Программируемый дрон S2-F290 — Pixwawk с открытым исходным кодом ROS SLAM AI, вторичная разработка, промышленный уровень для задач дронов
Программируемый дрон S2-F290 — Pixwawk с открытым исходным кодом ROS SLAM AI, вторичная разработка, промышленный уровень для задач дронов
RCDrone
Не удалось загрузить сведения о доступности самовывоза
Обзор
The Программируемый дрон S2-F290 это высокопроизводительный промышленный дрон разработан для вторичного развития и испытаний дронов. грузоподъемность 2400 г, а Аккумулятор 6S 6000 мАч, и максимальная дальность управления 10км, он обеспечивает точность с Точность определения местоположения GPS ≈1–2 м и Ветроустойчивость 3–4 уровня. Работает на Контроллер полета Pixhawk 2.4.8 с Технология ROS SLAM с открытым исходным кодом, дрон поддерживает расширенные функции, такие как 3D LiDAR-картирование, распознавание объектов на основе YOLO и полеты в строю. Его Рама из углеродного волокна толщиной 3 мм обеспечивает исключительную прочность и стабильность, проверенную в экстремальных условиях. Платформа обладает высокой степенью настраиваемости, предлагая такие функции, как поддержка наземной станции QGC на китайском/английском языках, модульное расширение и комплексные обучающие материалы, что делает ее идеальной для исследовательских, соревновательных и опытно-конструкторских приложений.
Спецификация
Самолеты
| Параметр | Спецификация |
|---|---|
| Имя | Программируемый дрон S2-F290 |
| Вес полезной нагрузки | 2400г |
| Модель | С2-Ф290 |
| Точность определения местоположения GPS | ≈1–2м |
| Колесная база | 290мм |
| Максимальный взлетный вес | 3190г |
| Аккумулятор | 6S стандартный аккумулятор емкостью 6000 мАч |
| Дистанция управления | 10КМ (рекомендуется в пределах 1000м) |
| Сопротивление ветру | Уровень 3–4 |
| Операционная среда | В помещении/на открытом воздухе |
| Результаты испытаний на выносливость | Подробности |
|---|---|
| Пропеллеры | 7-дюймовый |
| Емкость аккумулятора | 6S 6000 мАч (использовано 5300 мАч) |
| Среда | Безветренный |
| Время полета | 11 минут 30 секунд |
Контроллер полета
| Компонент | Спецификация |
|---|---|
| Процессор FMU | STM32H743 Cortex-M7, 480 МГц, 2 МБ флэш-памяти, 1 МБ SRAM |
| Процессор ввода-вывода | STM32F103 Cortex-M3, 72 МГц, 64 КБ SRAM |
| Датчики | Акселерометр/гироскоп: ICM-42688-P |
| Акселерометр/гироскоп: BMI055 | |
| Магнитометр: IST8310 | |
| Барометр: MS5611 | |
| Номинальное напряжение | Максимальное входное напряжение: 6 В |
| Входное напряжение USB: 4,75–5,25 В | |
| Вход сервопривода: 0-36 В | |
| Номинальный ток | Телеметрия 1 Максимальный выходной ток: 1 А |
| Суммарный ток для других портов: 1А | |
| Механические данные | Размеры: 53,3 × 39 × 16,2 мм |
| Вес: 39.2г | |
| Порты | - 14 выходов ШИМ (8 от IO, 6 от FMU) |
| - 2 последовательных порта общего назначения | |
| - 2 порта GPS | |
| - 1 порт I2C | |
| - 2 CAN-порта | |
| - Вход RC для Spektrum/DSM, S.BUS, CPPM и т. д. | |
| - Порт ввода питания | |
| Другие особенности | Рабочая температура: -40–85°C |
Бортовой компьютер
| Компонент | Спецификация |
|---|---|
| Вычислительная мощность | 40 ТОПОВ |
| ГПУ | 32 ядра Tensor с 1024-ядерным графическим процессором NVIDIA Ampere |
| Процессор | 6-ядерный Arm Cortex-A78AE v8.2 64-бит, 1,5 ГГц |
| БАРАН | 8 ГБ 128-бит LPDDR5 68 ГБ/с |
| Хранилище | SD-карта или внешний NVMe |
| Максимальная частота ЦП | 1,5 ГГц |
Пульт дистанционного управления
| Компонент | Спецификация |
|---|---|
| Рабочее напряжение | 4.2В |
| Рабочий ток | 100мА |
| Диапазон частот | 2,4–2,483 ГГц |
| Масса | 525г |
| Размеры | 130 × 150 × 20 мм |
| Срок службы батареи | 20 часов |
| Порт зарядки | МИКРО-USB |
| Диапазон управления | 7 КМ |
GPS
| Компонент | Спецификация |
|---|---|
| Спутниковый ресивер | UBLOX-M9, 92 канала |
| Электронный компас | QMC5883L |
| Спутниковые системы | GPS L1 C/A, ГЛОНАСС L1OF, BeiDou B1, Galileo E1 |
| Спутниковые каналы | 32 |
| Скорость обновления | 25 Гц |
| Точность позиционирования | 1,5 м CEP (идеальная среда) |
| Время запуска | Холодный старт: 24 с, Горячий старт: 1 с |
| Размеры | 25 × 25 × 8 мм |
| Масса | 12г |
Аккумулятор
| Компонент | Спецификация |
|---|---|
| Тип разъема | XT60 |
| Рекомендуемый ток заряда | 3–5А |
| Емкость аккумулятора | 6000 мАч |
| Номинальное напряжение | 22.2В |
| Скорость разряда | 75С |
| Размеры | 50 × 44 × 158 мм |
| Масса | 816г |
ЛиДАР
| Компонент | Спецификация |
|---|---|
| Длина волны лазера | 905 нм |
| Диапазон | 40 м при 10% отражательной способности, 70 м при 80% отражательной способности |
| Минимальная зона обнаружения | 0,1м |
| Поле зрения | Горизонтально: 360°, вертикально: от -7° до 52° |
| Вывод облака точек | 200 000 точек/секунду |
| Ставка по очкам | 10Гц |
| Уровень защиты | IP67 |
| Власть | 6,5 Вт (при температуре окружающей среды 25°C) |
| Диапазон напряжения | 9–27 В постоянного тока |
| Размеры | 65 × 65 × 60 мм |
| Масса | 265г |
Камера глубины
| Компонент | Спецификация |
|---|---|
| Глубинная технология | Двойной инфракрасный |
| Угол обзора глубины | 87° × 58° (по горизонтали × по вертикали) |
| Разрешение глубины | 1280 × 720 |
| Точность глубины | <2% в течение 2 м |
| Частота кадров глубины | 90 кадров в секунду |
| Диапазон глубины | 0,3–3 м |
| Размеры | 90 × 25 × 25 мм |
| Операционная среда | В помещении/на открытом воздухе |
Однообъективная камера
| Компонент | Спецификация |
|---|---|
| Максимальное разрешение | 2МП (1920 × 1080) |
| Максимальная частота кадров | 30 кадров в секунду |
| Поле зрения | ~90° |
| Длина кабеля | ~1.5м |
| Размеры | 35 × 35 × 30 мм |
Таблица функций
| соборование | Базовая конфигурация | Дополнительный D435 | Дополнительный модуль D435 + 4G |
|---|---|---|---|
| Удержание высоты, зависание, возвращение домой | ✔ | ✔ | ✔ |
| Посадка, стабилизация, полет по контрольной точке | ✔ | ✔ | ✔ |
| Дистанционно управляемый полет | ✔ | ✔ | ✔ |
| Связь между контроллером полета и бортовым компьютером | ✔ | ✔ | ✔ |
| Распознавание QR-кода и посадка | ✔ | ✔ | ✔ |
| Распознавание и падение объектов | ✔ | ✔ | ✔ |
| Одновременное картографирование и обход препятствий | ✔ | ✔ | ✔ |
| 3D LiDAR-картирование и позиционирование | ✔ | ✔ | ✔ |
| Распознавание объектов на основе YOLO | ✘ | ✔ | ✔ |
| Распознавание и отслеживание объектов | ✘ | ✔ | ✔ |
| Пульт дистанционного управления 4G | ✘ | ✘ | ✔ |
В пакет включено
Базовая конфигурация
- Рамка: Рама из углеродного волокна F290
- Двигатели: 4× T-мотор F100 Kv1100
- ЕСК: 4× FlyFun T-rex 5 45A
- Пропеллеры: 4×7-дюймовых трехлопастных пропеллера
- Контроллер полета: Pixhawk6mini
- Аккумулятор: стандартная батарея 6S 6000 мАч
- Зарядное устройство: Зарядное устройство для аккумулятора 6S
- Бортовой компьютер: Jetson Orin Nano 8G + модуль WIFI
- SSD: 256G
- ЛиДАР: Ливокс МИД360
- Камера: USB-камера с широкоугольным объективом 150°
- Пульт дистанционного управления: Cloud T10 (включает приемник данных)
Дополнительная конфигурация: D435
Включает в себя все компоненты из Базовая конфигурация, плюс:
- Камера с двумя объективами: Д435
Дополнительная конфигурация: D435 + модуль 4G
Включает в себя все компоненты из Базовый Конфигурация, плюс:
- Камера с двумя объективами: Д435
- Модуль 4G
Подробности
Программируемый дрон S2-F290
- ✔ Техническая поддержка, беспроблемное послепродажное обслуживание
- ✔ Предоставляет примеры соревнований, настраиваемые
- ✔ Мобильная наземная станция с китайским/английским языком
- ✔ Высокая стабильность, высокая производительность
- ✔ В помещении/на открытом воздухе
S2-F290 — это современный беспилотник, созданный специально для гонок дронов, специализирующийся на исследованиях и инновациях.Созданный с целью объединения передовых технологий и неограниченного творчества, он способен адаптироваться к различным сложным условиям, делая воздушные исследования более доступными и эффективными.
Этот дрон отличается компактным дизайном и огромной мощностью. Он предлагает множество примеров соревнований, позволяя пользователям быстро освоить и оптимизировать его производительность. Оснащенный специальной китайской/английской мобильной наземной станцией, он значительно повышает удобство эксплуатации дрона. Кроме того, он предоставляет конкурентоспособные объяснения исходного кода и настраиваемость, чтобы гарантировать, что пользователи могут достичь желаемых функций в кратчайшие сроки, превосходя в конкурентных сценариях.

Удовлетворение потребностей в развитии / конкуренции / исследованиях
| Категория | Подробности |
|---|---|
| Базовые знания ROS | - Дистанционное управление |
| - Связь между контроллером полета и бортовым компьютером | |
| Основные функции | - Планирование маршрута |
| - Распознавание и позиционирование QR-кода | |
| - Автономный патруль вне борта | |
| Расширенные функции | - Распознавание QR-кода для посадки |
| - Распознавание и отбрасывание объектов | |
| - Одновременное картографирование и обход препятствий | |
| - 3D LiDAR-картирование и позиционирование | |
| - Распознавание объектов на основе YOLO | |
| - Передача видео через Интернет | |
| - Формирование полетов на открытом воздухе | |
| - Совместное формирование «Земля-Воздух» | |
| Дополнительные функции камеры D435 | - Визуальное позиционирование VINS |
| - Распознавание и отслеживание объектов на основе YOLO | |
| Дополнительные функции связи 4G | - Пульт дистанционного управления 4G |
Автономное предотвращение препятствий, комплексное обеспечение безопасности
Используя 3D LiDAR для автономного обхода препятствий, дрон сочетает глобальное планирование маршрута с локальным динамическим обходом препятствий для точного обнаружения препятствий со всех направлений. Он поддерживает автоматическую остановку, а также непрерывный полет, что позволяет гибко обходить объекты по маршруту полета, обеспечивая более безопасный полет.

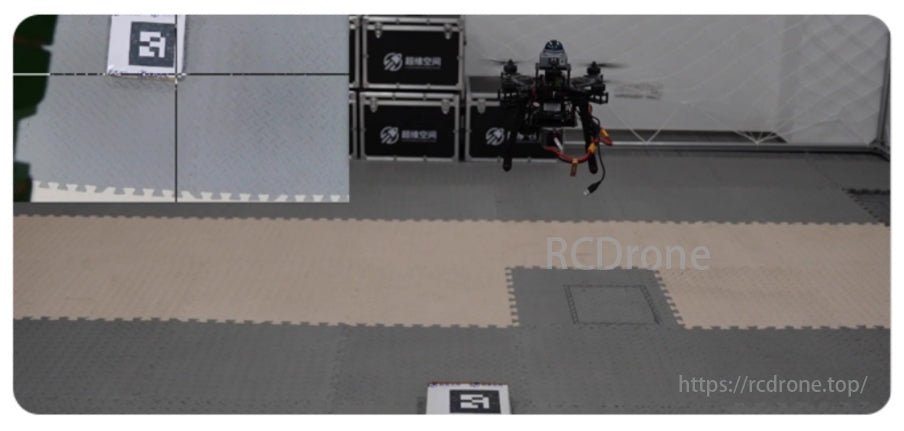
Распознавание и посадка QR-кода
Дрон активирует камеру и модуль распознавания QR-кода для получения информации о местоположении QR-кода в реальном времени. Во время спуска дрон динамически корректирует свое положение, обеспечивая точное выравнивание с полем зрения камеры, прежде чем приступить к посадке.
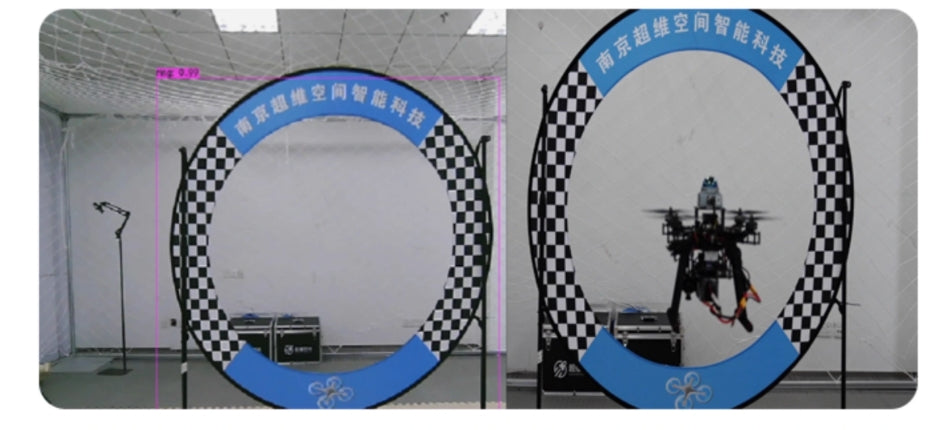
Распознавание объектов YOLO
Дрон использует YOLOv8 для распознавания объектов, получая позиционную информацию о круглой рамке в реальном времени. Он автономно регулирует свое положение и перемещается по круглой рамке.
Полеты в открытом строю
В дроне используется технология формирования роя, позволяющая скоординированно управлять несколькими дронами для выполнения полета в строю.Используя передовые алгоритмы связи и совместного управления, он обеспечивает связь и обмен информацией в реальном времени между дронами, синхронизируя их движения и положения для формирования плотного строя.

Совместное формирование «Земля-Воздух»
Эта платформа поддерживает совместную формацию между наземными и воздушными дронами. Используя локальную сеть с топологическими структурами для взаимодействия устройств, она использует связь UDP и пользовательские протоколы для обеспечения высокоскоростной и стабильной связи. Благодаря управлению PID она достигает синхронизированного следования между основным дроном и несколькими подчиненными дронами, обеспечивая стабильность формации и эффективность работы.

Пример конкурса
Предоставляет эксклюзивные сценарии соревнований с пошаговыми инструкциями, позволяя участникам легко адаптироваться к различным типам соревнований.



Характеристики программируемого дрона S2-F290
Высокая эффективность затрат
- Разработан для новичков, чтобы сократить время обучения и облегчить освоение управления дроном.
- Доступная цена делает его идеальным учебным дроном для студентов и энтузиастов.
Высокая стабильность
- Испытано в различных экстремальных условиях в течение трех лет.
- Оснащен рамой из углеродного волокна толщиной 3 мм для повышенной прочности и устойчивости.
- Позволяет пользователям получить признание в своем первом опыте участия в соревнованиях.
Расширяемость
- Поддерживает расширенную настройку для различных приложений.
- Совместимость с различными компонентами расширения для постоянного улучшения производительности и функциональности дрона.
Послепродажное обслуживание без проблем
- Профессиональная команда, обеспечивающая всестороннее руководство и поддержку.
- Предлагает бесплатный ремонт аппаратных повреждений, вызванных ошибками в эксплуатации, в течение гарантийного периода (за исключением аксессуаров и аккумуляторов).
Настраиваемый
- Обеспечивает поддержку эксклюзивной разработки в ROS и QGC.
- Поддерживает высокую точность картографирования и навигации — более 98%.
- Совместимость с модулями RTK/GPS, логотипами и различными уникальными функциями.

Конфигурация наземной станции
Использование контроллера полета Pixhawk 2.4.8
Этот контроллер полета, оснащенный новейшим стандартным 32-разрядным процессором STM32F427 и барометром MS5611, предлагает множество интерфейсов и высокую экономичность в качестве варианта с открытым исходным кодом.
1. Эксклюзивная, глубоко адаптированная наземная станция QGC
- Достигнут уровень локализации на китайский язык более 98%.
- Поддерживает расширенные функции, такие как NTRIP.
2. Мобильная наземная станция QGC
- Предоставляет мобильную версию наземной станции QGC, обеспечивающую бесперебойную работу со смартфона.
3. Прямое подключение Wi-Fi или 4G
- Просто подключитесь по Wi-Fi и управляйте устройством с помощью смартфона или компьютера.
- Примечание: Система «ezuav» показывает, что она подключена к устройству, но не может предоставить доступ в Интернет.

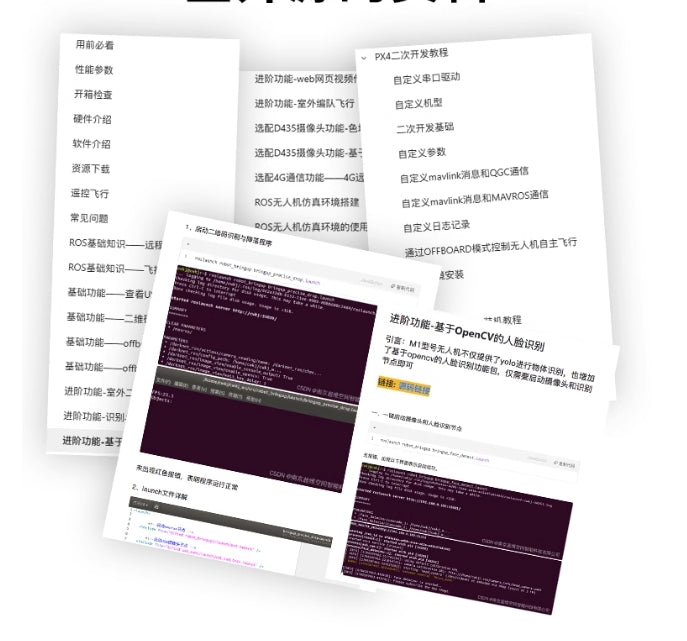
Подробные руководства и полностью открытые ресурсы
- Очень подробные руководства по использованию, охватывающие все аспекты функциональности дрона S2-F290.
- Полностью открытые материалы, в том числе:
- Вводные руководства по программному обеспечению и его установке.
- Учебные пособия по базовым и расширенным функциям, таким как распознавание объектов на основе OpenCV, 3D-картографирование и автономный полет вне борта.
- Индивидуальные инструкции по разработке для связи PX4 и MAVLink.
- Часто задаваемые вопросы по устранению неполадок, настройка среды ROS и этапы эксплуатации.