









Модуль сустава робота SteadyWin GIM3510-8, планетарный редуктор 8:1, CAN-драйвер, двойной энкодер, 24В 60Вт
Модуль сустава робота SteadyWin GIM3510-8, планетарный редуктор 8:1, CAN-драйвер, двойной энкодер, 24В 60Вт
SteadyWin
Не удалось загрузить сведения о доступности самовывоза
Обзор
Модуль малого роботизированного сустава SteadyWin GIM3510-8 является интегрированным приводом роботизированного сустава, который сочетает в себе мотор Aloha, планетарный редуктор 8:1, встроенный драйвер связи и двойные энкодеры в компактном цилиндрическом корпусе. С номинальным напряжением 24 В (широкий диапазон 12–40 В или 12–48 В в зависимости от платы драйвера), высокой выходной скоростью до 564,6 об/мин после редукции и коммуникацией по шине CAN, он предназначен для подвижных гуманоидных роботов, роботизированных рук, мобильных платформ и других многосистемных систем, требующих точного замкнутого управления движением.
Ключевые особенности
- Высокоскоростное планетарное редуцирование: планетарный редуктор 8:1 с номинальной выходной скоростью 535,5 об/мин и максимальной 564,6 об/мин (GDZ34), подходит для быстро движущихся суставов.
- Широкий диапазон напряжения: Номинальная работа при 24 В с диапазоном входного напряжения 12–40 В (GDZ34) или 12–48 В (GDS34) для гибкого проектирования силовой системы.
- Эффективный выходной крутящий момент: Постоянная крутящего момента до 0.32 N.m/A с номинальным крутящим моментом до 1.68 N.m и пиковым крутящим моментом до 6.02 N.m, обеспечивая эффективную передачу мощности для легких и средних роботизированных суставов.
- Интегрированный драйвер с CAN-шиной: Встроенная плата драйвера (GDS34 или GDZ34) поддерживает CAN-связь для упрощения проводки и сетевого управления.
- Двойная обратная связь от энкодера: 14-битный энкодер на драйвере и второй энкодер на выходном валу для точной обратной связи по положению и скорости.
- Компактная структура: Всего 46 мм внешний диаметр с общей длиной от 46.5 мм (без драйвера) до 51.5 мм (с драйвером), что позволяет создавать плотные многосоставные компоновки.
- Экологическая устойчивость: Защита IP54, рабочая температура от -20°C до +80°C и уровень шума ниже 60 дБ.
- Функции защиты: Защита от перегрева, перенапряжения и перегрузки помогает поддерживать безопасную и надежную работу в системах с непрерывным режимом работы.
- Механическая прочность: Поддерживает осевую нагрузку до 75 Н и радиальную нагрузку до 300 Н на выходном валу, с backlash редуктора 15 угловых минут.
- Опция индивидуального тормоза: Поддерживает интеграцию индивидуального тормоза для суставов, которые требуют удерживающего момента при отсутствии питания.
Для технической поддержки, настройки или вопросов по интеграции модуля малых роботизированных суставов GIM3510-8, пожалуйста, свяжитесь с https://rcdrone.top/ или напишите на электронную почту [email protected].
Применения
- Человекообразные роботы
- Роботизированные руки
- Экзоскелеты
- Четвероногие роботы
- AGV-автомобили
- Роботы ARU
Технические характеристики
| Параметр | Единица | GIM3510-8 + GDS34 (SDC101) | GIM3510-8 + GDZ34 |
|---|---|---|---|
| Модель | - | GIM3510-8 | GIM3510-8 |
| Модель драйверной платы | - | GDS34 (SDC101) | GDZ34 |
| Номинальное напряжение | В | 24 | 24 |
| Диапазон напряжения | В | 12–48 | 12–40 |
| Номинальная мощность | Вт | 98 | 60 |
| Номинальный крутящий момент | N.m | 1.68 | 1.00 |
| Пиковый крутящий момент | N.m | 3.41 | 6.02 |
| Номинальная скорость после редукции | об/мин | 430 | 535.5 |
| Максимальная скорость после редукции | об/мин | 529 | 564.6 |
| Номинальный ток | A | 4.1 | 2.5 |
| Пиковый ток | A | 8.30 | 25.30 |
| Сопротивление фазы | Ом | 0.48 | 0.48 |
| Индуктивность фазы | мГн | 0.31 | 0.31 |
| Константа скорости | об/мин/В | 22.04 | 23.53 |
| Константа крутящего момента | N.m/A | 0.44 | 0.32 |
| Количество пар полюсов | Пары | 7 | 7 |
| Передаточное отношение | - | 8:1 | 8:1 |
| Тип редуктора | - | Планетарный | Планетарный |
| Материал редуктора | - | ALU | ALU |
| Зазор редуктора | аркмин | 15 | 15 |
| Вес мотора без драйвера | г | 247.6 | 247.6 |
| Вес мотора с драйвером | г | 259.6 | 259.6 |
| Размер без драйвера (диаметр x длина) | мм | Ø46 x 46.5 | Ø46 x 46.5 |
| Размер с драйвером (диаметр x длина) | мм | Ø46 x 51.5 | Ø46 x 51.5 |
| Максимальная осевая нагрузка | N | 75 | 75 |
| Максимальная радиальная нагрузка | N | 300 | 300 |
| Шум | dB | <60 | <60 |
| Связь | - | CAN | CAN |
| Второй энкодер на выходном валу | - | ДА | ДА |
| Степень защиты | - | IP54 | IP54 |
| Рабочая температура | °C | -20 до +80 | -20 до +80 |
| Разрешение энкодера (энкодер драйвера) | бит | 14 | 14 |
| Поддержка отдельного энкодера | - | НЕТ | НЕТ |
| Кастомная поддержка тормоза | - | ДА | ДА |
Руководства
- SteadyWin_GIM3510-8_Схема_установки.stp
- GlM3510-8_чертеж_установки.pdf
- Gl3510-8_с_тормозом_чертеж_установки.pdf
Детали

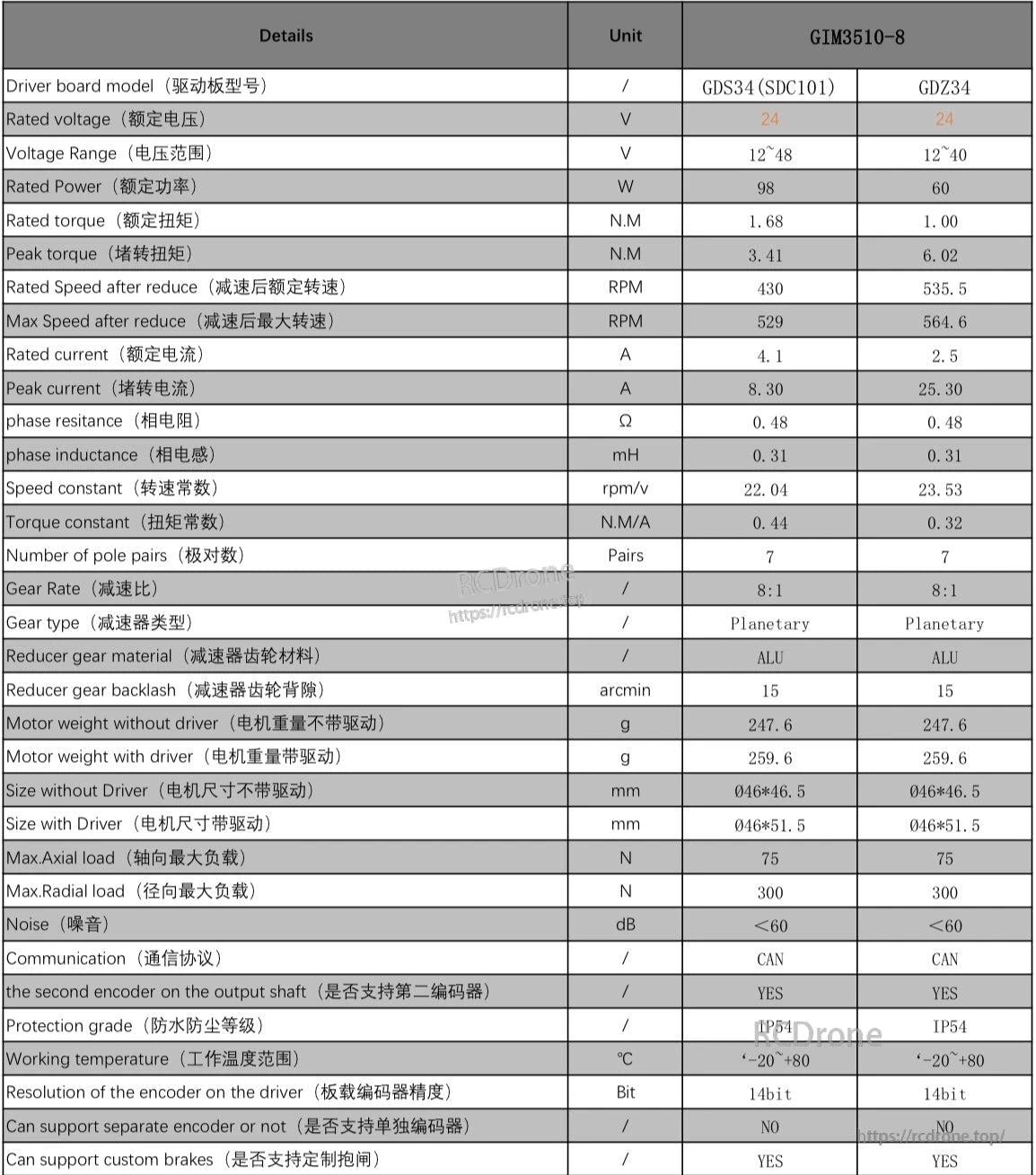
Спецификации суставов робота GIM3510-8 сравнивают платы управления GDS34 и GDZ34. Ключевые параметры включают напряжение, мощность, крутящий момент, скорость, ток, вес, размер, грузоподъемность, шум, связь, энкодер, степень защиты, диапазон температур и поддержку индивидуального тормоза.









