





OYMotion ROH-AP001 Ловкая роботизированная рука, 6 СОС, 11 суставов, датчики силы, UART/RS485/CAN, PID-контроль, 0,7 с
OYMotion ROH-AP001 Ловкая роботизированная рука, 6 СОС, 11 суставов, датчики силы, UART/RS485/CAN, PID-контроль, 0,7 с
OYMotion
Не удалось загрузить сведения о доступности самовывоза
Обзор
OYMotion ROH-AP001 Ловкая рука - это роботизированная рука с 11 подвижными суставами и 6 встроенными драйверами моторов, обеспечивающими 6 активных степеней свободы. Встроенный алгоритм управления двигателем PID обеспечивает точное и повторяемое захватывание и манипуляцию объектами. Каждый палец интегрирован с датчиком силы для мониторинга в реальном времени и замкнутого управления силой захвата. Физические интерфейсы включают UART, RS485 или CAN FD, с поддержкой протокола SerialCtrl, ModBus-RTU и CAN. Платформы ROS/ROS2 поддерживаются для вторичной разработки через SDK (требуется лицензионное соглашение).
Ключевые особенности
- 6 активных степеней свободы и 11 сочленений; независимо моторизованные пальцы для естественного захвата.
- Встроенные драйверы моторов и управление PID; все приводы интегрированы в руку.
- Датчики силы на каждом пальце с тактильной обратной связью и управлением силой в реальном времени.
- Поворот большого пальца с приводом и складной дизайн пальцев.
- Поддержка сенсорного управления на кончиках пальцев.
- Быстрое движение: 0,7 с для полного сгибания/растяжения и 0,7 с для полного поворота большого пальца.
- Грузоподъемность: до 30 кг пассивной нагрузки для четырех пальцев (согнутых), 10 кг на палец (согнутый), 8 кг на палец (растянутый).
- Размеры и пропорции, похожие на человеческие; мягкие подушечки пальцев и силиконовая перчатка; индивидуальный дизайн запястья; сигнализатор сообщений.
- Интерфейсы и протоколы: UART/RS485/CAN с SerialCtrl и ModBus-RTU; CAN на 1M бод.
- Используемые материалы: алюминиевый сплав, цинковый сплав, нержавеющая сталь, силикон, пластик.
Спецификации
| Активные степени свободы | 6 |
| Подвижные суставы (артикуляции) | 11 |
| Вертикальное расстояние от кончика среднего пальца до запястья | 183 мм |
| Вертикальное расстояние от кончика большого пальца до запястья | 95 мм |
| Длина большого пальца | 111 мм |
| Максимальная ширина ладони | 82 мм |
| Диаметр запястья | 49 мм |
| Максимальный угол открытия и закрытия со стороны большого пальца | 0~31 ° |
| Максимальный угол открытия и закрытия большого пальца к ладони | 0~50 ° |
| Угол бокового вращения большого пальца | 0~90 ° |
| Время сгибания/разгибания для полного диапазона при максимальной скорости | 0.7 секунд |
| Время вращения большого пальца для полного диапазона на максимальной скорости | 0.7 секунды |
| Активная сила каждого кончика пальца в растянутом состоянии | ≥0.5 Kgf |
| Активная сила каждого кончика пальца в согнутом состоянии | ≥1.0 Kgf |
| Максимальная активная сила кончика большого пальца | ≥1.0 Kgf |
| Максимальная пассивная нагрузка для четырех пальцев в согнутом состоянии | 30 Kg |
| Максимальная пассивная нагрузка для каждого пальца в согнутом состоянии | 10 Kg |
| Максимальная пассивная нагрузка для каждого пальца в вытянутом состоянии | 8 Kg |
| Функция касания пальцем экрана | Поддерживается |
| Обратная связь по силе нажатия пальца | Поддерживается |
| Температура рабочей среды | -10 °C ~ +40 °C |
| Влажность рабочей среды | Максимальная относительная влажность 85% |
| Срок службы дизайна | 3 года |
| Вес (включая запястье) | 640 g ± 5 g |
| Интерфейс связи | UART/RS485/CAN |
| Скорость передачи данных | UART: 9600/19200/38400/57600/115200/230400/460800/921600; RS485: 9600/19200/38400/57600/115200/230400/460800; CAN: 1M |
| Поддерживаемый протокол | UART: SerialCtrl, ModBus-RTU; RS485: SerialCtrl, ModBus-RTU; CAN: SerialCtrl |
| Материалы | Алюминиевый сплав; цинковый сплав; нержавеющая сталь; силикон; пластик |
Применения
- Роботизированные захваты и гуманоидные роботы.
- Учебное и исследовательское оборудование.
- Бионические протезы.
- Промышленная автоматизация и системы AGV.
Для получения помощи с заказом, рекомендаций по интеграции или технической поддержки, пожалуйста, свяжитесь с [email protected] or посетите https://rcdrone.top/.
Руководства
Детали

ROHand обеспечивает точность позиционирования ±1 мм благодаря встроенному PID-контролю мотора и предлагает шесть активных степеней свободы для имитации движений человеческой руки, таких как щипание и захват. Идеально подходит для гуманоидных роботов, роботизированных захватов, систем инспекции, интеллектуальных бионических протезов и учебных или исследовательских приложений, его дизайн поддерживает универсальную, точную манипуляцию в сложных задачах.
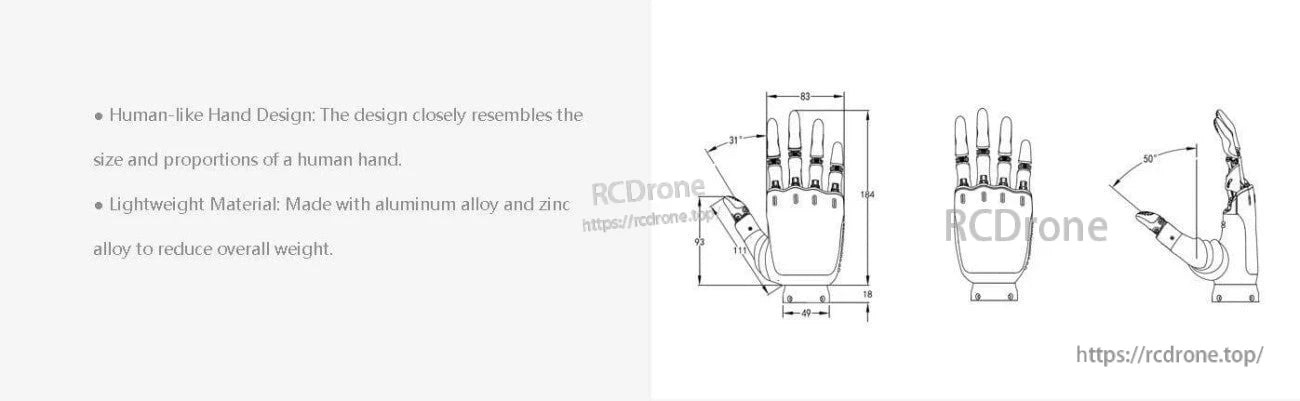
Человекообразная дексетерная роботизированная рука с легкой конструкцией из алюминиево-цинкового сплава и точными размерами.

OYMotion ROH-AP001 ловкая роботизированная рука имитирует человеческие пропорции, оснащена подвижными пальцами и датчиками для точного, полноразмерного роботизированного манипулирования.
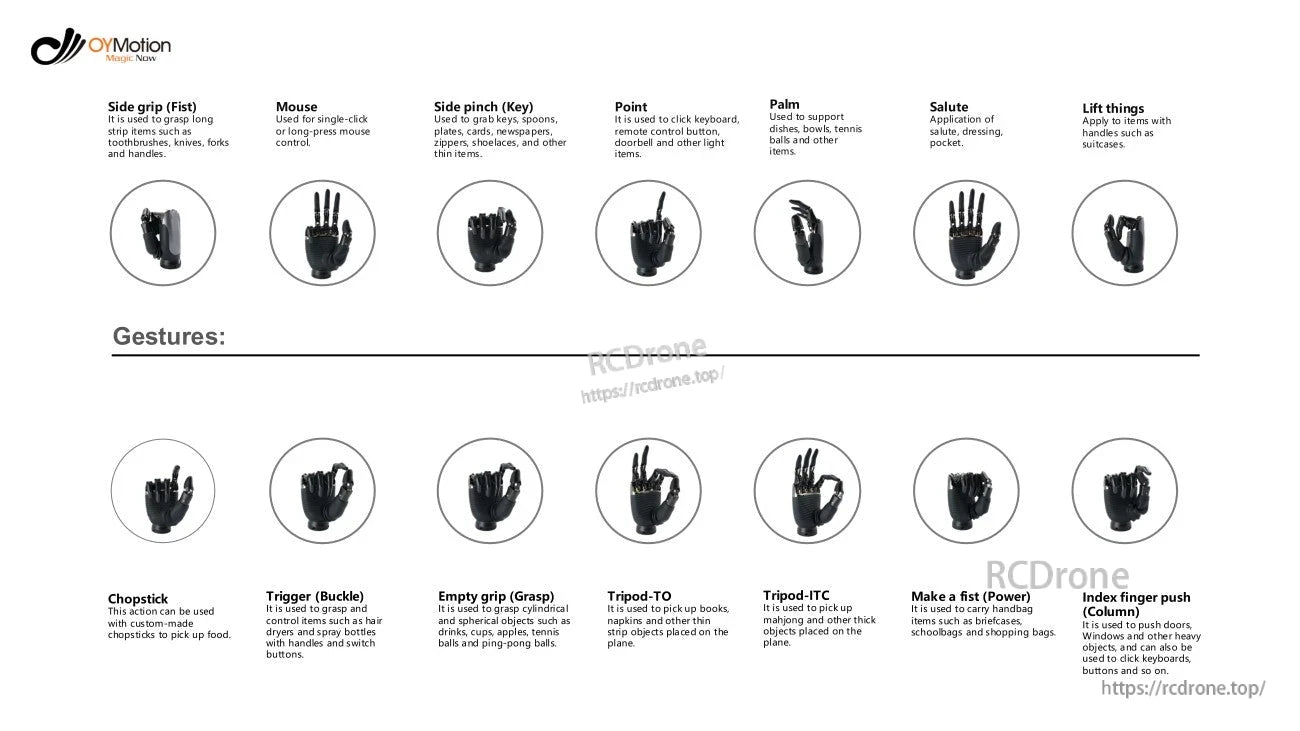
Роботизированная рука OYMotion выполняет 14 точных жестов — таких как захват, указание и подъем — для выполнения повседневных задач, таких как использование палочек для еды, перенос сумок или нажатие клавиш на клавиатуре, демонстрируя высокую ловкость и практическую полезность.

Роботизированная рука OYMotion предлагает моторизованные пальцы, складной дизайн, мягкие накладки, приводимый в действие большой палец, силиконовую перчатку, встроенное приведение, сигнализатор, индивидуальный запястье и разъем RS485 для ловкого естественного захвата.
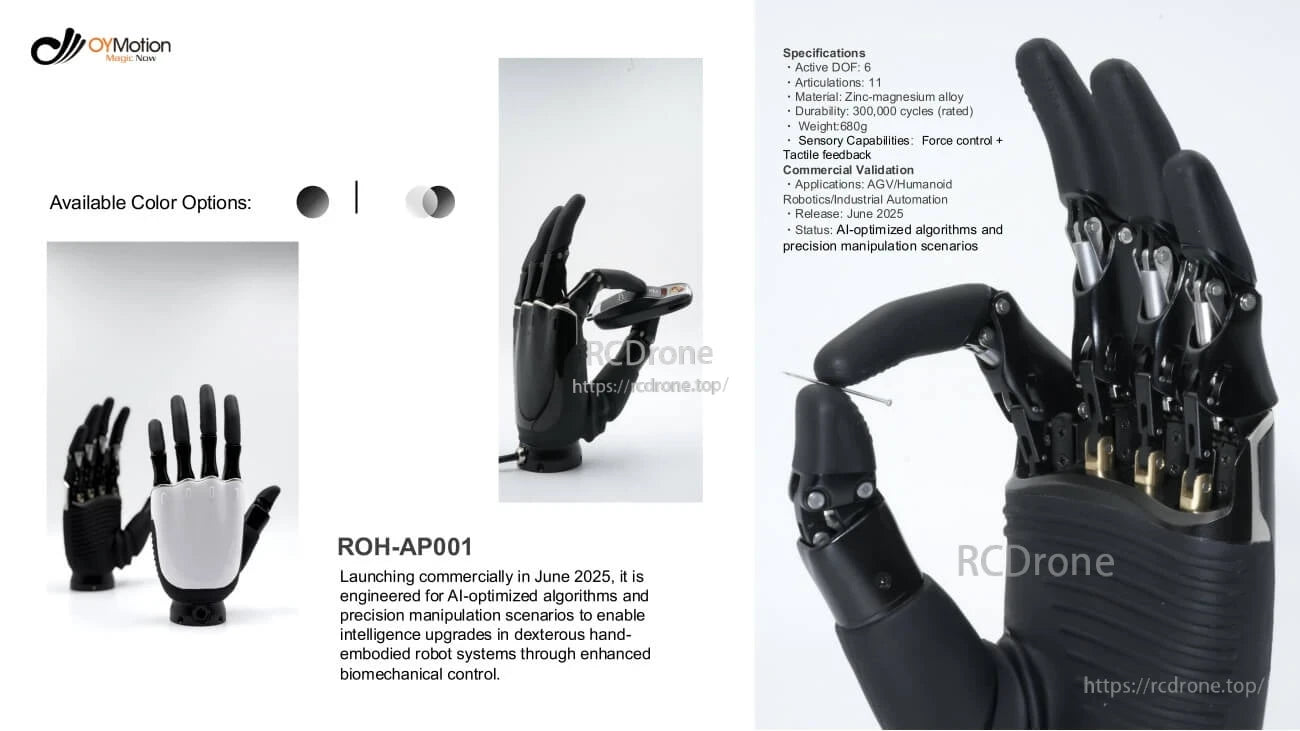
Ловкая роботизированная рука OYMotion ROH-AP001 имеет 6 активных степеней свободы, 11 сочленений, корпус из сплава цинка и магния, долговечность 300 тысяч циклов, весит 680 г и предлагает обратную связь по силе/тактильную обратную связь для ИИ и точных задач — запуск в июне 2025 года.

Роботизированная рука OYMotion ROH-AP001 имеет моторизованные пальцы, приводимый в действие большой палец, силиконовую перчатку и встроенное приведение. Изготовлена из алюминия, цинка, стали, силикона и пластика, включает в себя зуммер, индивидуальный запястье, протокол RS485, складной дизайн и пружины давления.
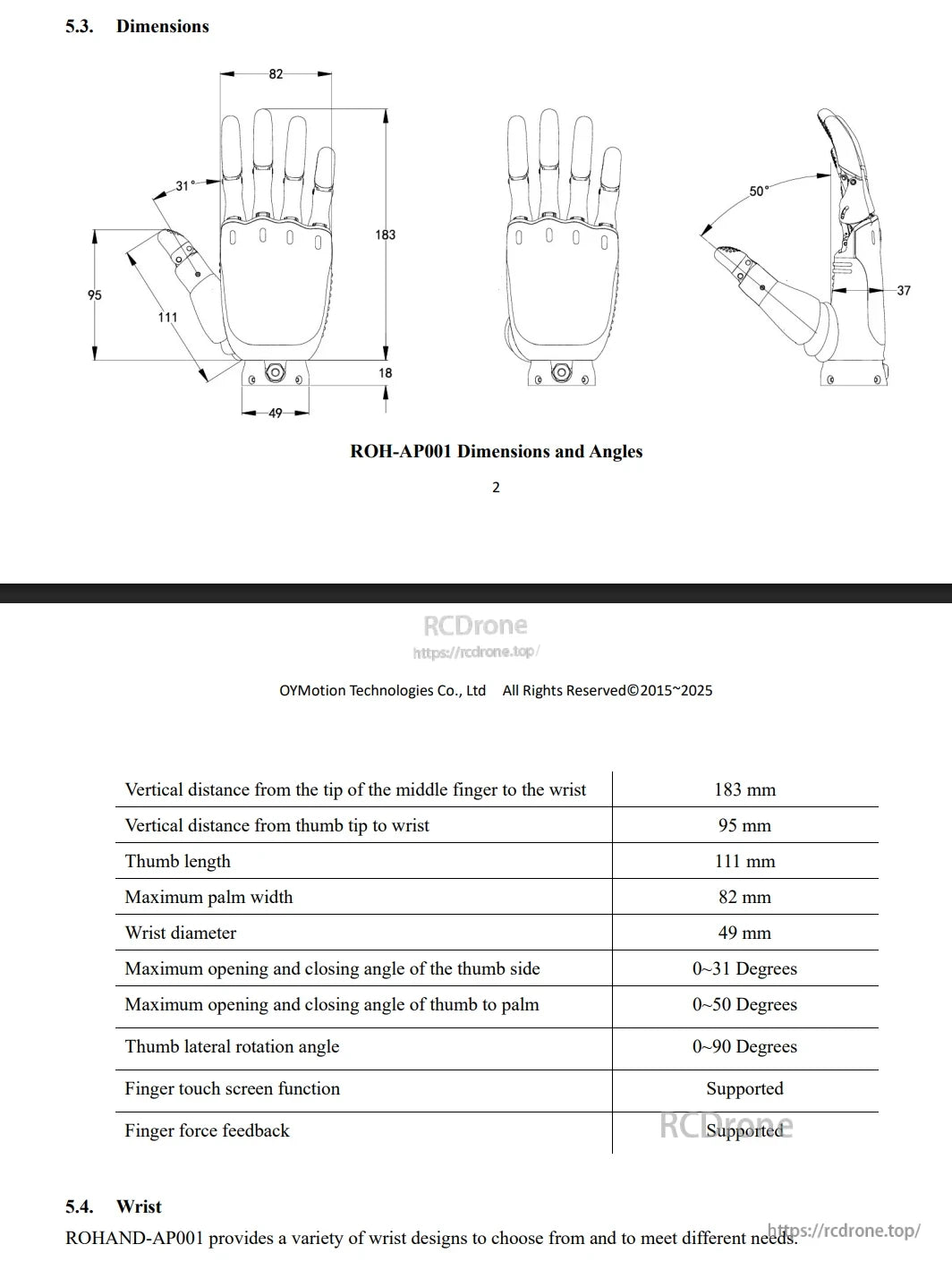
Размеры роботизированной руки ROH-AP001 включают высоту от пальца до запястья 183 мм, от большого пальца до запястья 95 мм, длину большого пальца 111 мм, ширину ладони 82 мм, диаметр запястья 49 мм. Углы большого пальца: 0-31° вбок, 0-50° к ладони, 0-90° вращение. Поддерживает сенсорный экран и обратную связь по силе.
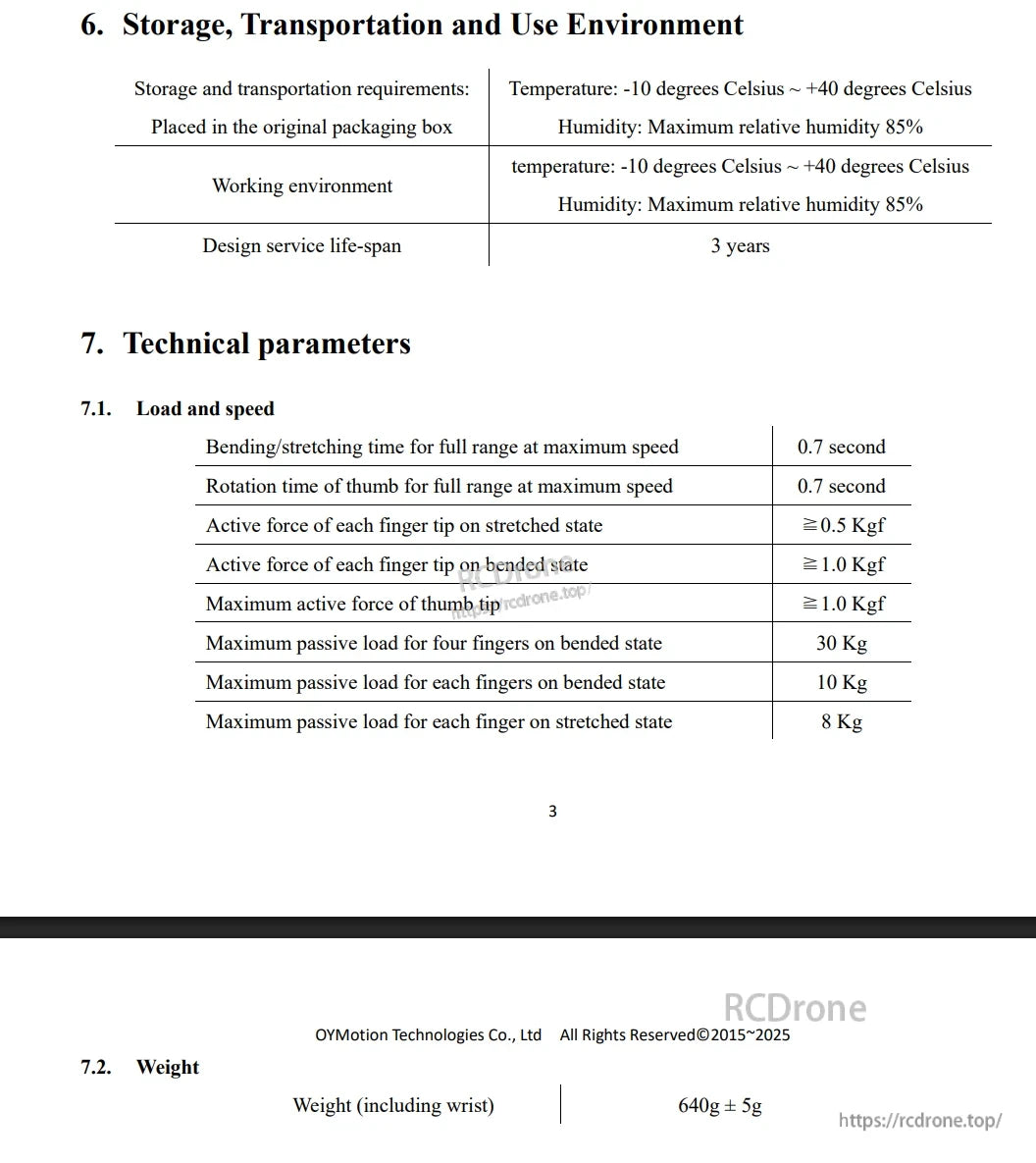
Роботизированная рука OYMotion ROH-AP001 работает в диапазоне температур от -10°C до +40°C, максимальная влажность 85%. Срок службы дизайна: 3 года. Вес: 640 г ±5 г. Активная сила пальца ≥0.5–1.0 Kgf; пассивная нагрузка до 30 кг для четырех пальцев.
Related Collections





