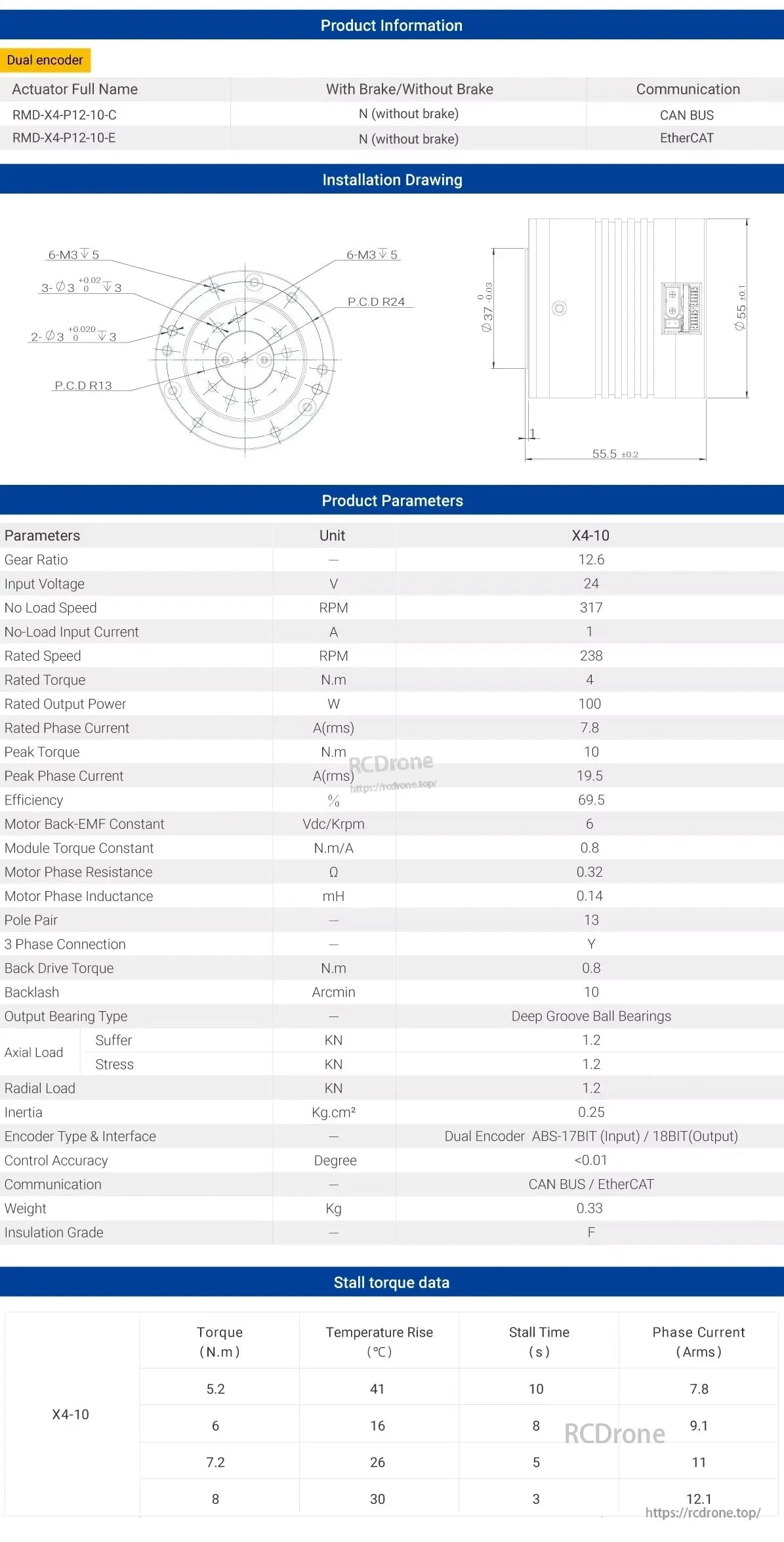
| Модель | RMD-X4-10 |
| Передаточное отношение | 12.6:1 |
| Входное напряжение | 24В DC |
| Номинальная скорость | 238 об/мин |
| Скорость без нагрузки | 317 об/мин |
| Номинальная выходная мощность | 100Вт |
| Номинальный крутящий момент | 4Н·м |
| Пиковый крутящий момент | 10Н·м |
| Номинальный ток | 7.84A |
| Ток без нагрузки | 1A |
| Тип энкодера | Двойной энкодер (ABS-17bit / 18bit) |
| Связь | EtherCAT + CAN Bus |
| Вес | 0.33кг |
| Размер | Ø55мм × 55.5мм |
Применения
-
Человекообразные роботы – Силовые приводы для рук, ног и торса
-
Бионические приводные механизмы – Высокий крутящий момент с противоизгибной конструкцией для бега и прыжков
-
Сотрудничающие роботы – Плавное управление движением для промышленной автоматизации
-
Экзоскелеты – Легкие, высокодинамичные приводы для вспомогательных устройств для человека
-
Гибкие производственные линии – Мультиосевая синхронизация через высокоскоростную связь EtherCAT
Упаковка и аксессуары
-
Блок питания + CAN-шина коммуникационный кабель ×1
-
120Ω терминальное сопротивление ×1
Кабель связи EtherCAT ×2
-
Модуль связи CAN Bus ×1 (адаптер USB-CAN включен в заказ)
Габариты упаковки: 100мм × 100мм × 70мм
Детали

RMD-X4-PT2.5-10-C двойной энкодер для привода суставов робота с входом 24В, передаточным отношением 12.6, крутящим моментом 4Н·м и выходной мощностью 100Вт. Особенности: интерфейс CAN BUS/EtherCAT, скорость без нагрузки 317 об/мин и вес 0.28кг. Включает размеры установки и технические характеристики.

Планетарный актуатор с пиковым крутящим моментом 10Н·м, передаточным отношением 12.6:1, весом 0.33кг. Размер: Ø55мм×55.5мм. Особенности: связь EtherCAT/CANBUS, двойной энкодер, высокоскоростной MCU, CAN-чипы и шарикоподшипники глубокого профиля.

Двойной энкодер ABS-17BIT Вход / 18BIT Выход, X4-10, SN:40225621, MYACTUATOR

Планетарный актуатор RMD-X4-10 от MYACTUATOR предлагает мощность 100Вт, крутящий момент 46Нм, двойной энкодер, скорость 238об/мин. Поставляется с кабелем питания + CAN BUS, резистором 120Ω, кабелем EtherCAT, модулем CAN BUS и бесплатным адаптером USB-CAN.
Планетарный актуатор RMD-X4-10 Роботизированный планетарный актуатор имеет двойной энкодер, 12.6 передаточное отношение, вход 24В, выход 100Вт и CAN BUS/EtherCAT. Он обеспечивает крутящий момент 4Н·м, скорость 238 об/мин, весит 0,33 кг и использует шарикоподшипники глубокого профиля для высокой эффективности.

Интерфейс X4-10 включает порты питания, CAN и EtherCAT. Упаковка содержит блок питания, кабели, резисторы и модуль. Размеры: 100x100x70мм. Включает адаптер USB-CAN с каждым заказом.

Аксессуары X4-10 включают блок питания, кабели CAN BUS и EtherCAT, терминальный резистор и модуль CAN BUS. Подробности охватывают разъемы, функции проводов, сигнальные линии и примечания по адаптеру USB-CAN.
Related Collections






