Примечание:
PIXHAWK 2.4.8 поддерживает последнюю версию прошивки FMUV3 ardupilot и PX4.
1.Вы можете выбрать белый или черный корпус контроллера полета PIXHAWK, аппаратное обеспечение одинаковое. Белый корпус более красивый. Если вам нужен белый корпус, пожалуйста, оставьте сообщение.
2.Если в упаковке есть Модуль питания 3DR, по умолчанию мы отправляем модуль питания 3DR с разъемом XT60, если вам нужен T, пожалуйста, оставьте сообщение.
3. У Pixhawk много пакетов. Мы отправим вам пакет по вашему выбору.
Pixhawk PX4 Автопилот PIX 2.4.8 32-битный контроллер полета
Функции:
Pixhawk 2.4.8 поддерживает последнюю официальную прошивку Ardupilot и прошивку PX4.
1. Современные 32-битные высокопроизводительные процессоры ARM CortexM4 (флэш-память 2 МБ) могут работать под управлением операционной системы реального времени NuttX RTOS;
2. 14 ШИМ/серво выходов;
3. Интерфейс шины (UART, I2C, SPI, CAN);
4. Интегрированное резервное питание и резервный контроллер выходят из строя, основной контроллер переходит на резервное управление в безопасном режиме;
5. Обеспечить автоматический и ручной режимы;
6. Обеспечить резервный ввод питания и отказоустойчивость;
7. Разноцветные светодиодные фонари;
8. Обеспечить многотональный интерфейс зуммера
9. Micro SD запись данных полета;
Технические характеристики:
Интерфейс
1.5 высоковольтный совместимый UART 1, 2 с аппаратным управлением потоком
2. 2 МОЖЕТ
3. Вход, совместимый со спутниковым ресивером Spektrum DSM / DSM2 / DSM-X
4. Входы и выходы, совместимые с Futaba SBUS
5. Входной сигнал PPM
6. Вход RSSI (ШИМ или напряжение)
7.I2C
8.СПИ
Вход 9,3,3 и 6,6 В пост. тока
10.Внешний интерфейс MICRO USB
GPS-модуль M9N
M9N — это модуль GPS, обычно используемый в беспилотных летательных аппаратах, со следующими характеристиками и областями применения:
Высокоточное позиционирование: M9N использует передовую технологию GNSS, поддерживает несколько спутниковых навигационных систем и может предоставлять высокоточную информацию о местоположении. Для беспилотных летательных аппаратов он может достигать точного позиционирования и навигации.
Поддержка нескольких систем: M9N поддерживает несколько систем спутниковой навигации, включая GPS, ГЛОНАСС, Galileo, BeiDou и т. д. Это позволяет дронам одновременно принимать сигналы нескольких спутников, что повышает точность и надежность позиционирования.
Быстрое позиционирование: M9N имеет быстрое время холодного и горячего старта, что позволяет быстро получать спутниковые сигналы и выполнять позиционирование, что делает его критически важным для быстрого взлета и выполнения задач беспилотных летательных аппаратов.
Высокая помехозащищенность: M9N обладает превосходными помехозащищенными характеристиками, может стабильно работать в сложных электромагнитных условиях и невосприимчив к помехам от других электронных устройств.
В беспилотных летательных аппаратах M9N может использоваться в следующих целях:
Позиционирование и навигация: M9N предоставляет точную информацию о местоположении и скорости, помогая дронам осуществлять точную навигацию и управление полетом.
Навигация по точкам маршрута: вводя предварительно заданную информацию о точках маршрута в M9N, беспилотные летательные аппараты могут автоматически летать по маршруту, выполняя задачи автономной навигации по точкам маршрута.
Совместная работа нескольких дронов: несколько дронов могут использовать модуль M9N для позиционирования и синхронизации, выполняя такие задачи, как совместные полеты в группе и групповые полеты.
Возврат к возврату: M9N может предоставить точную информацию о местоположении возврата, что позволяет дрону безопасно вернуться в точку взлета или в заданную точку возврата.
M9N может выполнять поиск большего количества спутников на открытом воздухе с более высокой точностью, более высокой скоростью поиска и лучшей стабильностью. (Конкретное количество поисков звезд определяется окружающей средой в данный момент времени.)
Pixhawk PX4 с M9N GPS Подробности
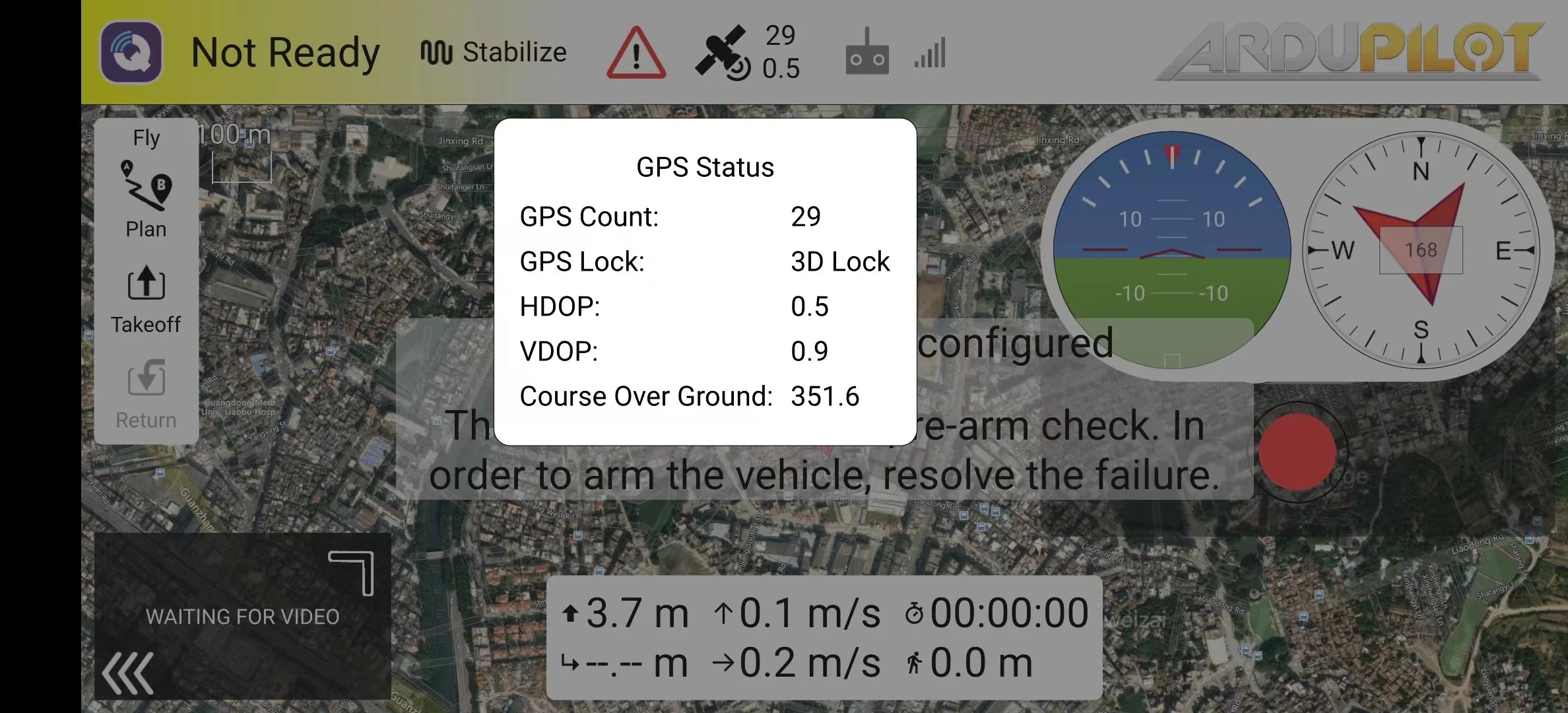
Не готов к автопилоту. Стабилизировать 2.5 ARDUINO Fly Road Linxing Road Статус GPS: Shuitangshan, Lr Количество GPS: 29/10/10 План W-168. Блокировка GPS: 3D Lock 10 градусов. HDOP: 0.5. Взлет VDOP: 0.9. Настроен для навигации в миле Гуандун. Курс над землей: 351.6. Университетская больница Ляобу Возврат Пути, проверка: ожидание видео. Нацеливание на вооружение транспортного средства, устранение сбоя.