Высокоточный внешний компас-магнитометр CUAV RM3100 C-Compass для Pixhawk PX4 ArduPilot DroneCAN/UAVCAN
Высокоточный внешний компас-магнитометр CUAV RM3100 C-Compass для Pixhawk PX4 ArduPilot DroneCAN/UAVCAN
CUAV
Обычная цена
$203.00 USD
Обычная цена
Цена со скидкой
$203.00 USD
Цена за единицу
за
Налоги включены.
Стоимость доставки рассчитывается при оформлении заказа.
Не удалось загрузить сведения о доступности самовывоза
Обзор
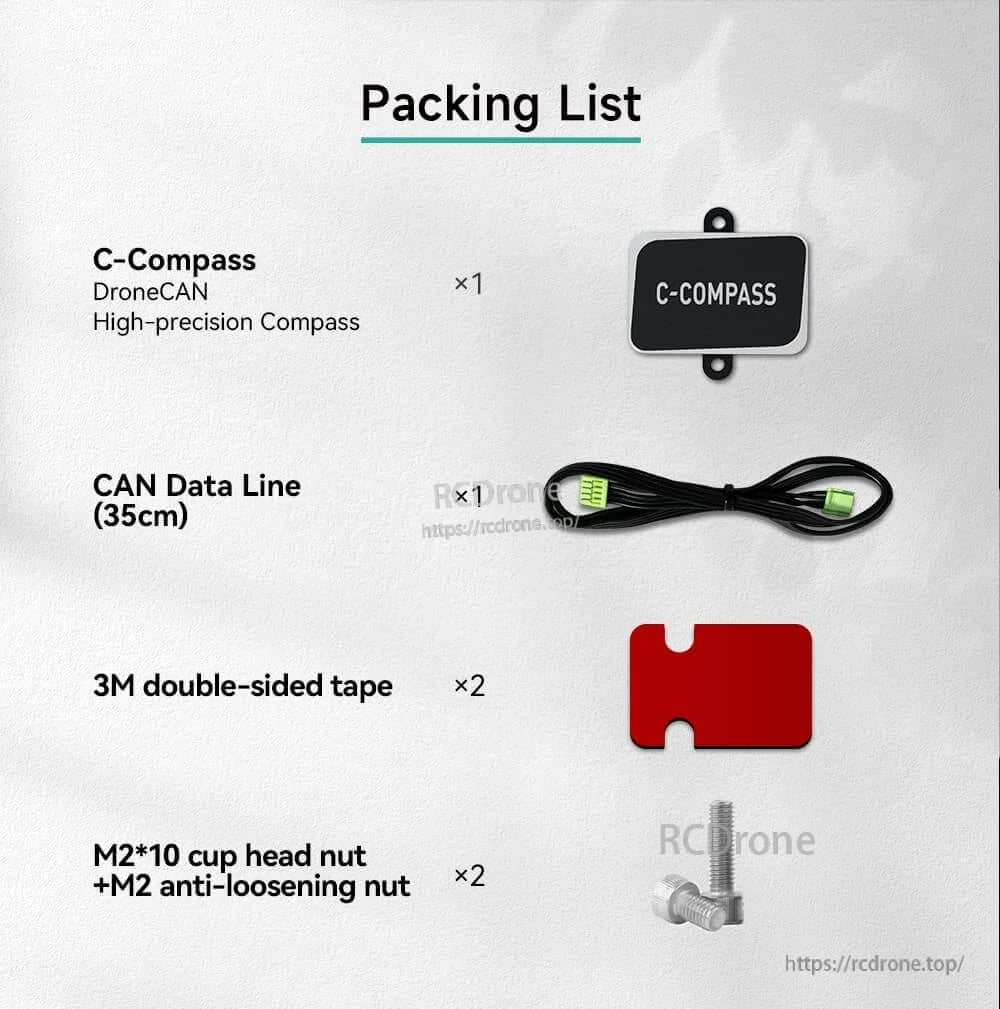
Внешний компас CUAV C-Compass является высокоточным магнитометром, основанным на магнитном сенсоре RM3100 для экосистем контроллеров Pixhawk и PX4. Он использует коммуникацию по шине DroneCAN/UAVCAN и совместим с платформами ArduPilot и PX4, с встроенным процессором STM32F4, работающим на программной архитектуре CUAV M4C для стабильного измерения направления в электрически шумных конструкциях.
Ключевые особенности
- Магнитный сенсор RM3100
- Встроенный процессор STM32F4
- Собственная архитектура программного обеспечения M4C от CUAV
- Совместимость с платформой программного обеспечения для полетов APM/PX4
- Поддержка протокола DroneCAN/UAVCAN
- Разработан для низкого уровня шума и защиты от помех при использовании в качестве внешнего компаса
Технические характеристики
| MCU | STM32F412 (32-битный Arm Cortex-M4, 100 МГц, 512 КБ FLASH, 256 КБ RAM) |
| Сенсор | RM3100 |
| Архитектура программного обеспечения | CUAV M4C |
| Протокол | DroneCAN/UAVCAN |
| Скорость передачи данных | 2 Мбит |
| Частота обновления | 80 Гц |
| Шум | 15 нТ |
| Точность | 0.25° (эффективное значение) |
| Точность повторения | 0.05° |
| Разрешение | 0.01° |
| Чувствительность | 13nT |
| Диапазон | -800 μT до +800 μT |
| Тип контроллера | PX4/ArduPilot (CUAV/Pixhawk и др.) |
| Интерфейс | GHR-04V-S |
| Рабочее напряжение | 4.75-5.3V |
| Рабочая температура | -20 до 80°C |
| Рабочая влажность | 5% до 95% (без конденсации) |
| Материал корпуса | Алюминиевый сплав |
| Размер | 31.5 x 31.0 x 14.0мм |
| Вес | 13г |
| Указанный вес | 0.5 кг |
| Указанные размеры | 20 x 10 x 10 см |
Опции
- C-Компас * 3 шт
- C-Компас & NEO 3 GPS / Набор
- C-Компас & NEO 3 Pro GPS / Набор
- C-Компас & NEO 3X GPS / Набор
Применения
- Внешний компас/определение направления для сборок автопилота Pixhawk и CUAV, работающих на PX4 или ArduPilot
- Улучшение стабильности магнитных измерений путем установки вдали от источников помех (кабели, батареи, моторы)
Для вопросов интеграции и совместимости (настройка DroneCAN/UAVCAN, параметры ArduPilot/PX4, проводка), свяжитесь с [email protected] or посетите https://rcdrone.top/ .
Related Collections