





MyActuator RMD-X4-36 34Н·м планетарный привод, бесщеточный DC мотор с двойным энкодером, EtherCAT и CAN-шина, передаточное число 36:1
MyActuator RMD-X4-36 34Н·м планетарный привод, бесщеточный DC мотор с двойным энкодером, EtherCAT и CAN-шина, передаточное число 36:1
MyActuator
Не удалось загрузить сведения о доступности самовывоза
Обзор
Актюатор MyActuator RMD-X4-36 Планетарный Актюатор DC Бесщеточный Мотор - это высокопроизводительный суставной актюатор, разработанный для робототехники и автоматизированных систем, требующих точного управления движением, высокого крутящего момента и компактной интеграции. С пиковым крутящим моментом 34N·m, передаточным отношением 36:1 и структурой с перекрестными роликовыми подшипниками, он обеспечивает отличную устойчивость к изгибу и долговечность. С двойными протоколами связи EtherCAT + CAN и ультрабыстрой реакцией 250μs, этот актюатор идеально подходит для гуманоидных роботов, роботизированных рук, мобильных платформ и других передовых роботизированных приложений. Его двойной дизайн энкодера (вход ABS 17 бит / выход 18 бит) обеспечивает ультра-высокую точность позиционирования, в то время как компактный размер (55мм × 61мм, 0.36кг) позволяет легкую и эффективную интеграцию.
Ключевые особенности
-
Высокоточный двойной энкодер: 17 бит (вход) + 18 бит (выход) для точности 0.01°.
-
Протоколы EtherCAT + CAN Bus: Гибкая связь с ультрабыстрым откликом 250 мкс.
-
Перекрестные роликовые подшипники: Превосходные характеристики против изгиба и длительный срок службы.
-
Высокая плотность мощности: Компактный диаметр 55 мм, длина 61 мм и вес всего 0.36 кг.
-
Пиковый крутящий момент 34 Н·м и Номинальный крутящий момент 11.5 Н·м обеспечивают стабильный и мощный выход движения.
-
Высокая эффективность: Номинальная мощность 100 Вт с плавной технологией FOC (управление с ориентацией поля).
-
Универсальное применение: Разработан для гуманоидных роботов, экзоскелетов, манипуляторов и автоматизированных систем.
Характеристики
| Параметр | Значение |
|---|---|
| Модель | RMD-X4-P36-36-C |
| Входное напряжение | 24V |
| Передаточное отношение | 36:1 |
| Скорость без нагрузки | 111 об/мин |
| Ток без нагрузки | 0.9 A |
| Номинальная скорость | 83 об/мин |
| Номинальный крутящий момент | 11.5 Н·м |
| Номинальная выходная мощность | 100 W |
| Пиковый крутящий момент | 34 Н·м |
| Пиковый фазный ток | 21.5 A (rms) |
| Пары полюсов | 13 |
| Тип энкодера | Двойной энкодер ABS 17-бит (вход) / 18-бит (выход) |
| Протоколы связи | EtherCAT / CAN Bus |
| Размер | Ø55мм × 61мм |
| Вес | 0.36 кг |
Содержимое упаковки
-
1 × RMD-X4-36 Планетарный привод мотор
-
1 × Блок питания + CAN-шина коммуникационный кабель
-
1 × 120Ω Конечное сопротивление
-
2 × EtherCAT коммуникационные кабели
-
1 × CAN-шина коммуникационный модуль (USB-CAN адаптер)
Применения
-
Человекообразные и бионические роботы
-
Сотрудничающие роботизированные руки
-
Экзоскелеты и реабилитационные роботы
-
Сервисные роботы и мобильные платформы
-
Системы прецизионной автоматизации, требующие компактных, высокомоментных приводов
Детали

Планетарный актуатор с 34N.m пиковым крутящим моментом, передаточное отношение 36:1, 0.36 кг вес, Ø55мм×61мм размер. Особенности: связь EtherCAT/CANBUS, двойной энкодер, высокоскоростной MCU, CAN-чипы и перекрестные роликовые подшипники.

Двигатель RMD-X4-P36-36: 24В, 10.5Н·м крутящего момента, 83 об/мин, двойной энкодер, EtherCAT+CAN BUS, передаточное отношение 36, 0.36 кг, энкодер ABS-17BIT/18BIT, подробные размеры включены.

Двигатель X4-36, 100Вт, 12Н·м, двойной энкодер, 17BIT вход, 18BIT выход, 63 об/мин, передаточное отношение 1:36, интерфейс CAN bus, светодиодный индикатор.

Двигатель MYACTUATOR X4-36, 100Вт, 12Н·м, двойной энкодер, 83 об/мин, отношение 1:36. Включает блок питания, кабель CAN BUS, резистор 120Ω, кабели EtherCAT и модуль CAN BUS с бесплатным адаптером USB-CAN.
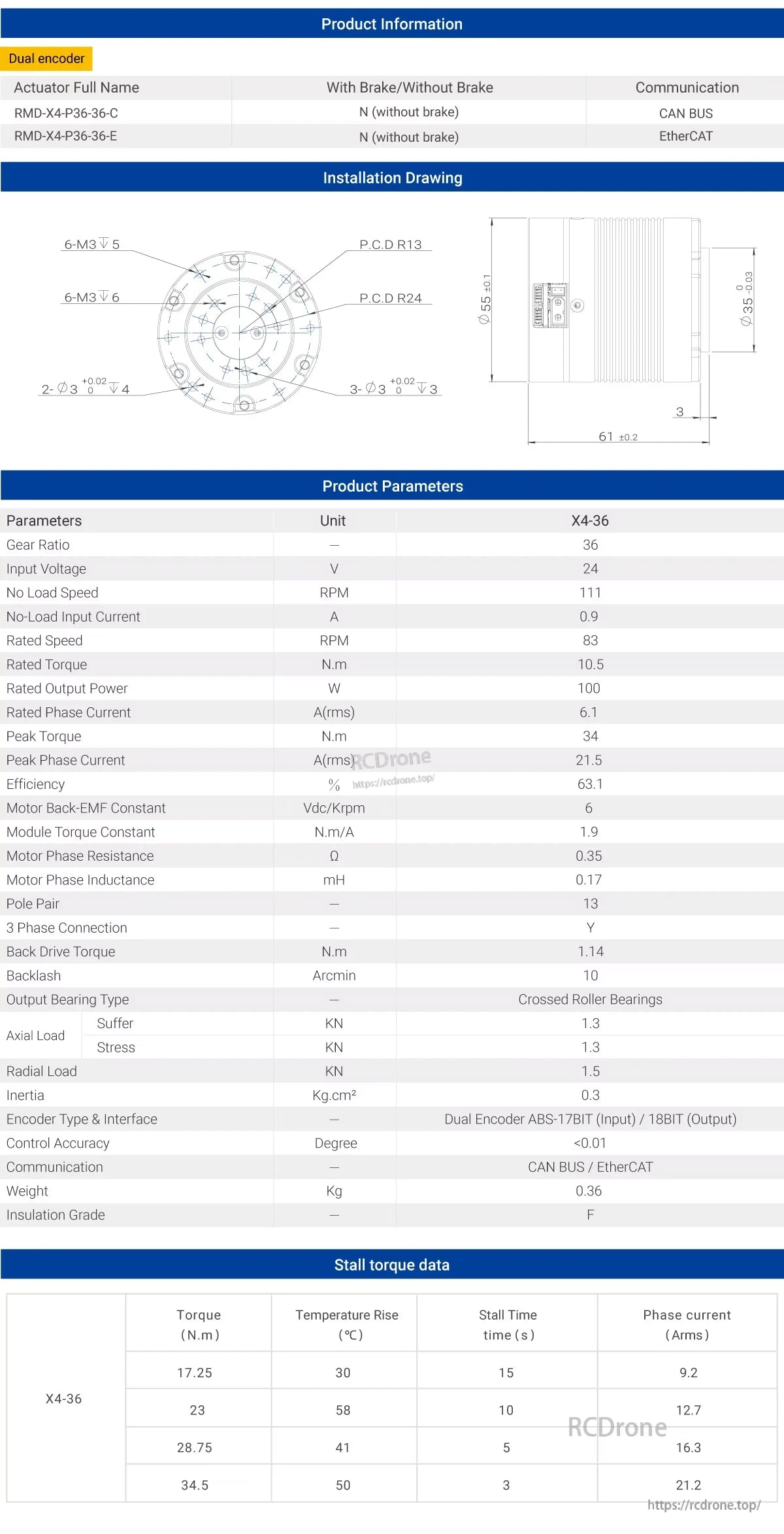
Двигатель RMD-X4-P36-36 имеет двойной энкодер, передаточное отношение 36, вход 24В, выход 100Вт, CAN BUS/EtherCAT. Номинальный крутящий момент: 10.5 Н·м, скорость: 83 об/мин, вес: 0.36 кг. Данные о крутящем моменте при заедании включают крутящий момент, повышение температуры, время и значения фазного тока.

Детали интерфейса включают порты питания, CAN и EtherCAT. Упаковка содержит мотор, кабели, резисторы, модули связи. Размеры: 100x100x70мм. Включает адаптер USB-CAN.
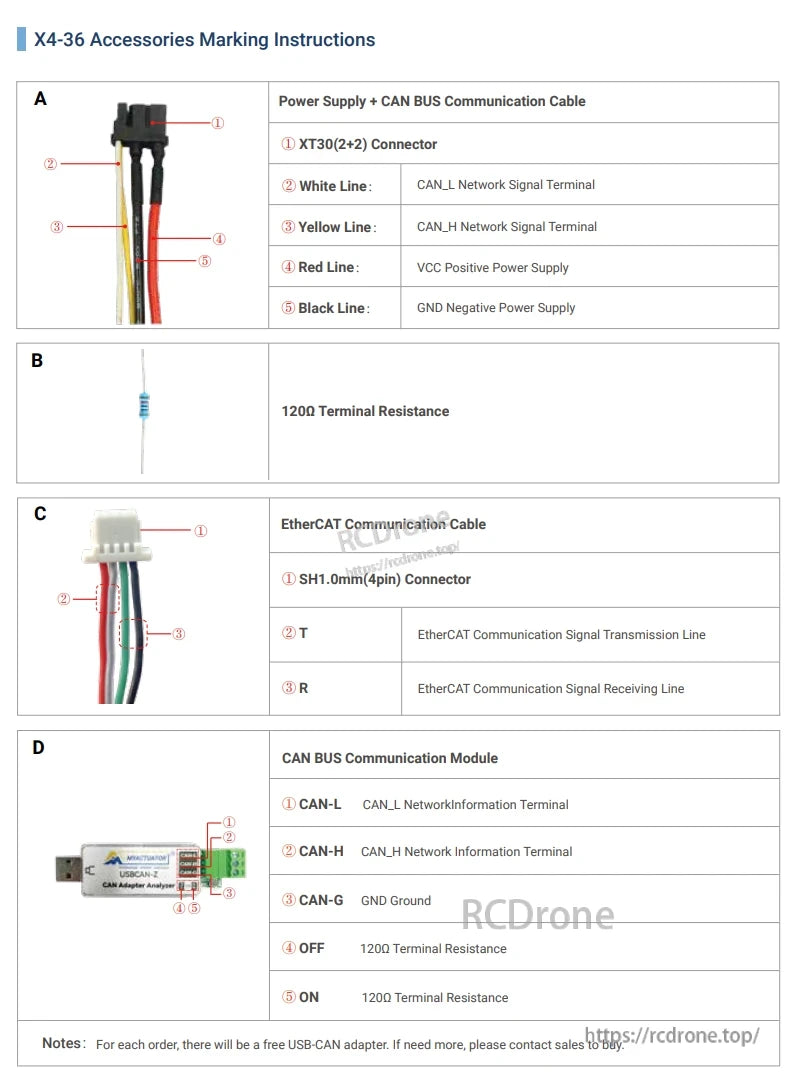
Аксессуары X4-36 включают блок питания, кабели CAN BUS, EtherCAT, сопротивление 120Ω и модуль CAN. Подробности охватывают разъемы, цвета проводов, сигнальные линии и настройки терминалов для соединений связи и питания. Адаптер USB-CAN включен в каждый заказ.
Related Collections





