RCDrone T5001-10 и TS5001-10 1Н·м бесщеточный сервопривод FOC с двумя энкодерами RS485/CAN 1:10 редуктор сервопривода для роботов
RCDrone T5001-10 и TS5001-10 1Н·м бесщеточный сервопривод FOC с двумя энкодерами RS485/CAN 1:10 редуктор сервопривода для роботов
RCDrone
Не удалось загрузить сведения о доступности самовывоза
Обзор
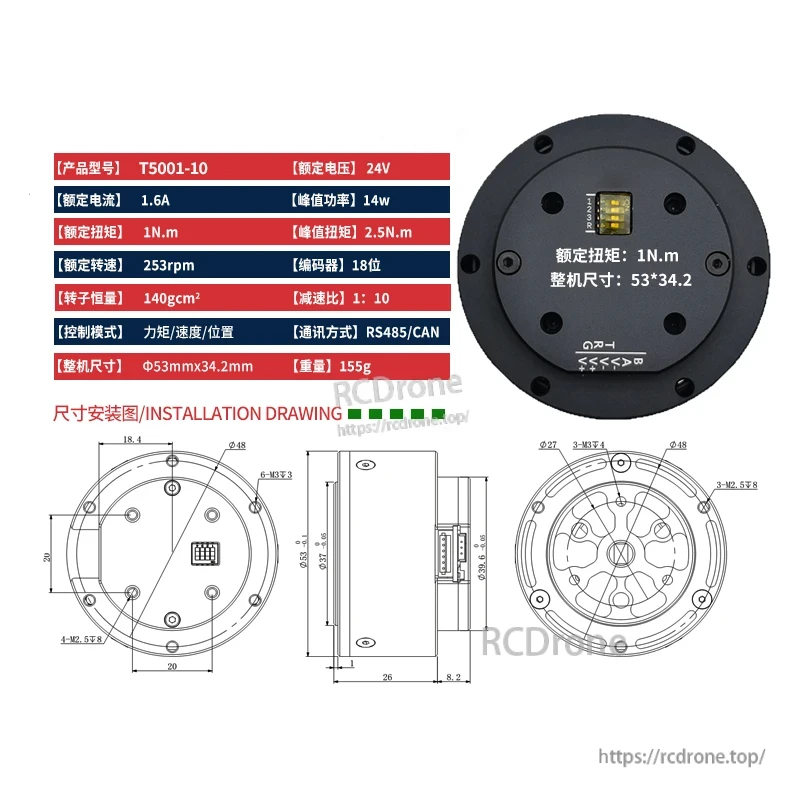
Моторы RCDrone T5001-10 и TS5001-10 являются компактными, высокопроизводительными бесщеточными сервомодулями с приводом MIT, разработанными для передовых робототехнических приложений. Они обладают номинальным крутящим моментом 1Н·м, пиковым крутящим моментом 2.5Н·м, номинальной скоростью 253–255 об/мин и планетарным редуктором с передаточным отношением 1:10, что позволяет этим сервомодулям обеспечивать высокую мощность, большой крутящий момент и высокую точность в легком форм-факторе. Оснащенные двойным абсолютным энкодером 18 бит (T5001-10) или 18 бит + 14 бит (TS5001-10), они обеспечивают точную обратную связь по положению с однократной калибровкой и установкой нулевой точки. Связь поддерживается через интерфейс RS485/CAN, что обеспечивает надежную передачу данных для систем управления робототехникой.
Ключевые особенности
-
Высокая точность обратной связи – 18-битный или двойной кодировщик для точного управления движением.
-
Высокая плотность крутящего момента – номинальный крутящий момент 1N·m, пиковый крутящий момент 2.5N·m, компактный корпус Φ53mm.
-
Управление FOC – Управление с ориентацией на поле для плавной и эффективной работы.
-
Несколько режимов управления – управление крутящим моментом, скоростью и положением.
-
Промышленная связь – RS485/CAN с поддержкой UART для гибкой интеграции.
-
Прочный корпус – Разработан для робототехники, обеспечивая стабильность в длительной эксплуатации.
-
Легкий и компактный – всего 155g (T5001-10) или 183g (TS5001-10), идеально подходит для конструкций с ограниченным пространством.
Технические характеристики
| Модель | T5001-10 | TS5001-10 |
|---|---|---|
| Номинальное напряжение | 24В | 24В |
| Номинальный ток | 1.6A | 1.6A |
| Пиковая мощность | 14W | 14W |
| Номинальный крутящий момент | 1N·м | 1N·м |
| Пиковый крутящий момент | 2.5N·м | 2.5N·m |
| Номинальная скорость | 253 об/мин | 255 об/мин |
| Энкодер | 18-битный абсолютный | 18-битный + 14-битный абсолютный |
| Инерция ротора | 140 г·см² | 140 г·см² |
| Передаточное отношение | 1:10 планетарное | 1:10 планетарное |
| Режимы управления | Крутящий момент / Скорость / Позиция | Крутящий момент / Скорость / Позиция |
| Связь | RS485 / CAN | RS485 / CAN |
| Размеры | Φ53 × 34.2мм | Φ53 × 36мм |
| Вес | 155г | 183г |
Определение интерфейса
| Контакт | Функция |
|---|---|
| A/H | RS485-A или CAN-H |
| B/L | RS485-B или CAN-L |
| V- | Отрицательное питание |
| V+ | Положительное питание |
| T | UART передатчик |
| R | UART приемник |
| G | Заземление сигнала |
Применения
-
Роботы на ногах – Стабильное управление движением для четвероногих и гуманоидов.
-
Промышленные роботы – Высокоточные сервоприводы для роботизированных рук.
-
Патрульные роботы – Надежные приводы для автономных мобильных платформ.
-
Медицинские роботы – Легкие и точные для экзоскелетов и реабилитационных устройств.
Детали



Related Collections