






Интегрированный шарнирный привод Ti5 Robot CRA-RI100-142-PRO-XX, 1 кВт, 24–48 В, до 169 Н·м, IP65, CAN/EtherCAT, 51–161:1, дополнительный тормоз
Интегрированный шарнирный привод Ti5 Robot CRA-RI100-142-PRO-XX, 1 кВт, 24–48 В, до 169 Н·м, IP65, CAN/EtherCAT, 51–161:1, дополнительный тормоз
Ti5 Robot
Не удалось загрузить сведения о доступности самовывоза
Обзор
The Робот Ti5 CRA-RI100-142-PRO-XX Компактный интегрированный привод, сочетающий в себе серводвигатель с постоянными магнитами, прецизионный редуктор, энкодер и герметичный корпус. Он входит в серию PRO, разработанную для гуманоиды, экзоскелеты, коботы, роботы и промышленные механизмы, показывая высокая плотность крутящего момента, низкий уровень шума и защита IP65. Интерфейс контроллера можно выбрать (CAN или EtherCAT), обратная связь может быть одинарный или двойной кодер, и стояночный тормоз доступен как опция. 32 мм полый вал упрощает прокладку кабеля или пневматической системы через соединение.
Ключевые особенности
-
Номинальный крутящий момент до 169 Н·м (зависит от передаточного числа) с плавным выходом без зубцов
-
Герметичный IP65 корпус для пыле- и влагозащищенной работы
-
24–48 В постоянного тока, 1 кВт класса ПМСМ с высоким КПД
-
CAN или EtherCAT полевая шина; одинарный/двойной инкрементальный энкодер (17-бит)
-
Дополнительный удерживающий тормоз (-B) для безопасного позиционирования и удержания в выключенном состоянии
-
Выходной полый вал (Ø32 мм); подходит для сквозной прокладки кабелей
-
Долгая жизнь &усилитель; высокая надежность; низкий уровень шума, высокая точность
-
Предварительно смонтированная проводка (5 м) для быстрой интеграции
Технические характеристики
Электрические &и общее
-
Модель: CRA-RI100-142-PRO-XX (-B = с тормозом)
-
Тип двигателя: Синхронный с постоянными магнитами
-
Номинальная мощность: 1000 Вт
-
Напряжение питания: 24–48 В постоянного тока
-
Номинальный ток: 15,8 А | Максимальный постоянный ток: 16,9 А
-
Фазовое сопротивление: 0,12 Ом | Индуктивность: 0,3 мГн
-
Пары полюсов: 8 | Постоянная крутящего момента: 0,175 Н·м/А
-
Кодер: Инкрементный, 17-бит, одинарный или двойной
-
Автобус: МОЖЕТ (выбирается EtherCAT)
-
Защита: IP65
-
Диапазон вращения: 60°
-
Сквозное отверстие: Ø32 мм
-
Рабочая среда: до 60 °С
-
Длина кабеля: 5 м
Механический конверт
-
Без тормоза: Длина 95,7 ± 0,5 мм, масса 3,8 кг, инерция ротора 3601 г·см²
-
С тормозом (-B): Длина 115,7 ± 0,5 мм, масса 4,5 кг, инерция ротора 4237 г·см²
Примечание: «100-142» в названии модели обозначает номинальный класс наружного диаметра и серию осевой длины.
Производительность по передаточному отношению — Без тормоза
| Соотношение | Пиковый крутящий момент при запуске/остановке (Н·м) | Максимально допустимый средний крутящий момент нагрузки (Н·м) | Номинальный крутящий момент при 2000 об/мин/передаточное число (Н·м) | Пиковая выходная скорость (об/мин) | Номинальная скорость при ½ номинального крутящего момента (об/мин) | Люфт (arcsec) |
|---|---|---|---|---|---|---|
| 51:1 | 267 | 120 | 94 | 55 | 44 | 20 |
| 81:1 | 376 | 185 | 146 | 37 | 29 | 20 |
| 101:1 | 411 | 267 | 169 | 29 | 22 | 10 |
| 121:1 | 436 | 267 | 169 | 24 | 18 | 10 |
| 161:1 | 459 | 267 | 169 | 18 | 12 | 10 |
Производительность по передаточному отношению — С тормозом (-B)
Номинальные показатели крутящего момента и скорости идентичны версии без тормоза; размеры/вес/инерция отличаются (см. выше).
| Соотношение | Пиковый крутящий момент при запуске/остановке (Н·м) | Максимально допустимый средний крутящий момент нагрузки (Н·м) | Номинальный крутящий момент при 2000 об/мин/передаточное число (Н·м) | Пиковая выходная скорость (об/мин) | Номинальная скорость при ½ номинального крутящего момента (об/мин) | Люфт (arcsec) |
|---|---|---|---|---|---|---|
| 51:1 | 267 | 120 | 94 | 55 | 44 | 20 |
| 81:1 | 376 | 185 | 146 | 37 | 29 | 20 |
| 101:1 | 411 | 267 | 169 | 29 | 22 | 10 |
| 121:1 | 436 | 267 | 169 | 24 | 18 | 10 |
| 161:1 | 459 | 267 | 169 | 18 | 12 | 10 |
Приложения
-
Человекоподобные роботы: плечевые/тазобедренные/коленные/голеностопные суставы, требующие герметичного приведения в действие с высоким крутящим моментом
-
Коллаборативные роботы (коботы): плавное, бесшумное движение с избыточностью энкодера
-
Экзоскелеты &и реабилитационные устройства: компактные, высокомоментные соединения с удержание выключения питания (-B)
-
Карданы &усилители; панорамно-наклонные устройства: точное позиционирование с малым люфтом
-
AGV-транспортеры &и; спецтехника: прочный IP65 швы для пыльных или влажных помещений
-
Автомобильная промышленность &и морские механизмы: герметичный привод для вспомогательных систем движения
Подробности

Характеристики привода CRA-RI100-142-PRO-XX: передаточные числа 51–161, передаточное отношение 267–459 N.m Пиковый крутящий момент, двигатель мощностью 1000 Вт, питание 24–48 В, шина CAN, вес 3,8 кг, момент инерции 3601 г·см², разрешение энкодера 17 об/мин.
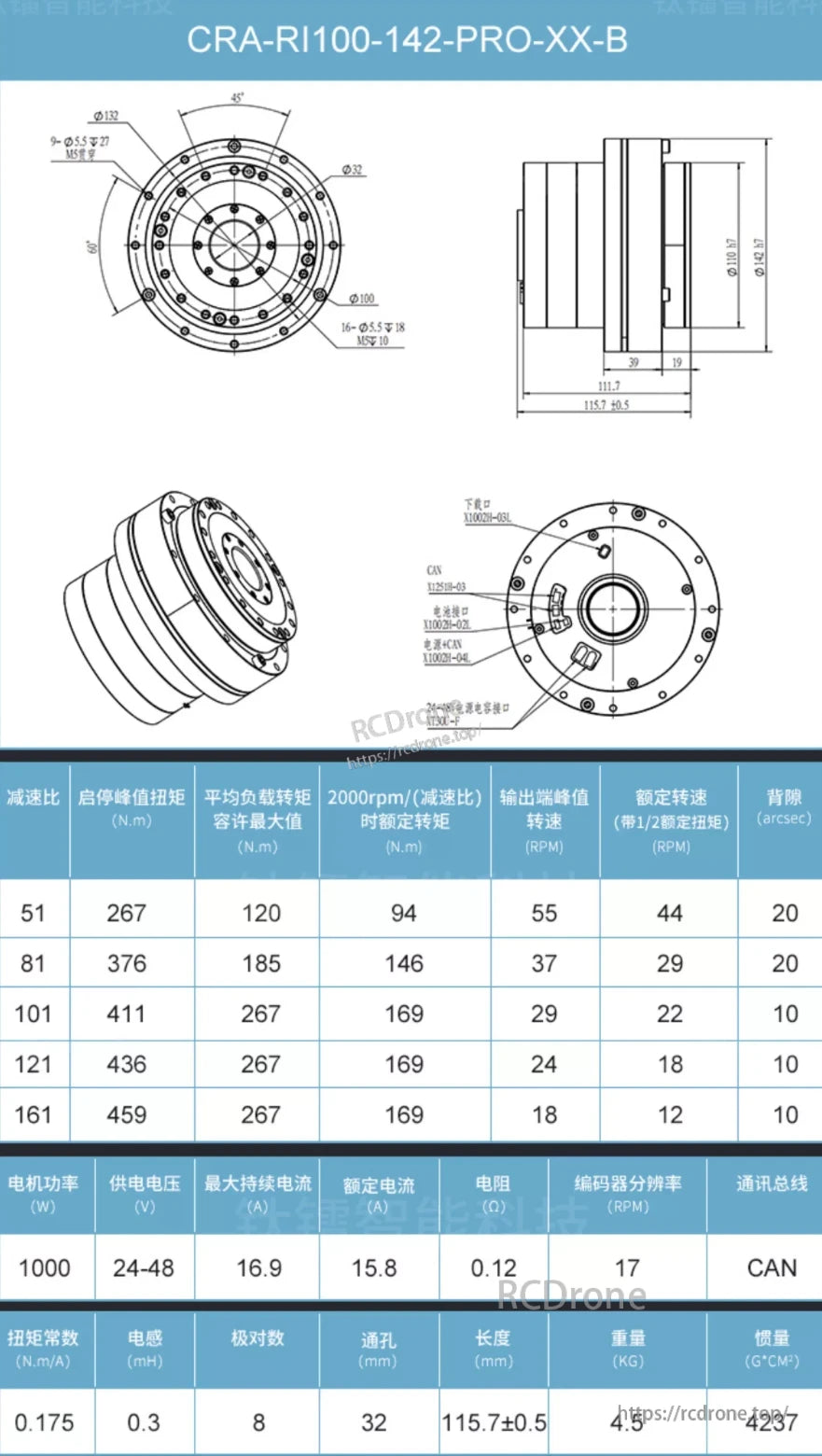
Технические характеристики привода CRA-RI100-142-PRO-XX-B: двигатель мощностью 1000 Вт, напряжение питания 24–48 В, номинальный ток 15,8 А, разрешение энкодера 17 об/мин, шина CAN, вес 4,5 кг, длина 115,7 мм, несколько передаточных чисел с данными о крутящем моменте и скорости.
Related Collections






