Исследовательский дрон SU17 — разработка промышленного дрона PX4 с открытым исходным кодом, с MID-360 LiDAR, четырьмя камерами SLAM, EGO-Swarm
Исследовательский дрон SU17 — разработка промышленного дрона PX4 с открытым исходным кодом, с MID-360 LiDAR, четырьмя камерами SLAM, EGO-Swarm
RCDrone
Не удалось загрузить сведения о доступности самовывоза
Обзор
Исследовательский дрон SU17 — это высокопроизводительный квадрокоптер с Аккумулятор 6000 мАч, MID-360 LiDAR для 3D-картографирования, система SLAM с четырьмя камерами для точной локализации и интегрированного GPS+ГЛОНАСС позиционирование. При взлетном весе 2,3 кг и а Грузоподъемность 200 г, он предлагает 21 минута полета в режиме визуального позиционирования. Работает на программном обеспечении Prometheus, поддерживает распознавание целей, планирование пути и автономную навигацию, что делает его промышленного класса решение для исследований и инноваций.
Параметры оборудования
Самолеты
| Параметр | Описание |
|---|---|
| Тип самолета | Квадрокоптер |
| Взлетный вес (приблизительный) | 2,3 кг (с защитным чехлом и аккумулятором) |
| Расстояние по диагонали | 320 мм |
| Размеры | Длина: 442 мм, Ширина: 388 мм, Высота: 174 мм (без защитной крышки) |
| Максимальная полезная нагрузка | 200 г |
| Время полета в режиме зависания | Приблизительно 13 мин (при зависании на 100%, не ниже 0%), визуальное позиционирование: 21 мин |
| Точность зависания | GPS: по вертикали ±1,5 м, по горизонтали ±2,0 м |
| 3D LiDAR SLAM: Вертикальный ±0,08 м, Горизонтальный ±0,08 м | |
| 4-камерный визуальный SLAM: Вертикальный ±0,05 м, Горизонтальный ±0,05 м | |
| Уровень сопротивления ветру | Уровень 4 |
| Рабочая температура | -10°С до 40°С |
| Основной чип MCU | STM32H743 |
| ИДУ | ICM42688/BMI088 |
| Барометр | MS5611 |
| Компас | QMC5883L |
| Интерфейс | USB-порт типа C |
Бортовой компьютер
| Параметр | Описание |
|---|---|
| Процессор | Intel Core i5-8365U |
| Емкость памяти | 8ГБ |
| Частота памяти | LPDDR3@2133MHz |
| Хранилище | 256 ГБ NVMe SSD |
| Сетевой порт | Байду Аполлон Ethernet X2, 12V@3A power поставка, поддерживает IEEE 1588-2008 (PTP v2) |
| Последовательный порт | Последовательный порт TTL X2, 5 В/3.3V@500mA poweг поставка |
| USB | Тип-C X2 (1x USB2.0, 1x USB3.0) |
| HDMI | HDMI 1.4 |
Аккумуляторная батарея
| Параметр | Описание |
|---|---|
| Модель | СУ17-Л |
| Тип батареи | Литий-полимерная батарея высокого давления |
| Номинальное напряжение | 26,4 В (макс.), 21 В (мин.) |
| Напряжение хранения | 22,8 В (типичное) |
| Номинальная мощность | 6000 мАч |
| Масса | 680 г |
| Размеры | Длина: 85,2 мм, ширина: 86.5 мм, Высота: 135 мм |
Пульт дистанционного управления
| Параметр | Описание |
|---|---|
| Модель | QE-2 |
| Каналы | 8 |
| Мощность передачи | 18~20 дБм |
| Масса | 294,1 г |
Карданный подвес
| Параметр | Описание |
|---|---|
| Управляемый угол | -90° ~ 30° (ось наклона) |
| Протокол потоковой передачи | RTSP (стандартный) |
| Формат кодировки | H.264 |
| Разрешение | 1080P @ 25 кадров в секунду |
| Диагональное поле зрения (D) | 120° |
| Вертикальное поле зрения (V) | 54° |
| Горизонтальное поле зрения (H) | 95° |
Передача изображения
| Параметр | Описание |
|---|---|
| Рабочая частота | 2.4ГГц |
| Мощность передачи | 18 дБм |
| Дальность связи | 3 км (без помех и препятствий) |
| Диапазон изображения | 1 км (минимальные помехи, без препятствий) |
| Максимальная пропускная способность | 40 Мбит/с |
Четырехкратная камера глубины
| Параметр | Описание |
|---|---|
| Ускоритель Видения | Intel Movidius Myriad X ВПУ |
| Максимальное разрешение | 1296x816 |
| Максимальная частота кадров | 1280x800 @ 120 кадров в секунду |
| Тип затвора | Глобальный затвор |
| Формат кодировки | 8/10-битный одиночный поток |
| Поле зрения | Угол обзора по диагонали 150°, по горизонтали 127,4°, по вертикали 79,7° |
| Количество датчиков | 4 (2 спереди + 2 сзади) |
| ИДУ | БМИ270 |
ГНСС
| Параметр | Описание |
|---|---|
| Горизонтальная точность | КВО 1,5 м (с SBAS) |
| Точность скорости | 0,05 м/с |
| Режим работы | GPS + ГЛОНАСС + BDS + GALILEO + SBAS + QZSS |
Зарядное устройство
| Параметр | Описание |
|---|---|
| Модель | ЛК150-2640500 |
| Входное напряжение переменного тока | 100В ~ 240В |
| Входное напряжение постоянного тока | 26.4В |
| Масса | 460 г |
| Ток зарядки | 5А |
3D-лидар
| Параметр | Описание |
|---|---|
| Модель | MID-360 |
| Длина волны лазера | 905 нм |
| Диапазон измерения | 40 м при 10% отражательной способности |
| Поле зрения | Горизонтально 360°, Вертикально -7° ~ 52° |
| Минимальный диапазон | 0,1 м |
| Частота точек | 10 Гц (типично) |
| Точка выхода | 200 000 точек/с |
| Интерфейс данных | 100 BASE-TX Ethernet |
| Синхронизация данных | IEEE 1588-2008 (PTP v2), GPS |
| Встроенный ИИБ | ICM40609 |
| Напряжение питания | 7~27В |
| Размеры | 65 мм (Ш) x 65 мм (Г) x 60 мм (В) |
| Масса | 115 г |
| Рабочая температура | -20°С ~ 55°С |
Параметры программного обеспечения
Бортовой компьютер
| Параметр | Описание |
|---|---|
| Модель | Intel Core i5-8365U |
| Система | Убунту 20.04 |
| Имя пользователя | амов |
| Пароль | амов |
| РОС | ноэтический |
| OpenCV | 4.7.0 |
| Система визуального позиционирования | BSA_SLAM V1 |
Программное обеспечение Прометей
| Параметр | Описание |
|---|---|
| Версия | версия 2.0 |
| Система PrometheusGroundStation | v1.24.11.27 (финальная версия на основе записи релиза Wiki) |
Подробности
SU17 Исследовательское издание
Исследовательский дрон промышленного уровня качества
- Дополнительный 3D LiDAR: Обеспечивает картографирование, позиционирование и навигацию, избегая препятствий.
- Программное обеспечение для автономных дронов Prometheus: Множество демонстраций для быстрого освоения управления дроном.
- Промышленная летная платформа: Стабильный и открытый, устанавливающий новый стандарт производительности исследовательских дронов.

Основные характеристики
Исследование SU17 Платформа для разработки дронов (называемый SU17) имеет интегрированную конструкцию, включающую контроллеры полета, бортовые компьютеры, модули SLAM с четырьмя камерами, облачные камеры и модули передачи изображений для высокоуровневой интеграции, что значительно повышает стабильность и надежность оборудования. Оснащенный программным обеспечением автономного дрона Prometheus, SU17 поддерживает такие функции, как распознавание целей, отслеживание и планирование пути для различных сценариев управления полетом.
Он опционально интегрирует MID-360 3D LiDAR в сочетании с алгоритмом FAST-LIO для достижения 3D LiDAR SLAM, предлагая точную информацию об окружающей среде и позиционировании. В сочетании с алгоритмом планирования пути EGO-Swarm он обеспечивает эффективное 3D-картографирование в реальном времени и обход препятствий в сложных условиях.




Программная система Prometheus V2
Платформа разработки построена на основе ROS и Prometheus с открытым исходным кодом, предлагая богатые функциональные возможности и обширные API вторичной разработки для эффективного перепрограммирования. Она обеспечивает доступ к информации о позиционировании, режимах полета, состоянии батареи, данным IMU и другим интерфейсам данных о состоянии дрона и датчиках, а также к интерфейсам управления положением, скоростью, ускорением и ориентацией.
Кроме того, он включает примеры использования для связанных API. Кроме того, дрон имеет функции проверки безопасности для полетных операций (анти-краш), что позволяет автоматически снижаться в нештатных условиях, снижая риск сбоев и обеспечивая более безопасный процесс разработки.

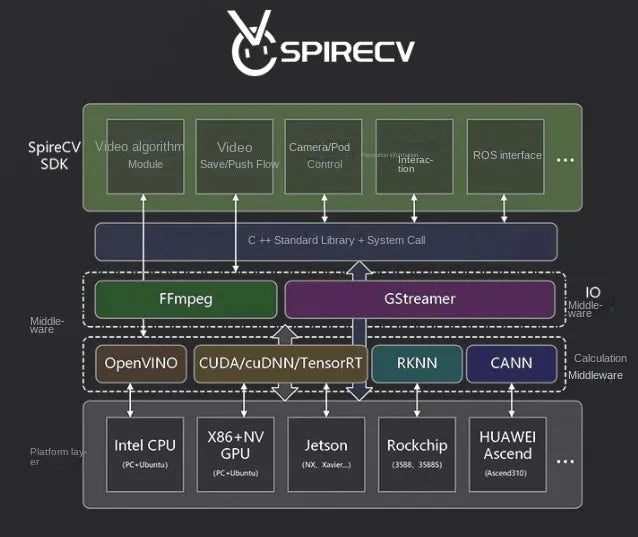
Библиотека SpireCV Vision
SpireCV Vision Library — это SDK для обработки изображений в реальном времени, специально разработанный для интеллектуальных систем БПЛА. Он обеспечивает такие функции, как управление подвесом и камерой, хранение и потоковая передача видео, обнаружение, распознавание и отслеживание целей.
Этот SDK нацелен на обеспечение высокой производительности, надежности и оптимизированного интерфейса для разработчиков интеллектуальных систем БПЛА. Благодаря многофункциональному решению для визуальной обработки он позволяет разработчикам эффективно реализовывать различные сложные приложения на основе зрения.
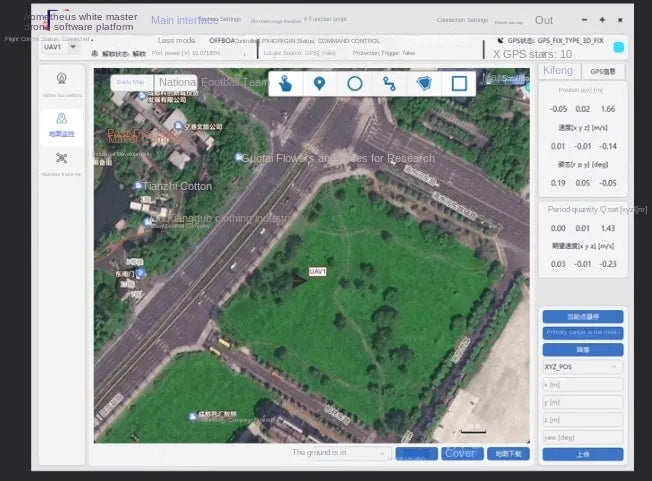
Наземная станция «Прометей»
Prometheus Ground Station — это интерфейс взаимодействия человека и дрона, разработанный на основе системы Prometheus, созданный с использованием технологии Qt. Он обеспечивает быстрое воспроизведение функций системы Prometheus, обеспечивая мониторинг в реальном времени и 3D-визуализацию данных о состоянии и управлении дронами.
Через наземную станцию пользователи могут выполнять такие команды, как взлет одним щелчком, зависание в текущей позиции, посадка и управление положением. Кроме того, система поддерживает пользовательские функциональные кнопки для запуска пользовательских сценариев или отправки пользовательских сообщений, что значительно повышает удобство, эффективность и масштабируемость пользовательских операций.
Мощное расширение
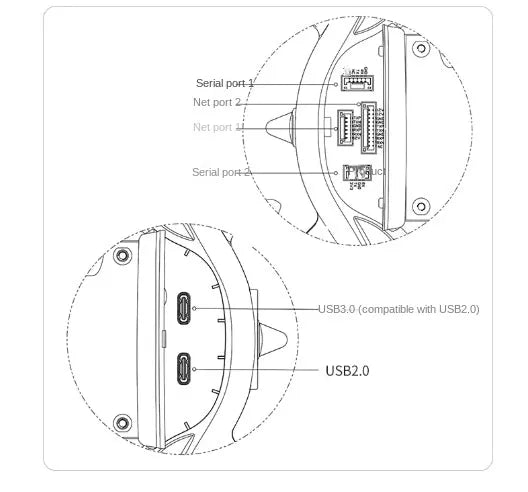
Порты аппаратного расширения
-
Последовательный порт 1
-
Последовательный порт 2
-
Сетевой порт 1
-
Сетевой порт 2
-
USB-порты:
- USB 3.0 (совместим с USB 2.0)
- USB 2.0
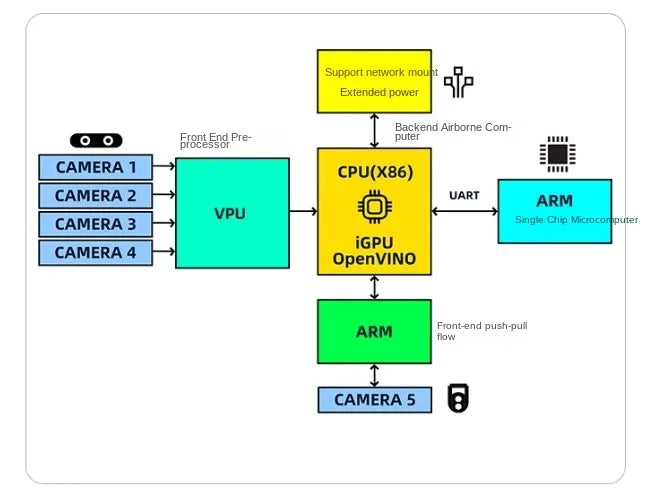
Аппаратная платформа
На изображении показана аппаратная архитектура дрона SU17, подчеркивающая интеграцию различных компонентов для расширенной обработки данных и управления системой:
-
Камеры (камеры 1-4):
Подключен к VPU (блок обработки изображений) для предварительной обработки на переднем крае. -
ВПУ:
Обрабатывает визуальные данные с нескольких камер и передает их в блоки обработки. -
ЦП (X86) с iGPU и OpenVINO:
Служит основным вычислительным блоком для обработки на внутреннем уровне, поддерживая возможности расширения с помощью сетевого подключения для повышения вычислительной мощности. -
Однокристальный микроконтроллер ARM:
Взаимодействует с ЦП через интерфейс UART для дополнительных функций управления. -
Конвейерная обработка на передней панели и камера 5:
Управляется специальным процессором ARM для дальнейшей оптимизации данных.
Эта структура объединяет несколько процессорных блоков, поддерживая анализ изображений в реальном времени, расширенные вычислительные задачи и бесперебойную связь между аппаратными компонентами. Она обеспечивает эффективную обработку сложных операций в приложениях для исследований и разработок.
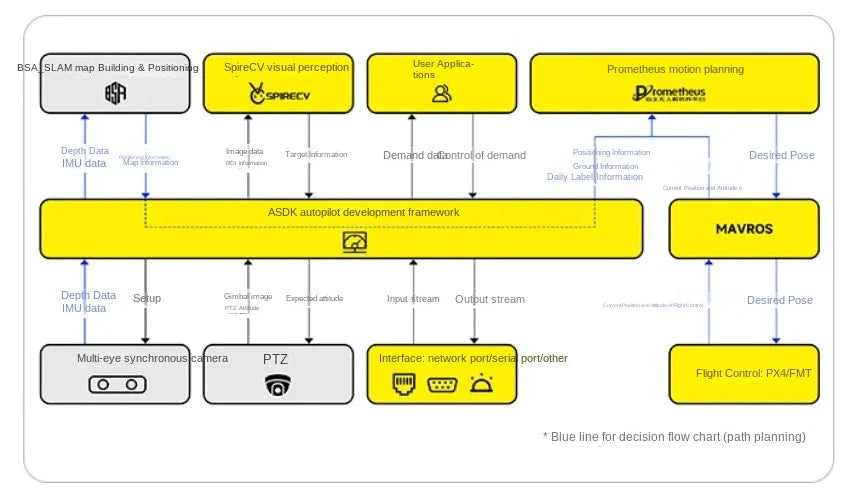
Программная структура
На схеме показана архитектура программного обеспечения дрона SU17, подчеркивающая интеграцию различных систем для обеспечения автономной работы:
-
BSA_SLAM (картографирование и локализация):
- Предоставляет данные пространственного картографирования и позиционирования.
- Объединяет входные данные датчиков глубины и IMU для точного восприятия окружающей среды.
-
SpireCV Vision Восприятие:
- Обрабатывает визуальные данные, включая обнаружение объектов, информацию о ROI и отслеживание целей.
-
Пользовательские приложения:
- Интерфейсы для пользовательских задач, таких как визуализация данных и ввод команд.
-
Планирование движения Prometheus:
- Осуществляет планирование траектории с использованием данных о местоположении, скорости и цели.
-
ASDK-фреймворк автономного вождения:
- Выполняет функции центрального уровня обработки, управляя потоком данных между датчиками, камерами, облачными модулями и внешними интерфейсами.
- Поддерживает несколько каналов ввода/вывода (например, сетевые порты, последовательные порты).
-
МАВРОС:
- Взаимодействует с системами управления полетом (PX4/FMT) для контроля состояния и положения полета.
-
Облачный модуль и мультисинхронные камеры:
- Интегрирует облачные данные для расширенной обработки.
- Синхронизирует визуальные входные данные для высокоточных операций.
Синие линии: Представляют пути принятия решений для планирования траектории.
Эта архитектура демонстрирует модульную, расширяемую конструкцию, обеспечивающую бесперебойную связь между различными аппаратными и программными компонентами для надежной работы дрона.
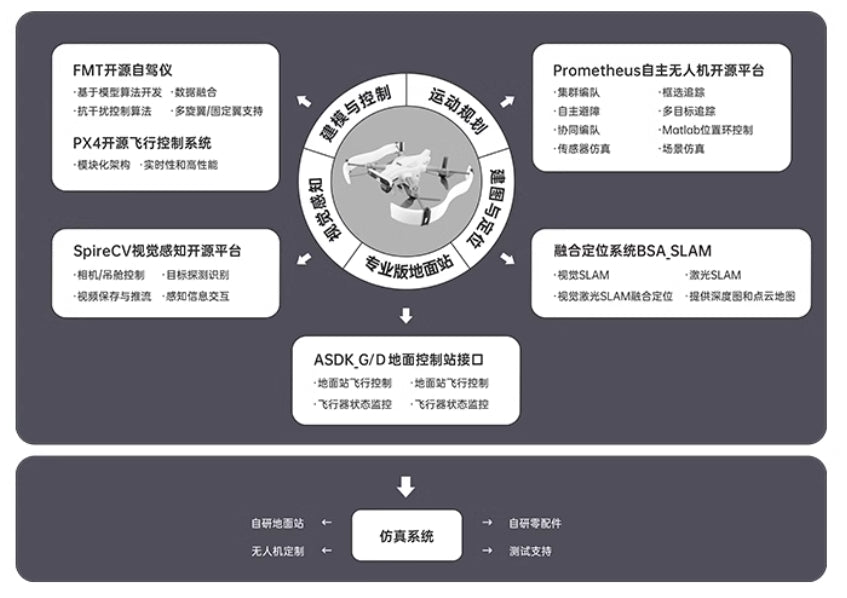
Интеллектуальная открытость: комплексное решение для систем БПЛА
На схеме представлена комплексная и открытая архитектура систем беспилотных летательных аппаратов, подчеркивающая модульность и интеграцию различных компонентов:
-
Основные компоненты:
- Автопилот FMT с открытым исходным кодом: Обеспечивает надежное управление полетом на основе модульной разработки, поддерживает разнообразные среды и интеграцию данных.
- Система управления полетом PX4: Обеспечивает стабильность и поддерживает расширенную модульную настройку.
- Платформа восприятия зрения SpireCV: Основное внимание уделяется обработке изображений, включая обнаружение объектов, отслеживание и потоковую передачу видео в реальном времени.
-
Ключевые рамки:
- Платформа автономного БПЛА «Прометей»: Включает управление несколькими дронами, планирование движения, совместную навигацию и моделирование реальных условий.
- Система BSA_SLAM: Сочетает SLAM на основе машинного зрения и SLAM на основе LiDAR для точного позиционирования и картирования.
- Интерфейс управления наземной станцией ASDK G/D: Обеспечивает бесперебойную связь между наземными станциями и БПЛА для мониторинга и корректировки в реальном времени.
-
Интеграция рабочего процесса:
- Освещает такие процессы, как планирование движения, картографирование окружающей среды и автономная навигация.
- Интеграция с профессиональными наземными станциями для управления траекторией, обхода препятствий и управления данными в реальном времени.
-
Поддержка моделирования:
- Включает в себя систему моделирования для тестирования автономных миссий, управления БПЛА и проверки компонентов.
Эта система демонстрирует передовое решение для разработки автономных БПЛА с масштабируемыми возможностями для исследований, применения и испытаний в различных сценариях.
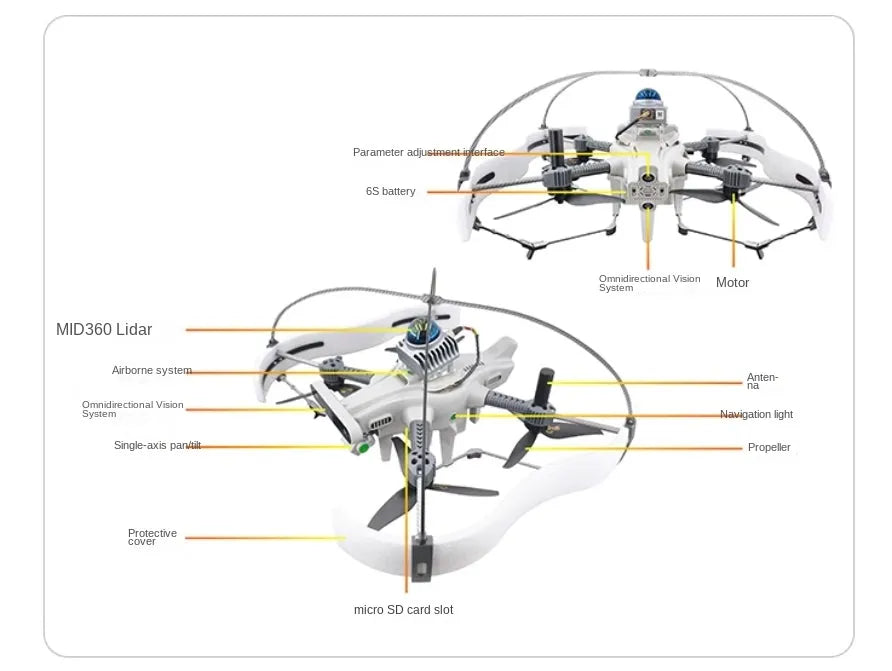
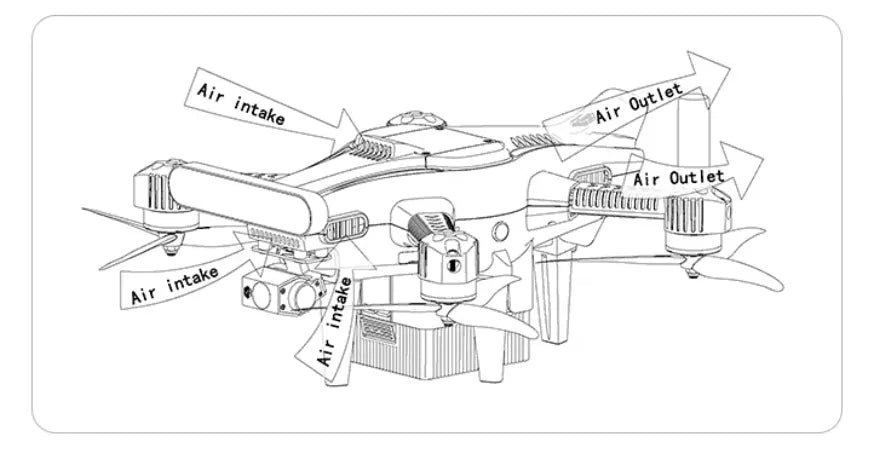
структурные компоненты исследовательского дрона SU17, подчеркивающие его устойчивость и передовой дизайн. Основные характеристики включают MID360 Лидар для точного картирования, всенаправленная система видения для всестороннего восприятия окружающей среды, одноосевой карданный подвес для стабилизированного изображения и надежного 6S аккумулятор для расширенной мощности. Другие важные компоненты включают система пропеллера, антенна, навигационные огни, и слот для карты памяти micro SD для хранения данных. В конструкцию интегрировано передовое оборудование, обеспечивающее надежность и высокую производительность для различных исследовательских приложений.
Related Collections