




ROBOTERA XHAND 1 Роботизированная рука - 12 степеней свободы, тактильные кончики пальцев 270°, захват 80Н, подъём 25 кг, EtherCAT/RS485, поддержка ROS
ROBOTERA XHAND 1 Роботизированная рука - 12 степеней свободы, тактильные кончики пальцев 270°, захват 80Н, подъём 25 кг, EtherCAT/RS485, поддержка ROS
ROBOTERA
Не удалось загрузить сведения о доступности самовывоза
Обзор
ROBOTERA XHAND 1 - это роботизированная рука с пятью пальцами, имеющая полные модули прямого привода суставов и 12 активных степеней свободы. Рука имеет размер, сопоставимый с человеческой (191 мм x 94 мм x 47 мм), и предназначена для ловкой манипуляции с высоким разрешением тактильного восприятия, надежной силой захвата и удобными интерфейсами для исследований в области робототехники и интеграции.
Ключевые особенности
- Полная архитектура прямого привода с интегрированными модулями суставов с приводом от шестерен и контролем силы (3 в большом пальце; 9 в остальных четырех пальцах).
- 12 полностью активных степеней свободы; боковой поворот указательного пальца на +/-15° для сложной манипуляции в руке.
- Высокая производительность захвата: сила на кончике пальца 15N; максимальная сила захвата 80N; максимальный вес захвата до 25 кг (ладонью вверх) и 16 кг (ладонью вбок).
- Высокоскоростное приведение в действие с поддержкой >2Гц повторения открывания/закрывания; продемонстрированное щелкание пальцами до 10 CPS (щелчков в секунду).
- 270° тактильное покрытие на кончиках пальцев с пятью трехмерными тактильными датчиками; разрешение всей руки 12x10 на кончик пальца x 5.
- Трехмерное измерение силы, включая тангенциальные силы (X и Y); точность повторного позиционирования на кончике пальца +/-0.20 мм.
- Обратимо с демпфированием <= 0.1 Нм; управление силой по замкнутому контуру и управление силой-позиции для совместного взаимодействия.
- Удобное для разработчиков подключение: EtherCAT и RS485 (USB); совместимо с ROS1/ROS2, Ubuntu (Linux), архитектурами x86 и ARM, TwinCAT и общими роботизированными манипуляторами (включая xARM, Realman, UR).
- Долговечность, рассчитанная на 1,000,000 циклов захвата без нагрузки; рабочая температура -20°C ~ 60°C.
Для запросов, поддержки интеграции или оптовых закупок, свяжитесь с [email protected] or посетите https://rcdrone.top/.
Спецификации
| Параметр | Значение |
|---|---|
| Вес | 1100 г |
| Размеры (Д x Ш x В) | 191 мм x 94 мм x 47 мм (Размер взрослой руки) |
| Активные степени свободы (Всего) | 12 |
| Пассивные степени свободы (Всего) | 0 |
| Распределение степеней свободы | Большой палец x 3; Указательный палец x 3; Средний палец x 2; Безымянный палец x 2; Мизинец x 2 |
| Привод/Передача большого пальца | 3-ступенчатый модуль с управляемым силой суставом на шестеренках |
| Привод/Передача четырех пальцев | 9-ступенчатый модуль с управляемым силой суставом на шестеренках |
| Конфигурация кончиков пальцев | Круглые или закругленные кончики пальцев |
| Боковой наклон | -15°~+15° (Указательный) |
| Точность позиционирования повторения на кончике пальца | +/− 0.20 мм |
| Режимы управления | Управление положением (низкое демпфирование/высокое демпфирование), управление силой по кругу, управление силой-положением |
| Сила на кончике пальца | 15N |
| Максимальная сила захвата (вся рука) | 80N |
| Максимальный вес захвата (ладонь влево) | 16 кг |
| Максимальный вес захвата (ладонь вверх) | 25 кг |
| Наибольшее противодействие большого пальца | Маленький мизинец |
| Скорость повторения открытия/закрытия | >2Гц |
| Демпфирование обратного привода (обратный привод) | <= 0.1 Нм |
| Тактильное покрытие | 270° охват пяти пальцев |
| Количество тактильных датчиков | Пять трехмерных охватывающих тактильных массивов датчиков на пяти кончиках пальцев с углом 270° |
| Тактильное разрешение (вся рука) | 12x10 (270° охват на каждый кончик пальца) x 5 |
| Размеры тактильного восприятия | Трехмерное измерение силы (включая касательные силы X и Y) |
| Частота управления всей рукой | 83 Гц |
| Скорость передачи данных | EtherCAT: 100 МГц; RS485: 3 МГц |
| Параметры восприятия | Кончики пальцев: 120 трехмерных профилирующих сил; Суставы: положение, скорость, температура, ток (момент) |
| Параметры управления | Положение сустава; момент силы сустава; коэффициент жесткости сустава; коэффициент демпфирования сустава |
| Циклы захвата без нагрузки | 1,000,000 циклов |
| Диапазон рабочих температур | -20°C ~ 60°C |
| Рабочее напряжение | 24V ~ 72V |
| Статический ток | 0.15A @48V, 7W |
| Максимальный ток | 2.5A @48V, 120W |
| Интерфейс связи | RS485 (USB), EtherCAT |
Применения
- Телеприсутствие: поддержка MR и телеприсутствия с перчатками; телеприсутствие Vision Pro; Manus Gloves; Pico/Meta Quest.
- Интеграция с роботизированной рукой и гуманоидом: совместимость с xARM, Realman, UR и другими роботизированными руками.
- Исследования и симуляции: точный URDF, симуляция тактильного восприятия; подходит для обучения с подкреплением с Isaac Gym и Mujoco.
- Взаимодействие человека и машины и управление человеческими инструментами с контролем силы.
Руководства
Xhand_adapter.stp
MH2.25_right_stp.zip
MH2.25_left_stp.zip
XHand_Control_ROS_Documentation.pdf
X-Hand_1_Product_Manual_1.0.pdf
X-Hand_1_User_Quick_Start_Instructions_1.0.pdf
Детали

ROBOTERA XHAND1 - роботизированная рука с полным прямым приводом, предлагающая истинную свободу и продвинутую ловкость.

XHAND1 от ROBOTERA: гуманоидная рука с пятью пальцами и 12 степенями свободы, 270° тактильные датчики на кончиках пальцев, сила захвата 80N, грузоподъемность 25 кг. Разработана для выполнения сложных задач и работы с инструментами.

XHAND 1: Первая ловкая рука с модулями прямого привода на каждом суставе. Оснащена мощными беспроводными моторами, редукторами с низким демпфированием, прецизионными энкодерами и самостоятельно разработанными интегрированными суставными модулями для продвинутой роботизированной манипуляции.
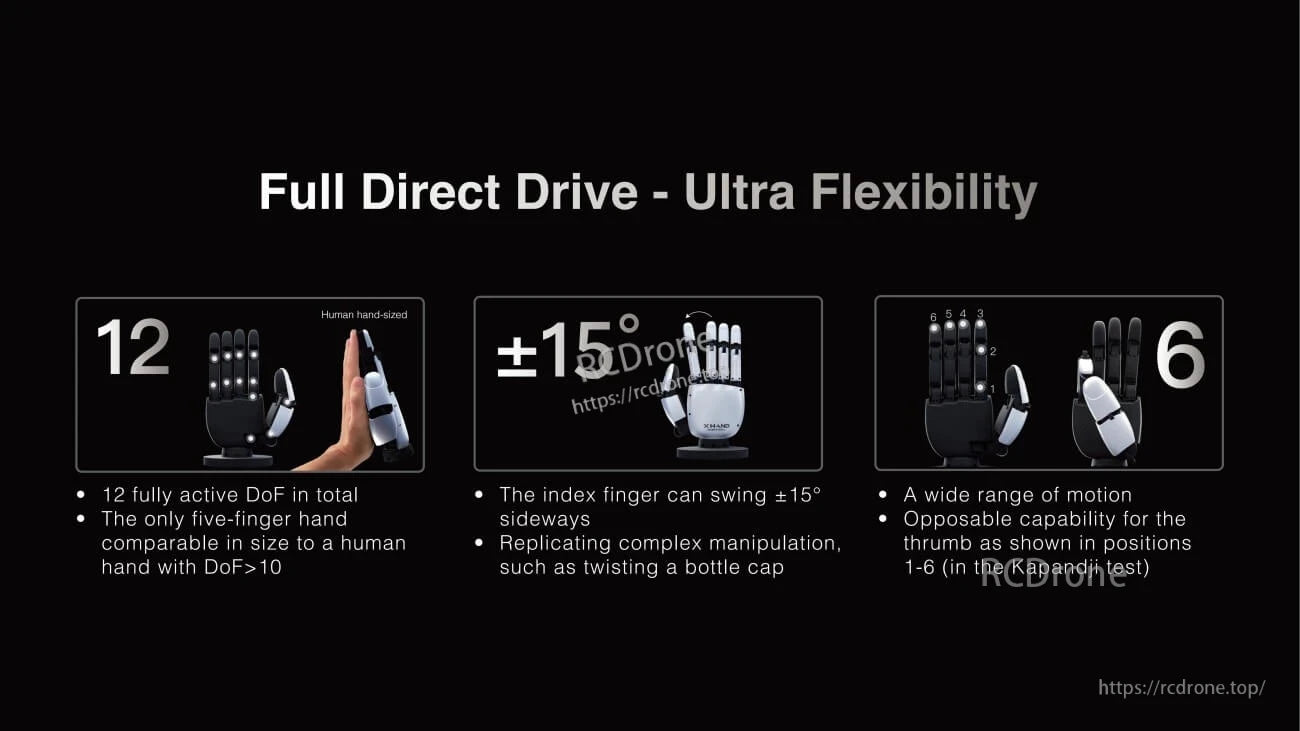
ROBOTERA XHAND 1 - ультрагибкая роботизированная рука человеческого размера с 12 активными степенями свободы. Указательный палец движется ±15° в стороны для выполнения сложных задач, а большой палец предлагает шесть противопоставленных положений для универсальной манипуляции.

ROBOTERA XHAND 1: нагрузка 25 кг, сила захвата 80 Н, полный прямой привод, превосходит аналогичные решения на основе связок/сухожилий.

Роботизированная рука с полным прямым приводом достигает 10 CPS с помощью скорости, управляемой шестернями, крутящего момента более 1 Нм, превосходя системы связок и сухожилий для превосходной игровой производительности.

ROBOTERA XHAND 1 имеет сенсоры на кончиках пальцев с углом 270° и >100 точек и точностью 0,05 Н для 3D-силы, тактильного и температурного восприятия, обеспечивая превосходную производительность захвата.
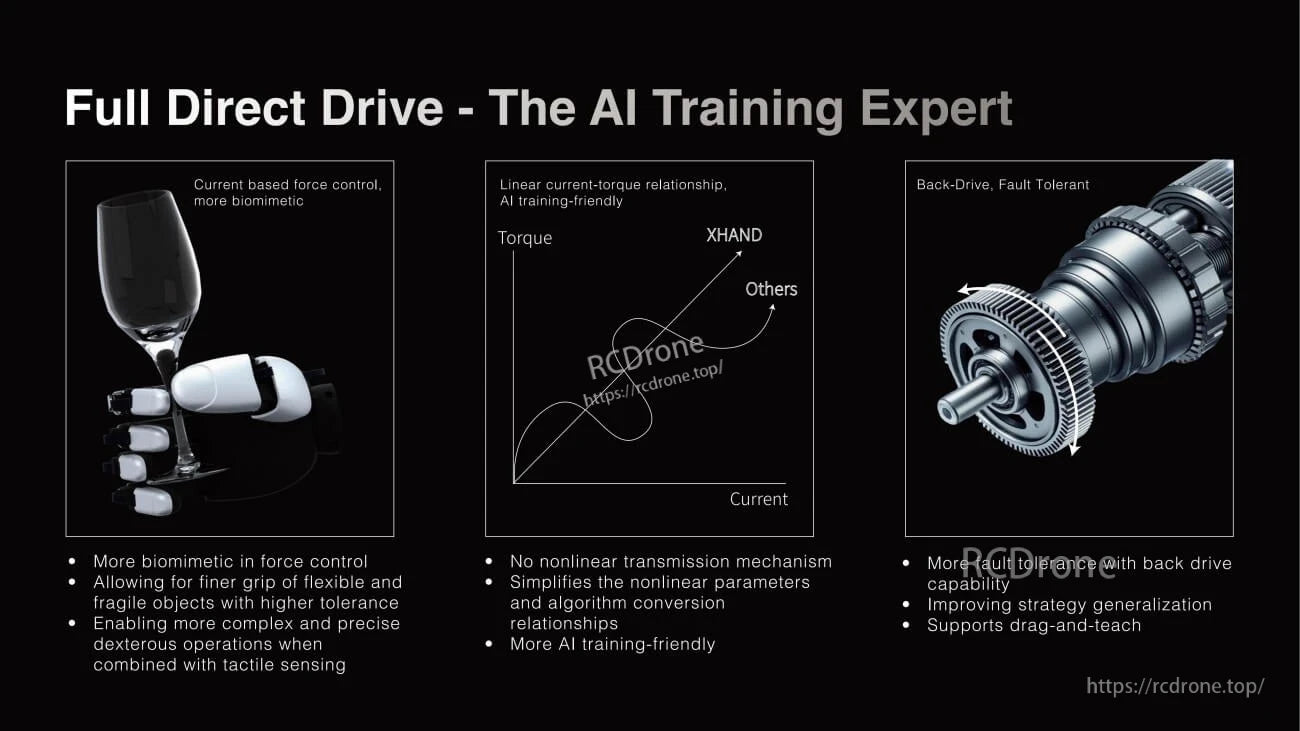
ROBOTERA XHAND 1 предлагает биомиметический контроль силы, линейный отклик крутящего момента и тока для обучения ИИ, а также устойчивость к сбоям обратного привода — что позволяет точно управлять, упрощать алгоритмы, поддерживать перетаскивание и обучение, а также улучшать обобщение стратегий.
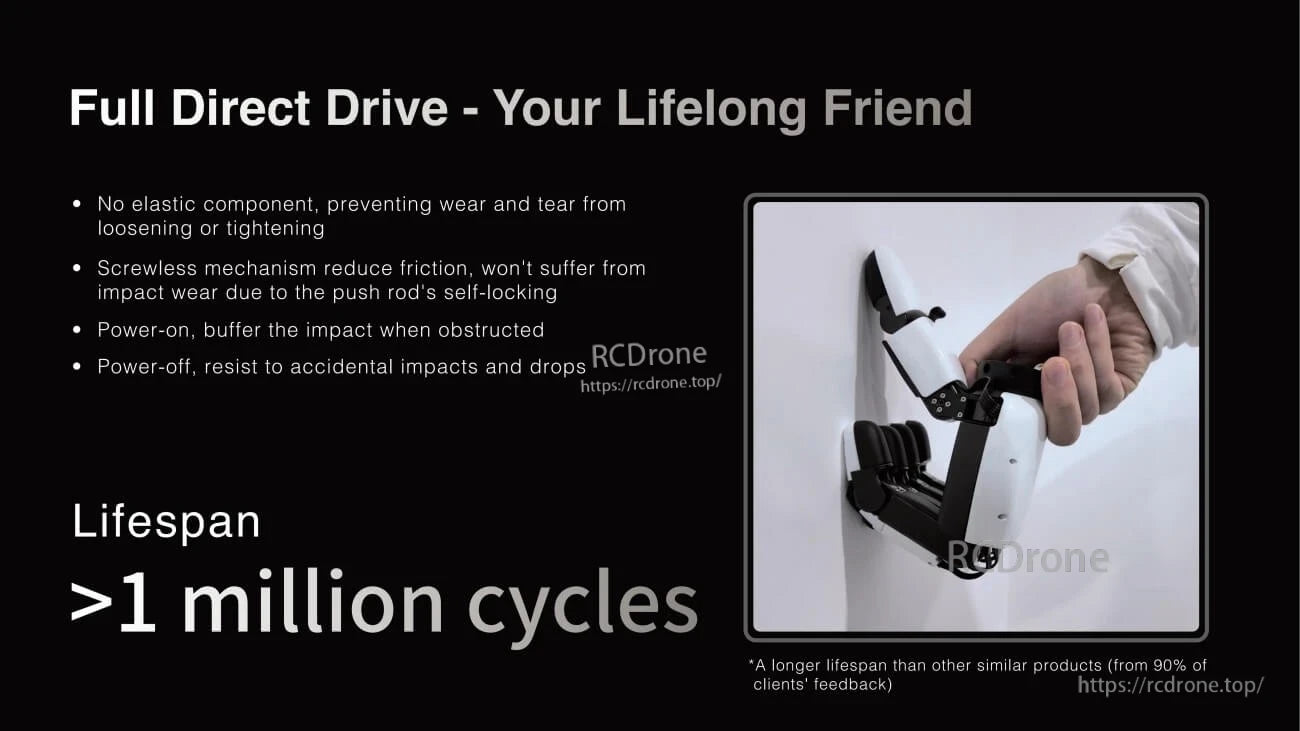
Полноценная роботизированная рука с прямым приводом предлагает долговечность без эластичных частей или винтов, амортизацию ударов при включении, устойчивость к падениям при выключении и срок службы, превышающий один миллион циклов — превосходя аналогичные продукты по отзывам клиентов.

ROBOTERA XHAND 1 поддерживает телеприсутствие MR и перчаток, совместим с ROS1/ROS2 и Ubuntu на x64/ARM. Оснащен EtherCAT/TwinCAT/RS485 для интеграции с xARM, Realman, UR роботизированными руками. Предлагает точное моделирование URDF и симуляцию тактильного восприятия. Разработан для удобных в использовании робототехнических приложений с кроссплатформенной гибкостью и продвинутыми протоколами управления.
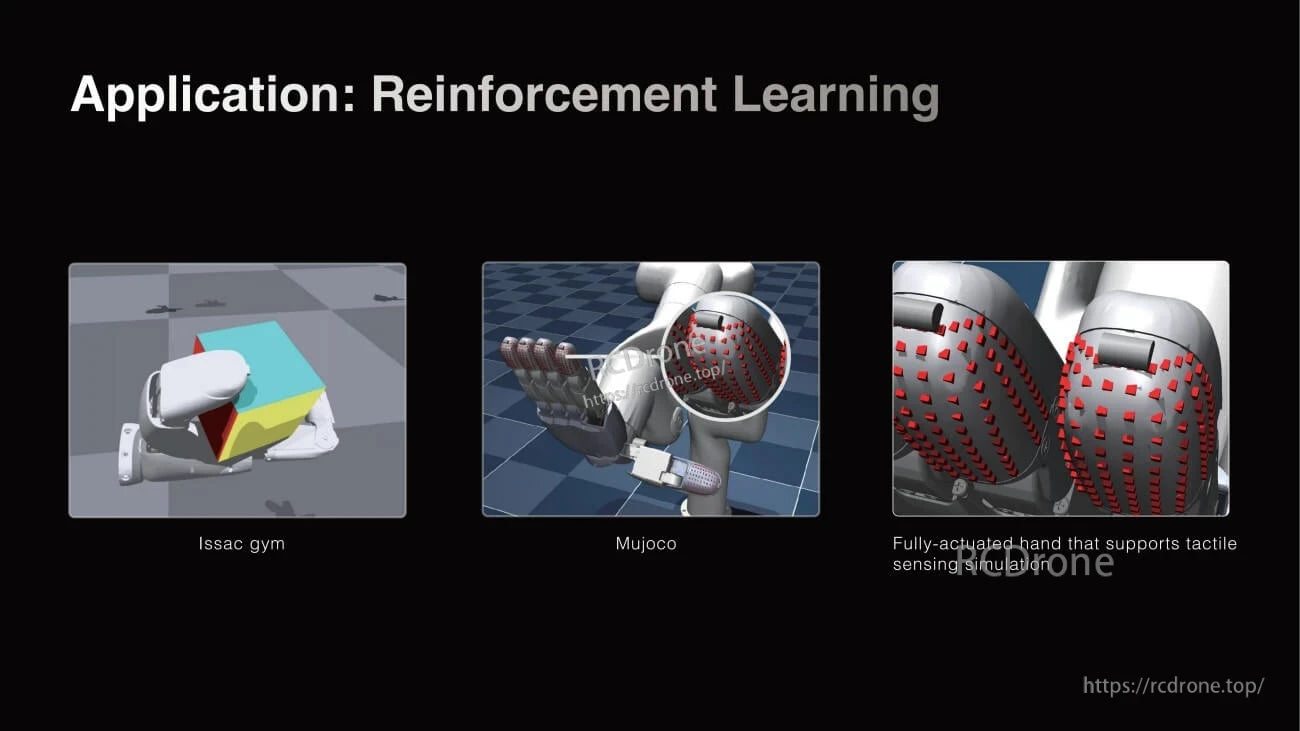
Приложения обучения с подкреплением: Issac gym, Mujoco и полностью активированная рука с симуляцией тактильного восприятия для продвинутого управления роботами и учебных сред.
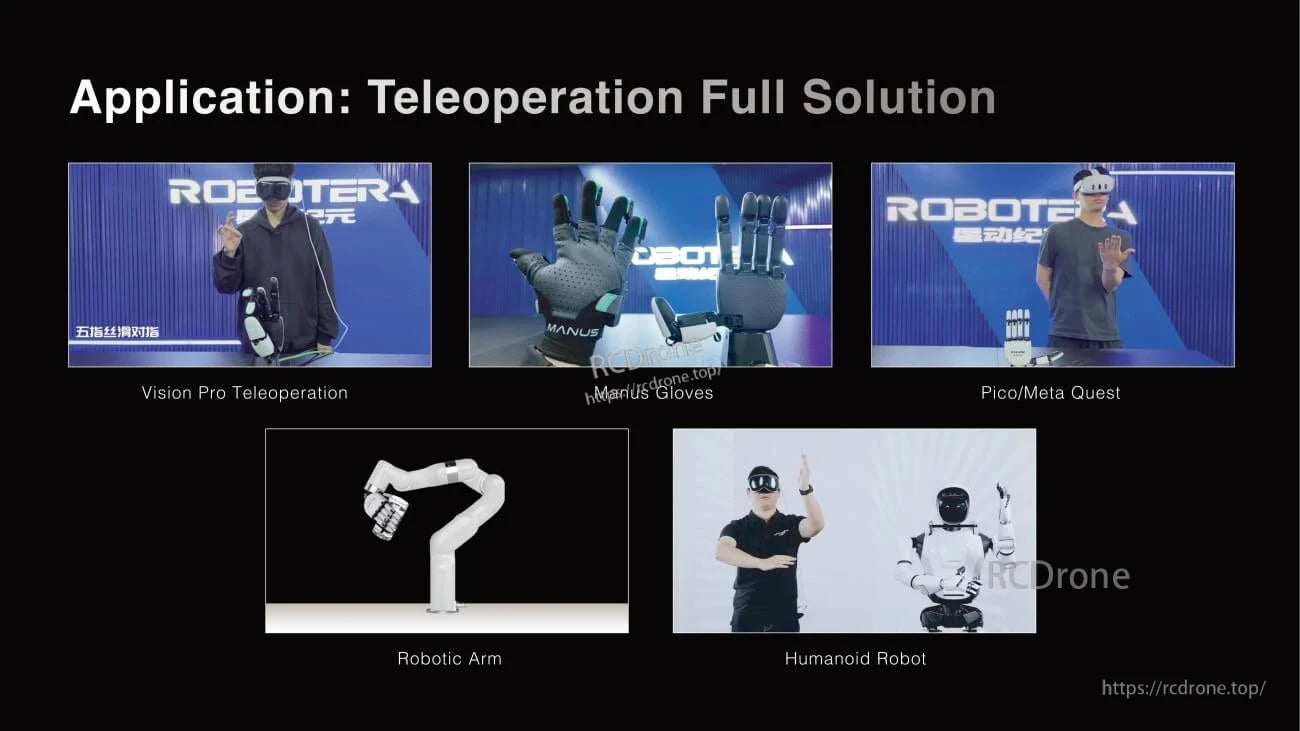
Полное решение для телеприсутствия с Vision Pro, перчатками Manus, Pico/Meta Quest, роботизированной рукой и гуманоидным роботом для продвинутого дистанционного управления.
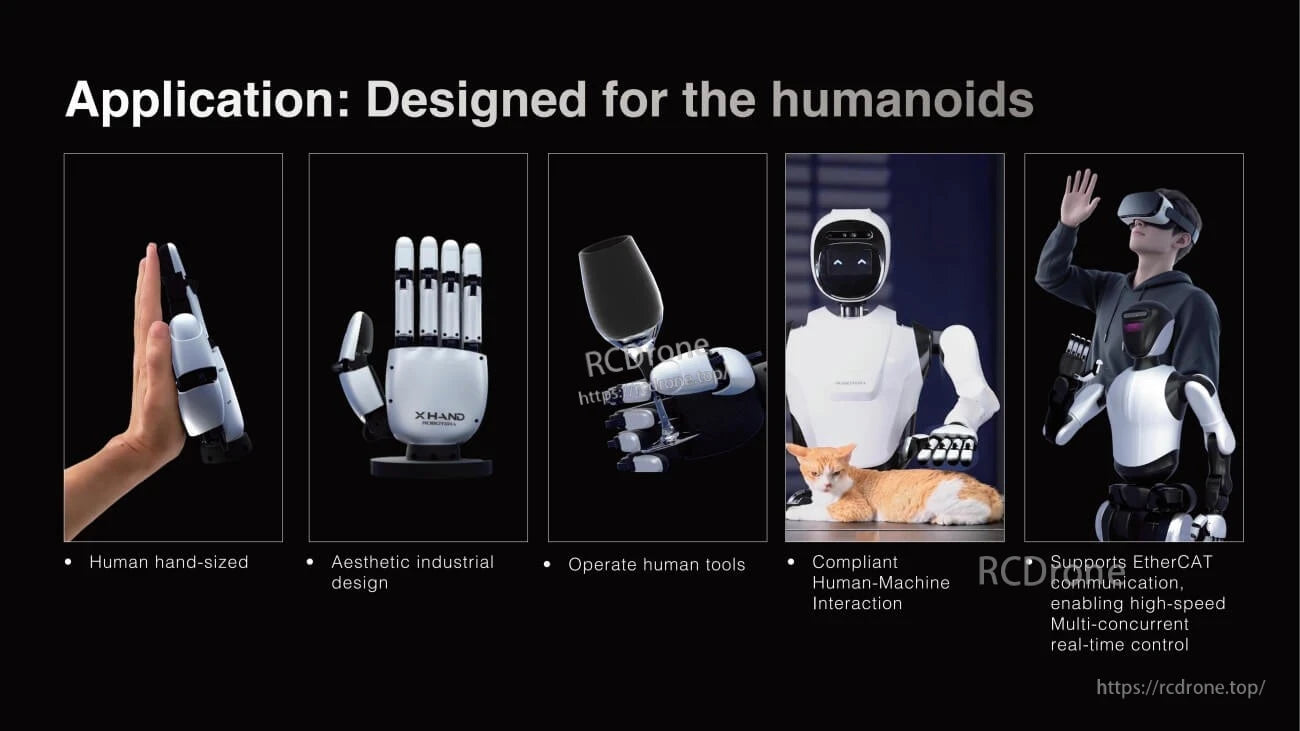
Рука робота размером с человека с эстетичным дизайном, управляет инструментами, обеспечивает совместное взаимодействие, поддерживает EtherCAT для управления в реальном времени.
Related Collections




