Характеристики 32-битного контроллера полета Pixhawk 2.4.8 PX4 PIX
Использование: Транспортные средства и игрушки с дистанционным управлением
Детали/аксессуары обновления: Рама
Инструменты: Шлифование
Технические параметры: Значение 3
Периферийные устройства/устройства дистанционного управления: Пульт дистанционного управления
Рекомендуемый возраст: 12+y,14+y
Детали и аксессуары для радиоуправления: Регуляторы скорости
Происхождение: Материковый Китай
Номер модели: Pixhawk 2.4.8
Материал: Металл
Атрибуты полного привода: Двигатели
Для типа транспортного средства: Самолеты
Название бренда: Readytosky
ReadyToSky — профессиональный поставщик аксессуаров для модулей FPV RC. Если вы хотите узнать больше об оптовых или оптовых закупках, свяжитесь с нами.
Особенности:
Pixhawk 2.4.8 поддерживает последнюю официальную прошивку ardupilot и прошивку PX4.
1. Усовершенствованные 32-разрядные высокопроизводительные процессоры ARM CortexM4 (флэш-память 2 МБ) могут работать под управлением операционной системы реального времени NuttX RTOS;
2. 14 ШИМ/выход сервопривода;
3. Интерфейс шины (UART, I2C, SPI, CAN);
4. Встроенный резервный источник питания и резервный контроллер выходят из строя, основной контроллер переключается на резервное управление в безопасности;
5. Обеспечить автоматический и ручной режимы;
6. Обеспечить резервный вход питания и аварийное переключение;
7. Многоцветные светодиодные фонари;
8. Обеспечить интерфейс многотонального зуммера
9. Micro SD запись данных полета;
Характеристики:
Интерфейс
1,5 совместимый с высоким напряжением UART 1, 2 с аппаратным управлением потоком данных
2. 2 CAN
3. Вход, совместимый со спутниковыми ресиверами Spektrum DSM/DSM2/DSM-X
4. Входы и выходы, совместимые с Futaba SBUS
5.Вход сигнала PPM
6. Вход RSSI (ШИМ или напряжение)
7.I2C
8.SPI
Вход 9.3.3 и 6,6 В пост. тока
10. Внешний интерфейс MICRO USB
OSD-дисплей Pixhawk для Pixhawk 2.4.8 PIX PX4 Управление полетом Дисплей полета Статус полета Подключен к интерфейсу I2C
Он подходит для управления полетом Pixhawk и т. д. и используется для отображения информации о состоянии самолета. Этот модуль подключен к интерфейсу I2C Pixhawk
Примечание. Чтобы обновить прошивку дисплея до версии 3.5 или более поздней, установите для NTF_DISPLAY_TYPE значение 1 в Massion Planner и перезапустите Pixhawk.
КАК использовать модуль WIFI для PIXHAWK?
1.Как подключиться?
используйте линию 6P для подключения к контроллеру полета pixhawk.
Из-за различий в прошивках некоторые прошивки могут использовать два порта, некоторые прошивки могут использовать только один из портов. Итак, найдите один из доступных портов для подключения.
ЕСЛИ вы используете прошивку PX4, можно использовать только TELEM1, нельзя использовать TELEM2.
Для прошивки Ardupilot рекомендуется использовать порт TELEM2. Или найдите один из доступных портов для подключения.
Для прошивки PX4 следует использовать порт TELEM1.
2.Как использовать?
Обратите внимание: при использовании подключения радиотелеметрии Wi-Fi необходимо использовать модуль питания 3DR или регулятор скорости 5 В для подачи питания на систему управления полетом. USB невозможно вставить, поскольку приоритет USB выше, чем у радиотелеметрии. Если USB-кабель подключен, его нельзя использовать для передачи радиотелеметрии.
Имя точки доступа Wi-Fi — Drone, поэтому используйте телефон или компьютер для подключения к этой точке доступа, пароль — 12345678.
Примечание. Некоторые устройства (например, некоторые системы iOS IOS) не могут получить IP-адрес автоматически, вам следует установить вручную.
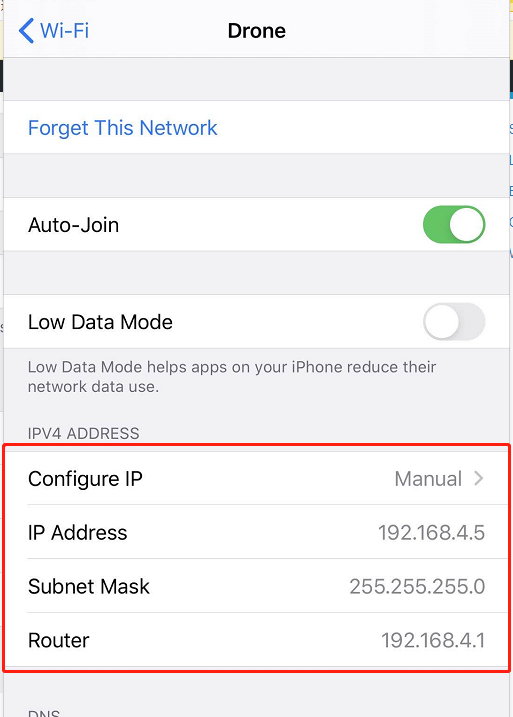
Установите настройку IP как вручную. Установите IP-адрес как «192.168.4.5» или другой, но не можете установить его как «192.168.4.1», последнее число не может превышать 254. Установите маску подсети как «255.255.255.0» (следует установить это значение, другое нельзя). Установите для маршрутизатора значение «192.168.4.1» (следует установить это значение, другое нельзя)
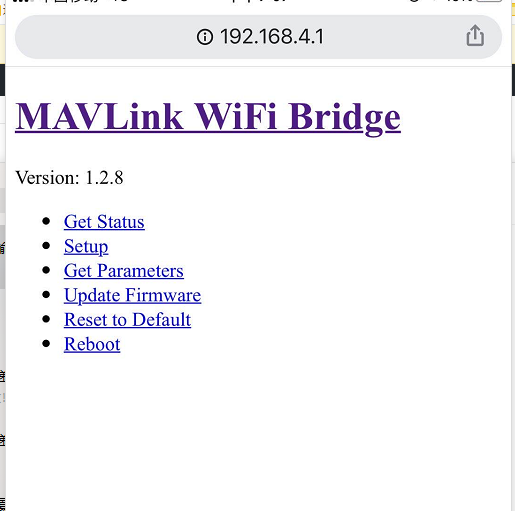
Когда ваше устройство успешно подключится к этой точке доступа, вы сможете использовать браузер для посещения http://192.168.4.1 , вы можете изменить параметр.
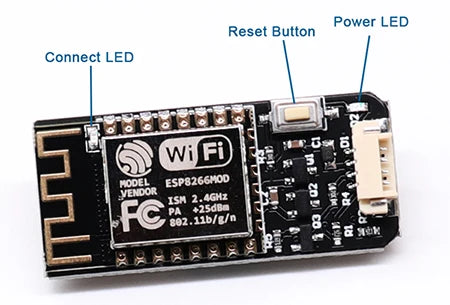
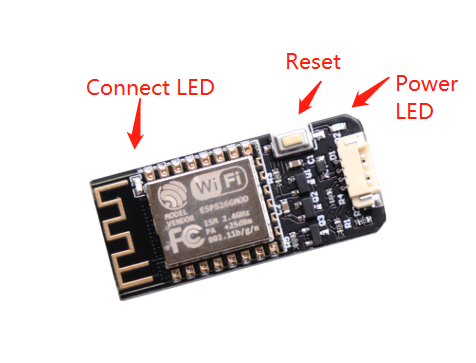
Обратите внимание, что эта кнопка является кнопкой сброса, а не кнопкой перезагрузки. При нажатии кнопки все параметры будут установлены по умолчанию, если вы измените какой-либо параметр.
Индикатор питания: при включении питания загорается красный светодиод.
Светодиод подключения: при успешном подключении к наземному элементу управления (например, Mission Planner или Qgroundcontrol) синий светодиод мигает. при отключении от наземного управления загорается синий светодиод.
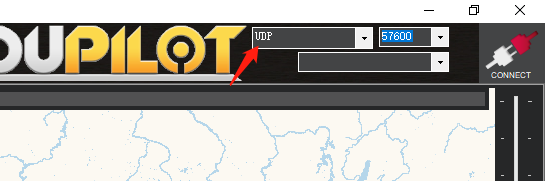
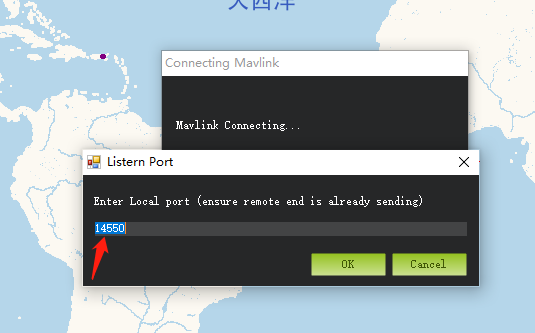
1.Как использовать планировщик миссий?
Во-первых, успешно подключите свой компьютер к точке доступа Drone . Выберите UDP. Затем нажмите кнопку «Подключиться», используйте порт 14550. Нажмите «ОК». Скорость передачи данных выбирать не нужно. Скорость передачи данных модуля Wi-Fi по умолчанию — 57 600. Но также может работать 115 200 или другая скорость.
2.Как использовать для телефона
Для Android: загрузите qgroundcontrol (только для pixhawk, не для APM)
отсюда,http://qgroundcontrol.com/downloads/
Загрузите DroidPlanner отсюда,https://github.com/DroidPlanner/Tower/releases
Для iPhone (IOS): Найдите qgroundcontrol в магазине приложений.
qgroundcontrol (только для pixhawk, не для APM) может подключаться автоматически, DroidPlanner должен выбрать порт «UDP» и «14550» перед подключением к groundcontrol.
WIFI V3.0 использует 32-битный процессор, поддерживает TCP и UDP
Веб-сайт WIFI V3.0 DroneBridge
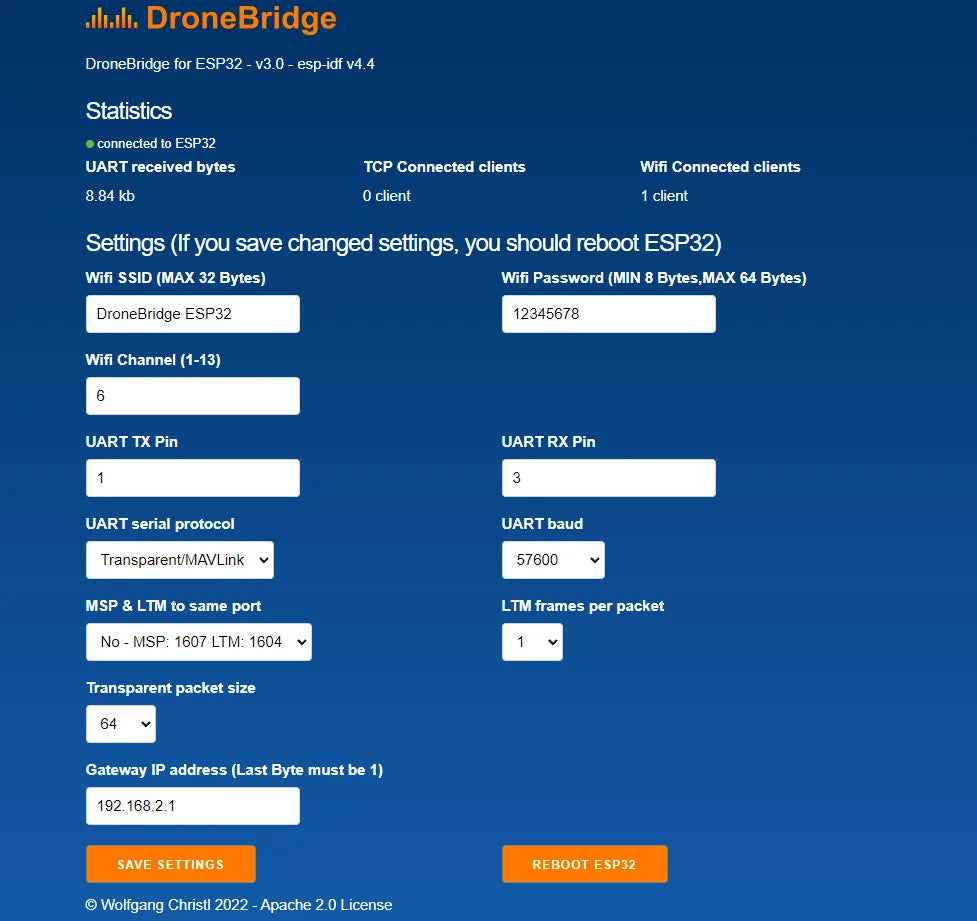
улул; DroneBridge для ESP32 v3.0 esp idf v4.4 Статистика подключена к ESP 32 Полученные UART байты TCP Подключенные клиенты Пароль Wi-Fi (МИН 8 байт, МАКС 64 байта) Если вы сохраните измененные настройки, вам следует перезагрузить ESP33 .
(отправьте по вашему выбору)

Пиксхок 2.4.8 FC + 4G TF-карта + MBN GPS Держатель GPS + экранное меню + модуль питания Амортизатор I2C PPM RGB Кнопка безопасности Зуммер Wi-Fi Телеметрические провода Ontk 'GPs Module PPM 1'

В комплект поставки входят: Pixhawk 2.4.8 контроллер полета, TF-карта 4G, амортизатор, модуль I2C, модуль PPM, модуль RGB, OLED-дисплей, кнопка безопасности с зуммером и провода для всех компонентов.
В комплект входит: Pixhawk 2.4. 8, TF-карта 4G, GPS-модуль MBN, держатель GPS, амортизатор, кнопка безопасности I2C, провода зуммера и дополнительный модуль телеметрии для беспроводной передачи данных.

В комплект входит: Pixhawk Контроллер полета 2.4.8, TF-карта 4G, амортизатор, OLED-дисплей, модуль I²C, модуль PPM (импульсная позиционная модуляция), кнопка безопасности с зуммером и провода.

Этот полет Pixhawk 2.4.8 Контроллер поставляется с TF-картой 4G, кнопкой безопасности, зуммером и проводами для вспомогательных выходов. Он также оснащен модулем TELEM с двумя входами питания, последовательным портом и каналами АЦП (аналогово-цифровой преобразователь). Кроме того, он имеет возможности GPS, и для его работы требуется питание.

Калибровка VCC, GPS и SD-карты необходима в режиме «Стабилизированный» при напряжении батареи 11,32 В. Кроме того, отсутствуют данные GPS. Предварительная постановка сохранена, и EKF (расширенный фильтр Калмана) включен.