





Сервопривод MyActuator RMD-X6-60 с двумя энкодерами 320Вт 20Н·м 60Н·м пик 48В EtherCAT CAN BUS Высокоточный мотор для роботизированных сочленений
Сервопривод MyActuator RMD-X6-60 с двумя энкодерами 320Вт 20Н·м 60Н·м пик 48В EtherCAT CAN BUS Высокоточный мотор для роботизированных сочленений
MyActuator
Не удалось загрузить сведения о доступности самовывоза
Обзор
Интеллектуальный сервопривод MyActuator RMD-X6-60 представляет собой компактный, высокопроизводительный интегрированный привод, разработанный для робототехники, автоматизации и приложений точного управления движением. Оснащенный интерфейсами связи EtherCAT и CAN BUS и двойной системой энкодеров, этот привод предлагает высокую плотность крутящего момента, точное управление и многорежимное управление движением. Он идеально подходит для суставов роботов, манипуляторов, мобильных роботов и систем промышленной автоматизации, которые требуют высокой точности и надежности.
Ключевые параметры:
-
Номинальная мощность: 320W
-
Номинальный крутящий момент: 20N·m
-
Пиковый крутящий момент: 60N·m
-
Номинальная скорость: 153RPM
-
Передаточное отношение: 19.612:1
-
Точность двойного энкодера: 17 бит на входе / 17 бит на выходе
-
Протоколы связи: CAN BUS, EtherCAT
-
Входное напряжение: 48В
Ключевые особенности
-
Дизайн двойного энкодера
Интегрированные 17-битные энкодеры на входе и выходе обеспечивают точную обратную связь для точного управления движением и мониторинга состояния. -
Поддержка нескольких протоколов
Встроенные EtherCAT и CAN BUS интерфейсы обеспечивают широкую совместимость с различными платформами управления роботами и автоматизацией. -
Высокая плотность мощности и крутящий момент
Способен обеспечивать 320 Вт непрерывной мощности и 60 Н·м пикового крутящего момента, удовлетворяя требованиям динамических и тяжелонагруженных приложений. -
Гибридные режимы управления
Поддерживает гибридное управление положением, скоростью и моментом, что позволяет создавать сложные многосистемные и координированные движения. -
Высокоточная обратная связь и быстрая реакция
Интегрированные высокоскоростные МК и CAN-процессоры обеспечивают реакцию на уровне миллисекунд для точного управления. -
Компактный и легкий дизайн
Размеры 120мм × 120мм × 80мм и вес 0.82кг делают его идеальным для легких роботизированных приложений, где пространство и вес имеют критическое значение.
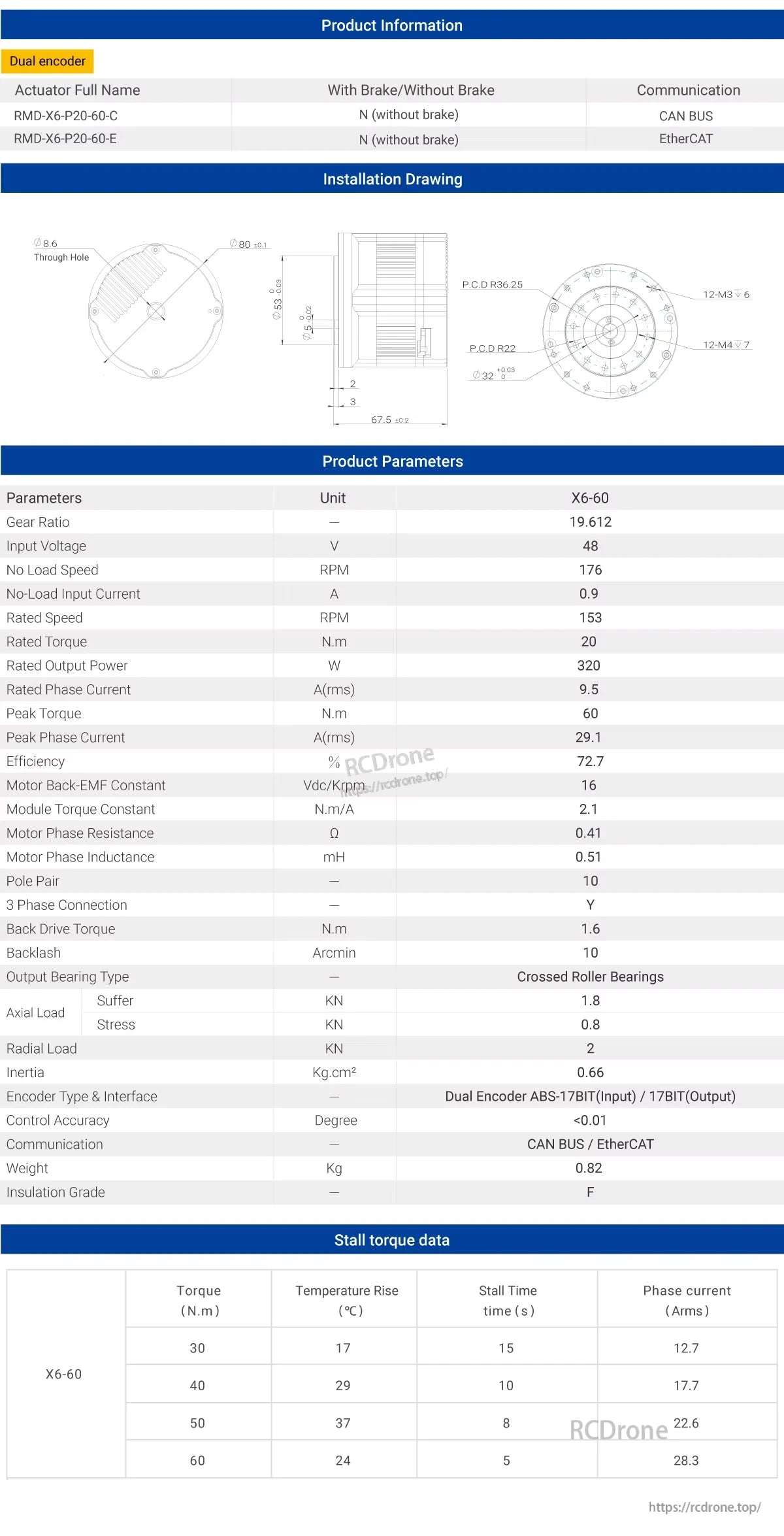
Технические характеристики
| Параметр | Значение |
|---|---|
| Модель | RMD-X6-P20-60-C |
| Входное напряжение | 48В |
| Номинальная мощность | 320Вт |
| Номинальный крутящий момент | 20Н·м |
| Пиковый крутящий момент | 60Н·м |
| Номинальная скорость | 153об/мин |
| Скорость без нагрузки | 176об/мин |
| Номинальный ток | 9.5А (RMS) |
| Ток без нагрузки | 0.9А |
| Пиковый ток | 29.1A (RMS) |
| Передаточное отношение | 19.612:1 |
| Пары полюсов | 10 |
| Разрешение энкодера | Вход: 17 бит / Выход: 17 бит |
| Вес | 0.82кг |
Описание интерфейса
Порты питания и связи
| Порт | Описание |
|---|---|
| EtherCAT_OUT | Порт выхода EtherCAT |
| EtherCAT_IN | Порт ввода EtherCAT |
| CAN_L | Терминал сигнала CAN Low |
| CAN_H | Терминал сигнала CAN High |
| GND | Отрицательное питание |
| VCC | Положительное питание |
Терминалы сигналов
R+/R-: Данные обратной связи от модуля к главной станции
-
T+/T-: Сигналы управляющих команд от главной станции к модулю
Размеры и структура
-
Диаметр: 120мм
-
Высота: 80мм
-
Монтажные отверстия: P.C.D R26.25 и R22 с 12 × M4 резьбовыми отверстиями
-
Выходной вал: Стандартный фланцевый интерфейс для гибкой муфты с внешними компонентами
Информация о упаковке
| Включенные элементы | Количество |
|---|---|
| Блок питания + CAN BUS коммуникационный кабель | 2 шт |
| EtherCAT коммуникационный кабель | 2 шт |
| 120Ω терминальное сопротивление | 1 шт |
| Модуль CAN BUS связи (USB-CAN адаптер) | 1 шт |
Размеры упаковки:
-
Длина × Ширина × Высота: 120мм × 120мм × 80мм
Аксессуары и соединения
Блок питания + CAN BUS кабель
-
Разъем: XT30 (2+2)
-
Белая линия: сигнал CAN_L
-
Желтая линия: сигнал CAN_H
-
Красная линия: положительное питание VCC
-
Черная линия: отрицательное питание GND
Кабель связи EtherCAT
-
Разъем: SH1.0мм (4-pin)
-
Линия T: Передача сигнала связи EtherCAT
-
Линия R: Прием сигнала связи EtherCAT
Модуль CAN BUS
-
Клеммы: CAN_L, CAN_H, CAN_G и переключаемое 120Ω завершение (ВКЛ/ВЫКЛ)
-
Адаптер USB-CAN предоставляется бесплатно с каждым заказом
Применения
-
Совместные роботизированные суставы
-
Сервисные и гуманоидные роботы
-
Системы управления рулевым управлением или приводом мобильных роботов
-
Промышленные роботизированные руки
-
Системы высокоточного управления движением
Исследовательские и образовательные платформы
Резюме
Актюатор MyActuator RMD-X6-60 интегрирует высокоточные двойные энкодеры, протоколы связи EtherCAT и CAN BUS, высокую плотность крутящего момента и компактный форм-фактор, что делает его универсальным и надежным решением для робототехники и промышленной автоматизации.С его 320W мощностью, 60N·m пиковым крутящим моментом и 17-битной высокоразрешающей обратной связью, этот сервопривод обеспечивает исключительную производительность и точность управления для продвинутых проектов в области робототехники.
Детали
Сервопривод RMD-X6-60 имеет двойной энкодер, передаточное отношение 19.612, вход 48V, мощность 320W, связь CAN BUS/EtherCAT, 20 N.mноминальный крутящий момент, 60 N.mпиковый крутящий момент и весит 0.82 кг.
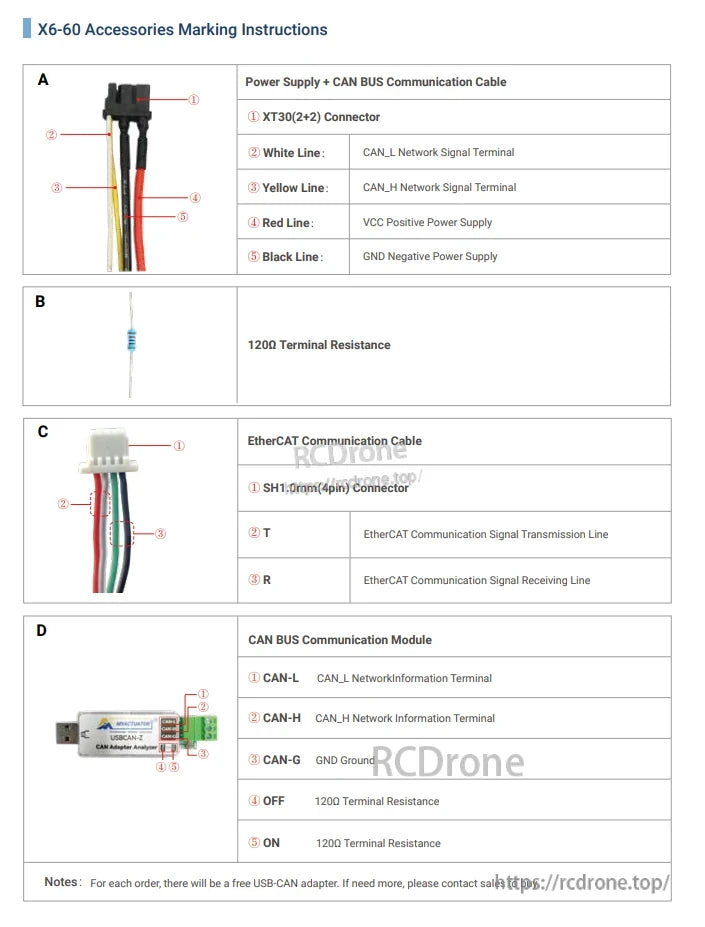
Аксессуары X6-60 включают в себя кабель питания и CAN BUS с цветными проводами, сопротивление на клеммах 120Ω, кабель EtherCAT с линиями T/R и модуль CAN BUS с клеммами для CAN-L, CAN-H, GND и настройками сопротивления на клеммах. В каждом заказе включен бесплатный адаптер USB-CAN.

Сервопривод RMD-X6-P20-60-C с EtherCAT+CAN BUS, 19.612 соотношение, 48В вход, номинальная скорость 153 об/мин, крутящий момент 20Нм, выходная мощность 320Вт, двойной энкодер, высокоскоростной МК и CAN чип, перекрестный роликовый подшипник.
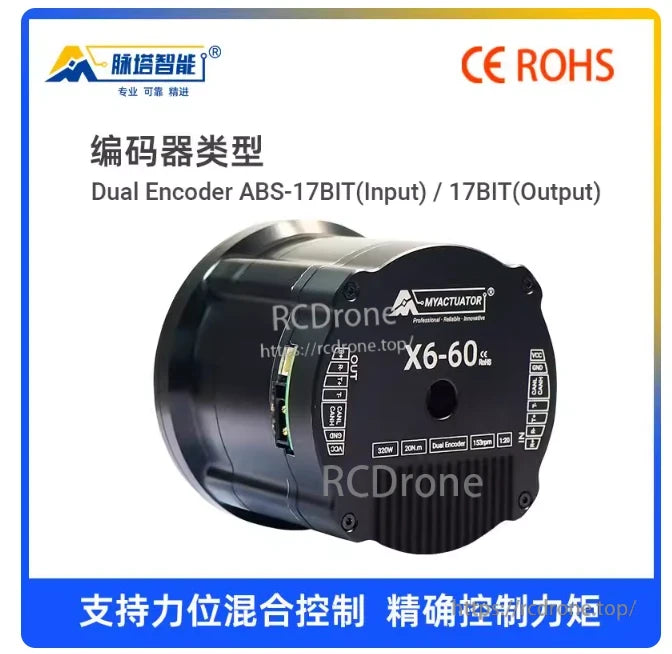
Двойной энкодер ABS-17BIT Вход/Выход, сервопривод X6-60, 300Вт, 20Н.м, 128об/мин, поддерживает гибридное управление силой и положением, точное управление крутящим моментом.
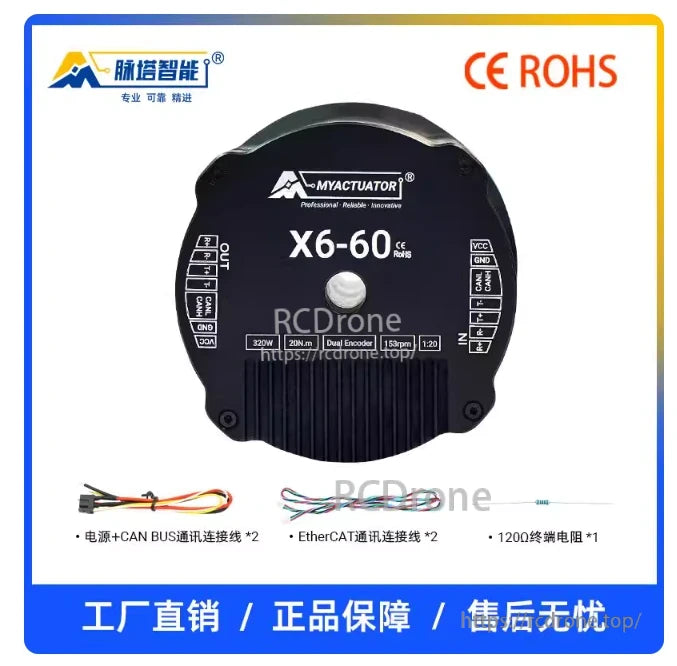
Сервопривод X6-60, 320Вт, 20Н.м, двойной энкодер, 158об/мин, соотношение 1:20, с кабелями CAN BUS и EtherCAT, 120Ω терминатор, сертифицирован CE ROHS.

Упаковка сервопривода RMD-X6-60 с проводкой CAN BUS, силовым кабелем и 1200 Ом резистором завершения.
Related Collections





