Ti5 Robot CRA-RI60-80-PRO-XX Интегрированный модуль соединения робота — Harmonic Drive, 24–48 В, CAN/EtherCAT, 17-битный энкодер
Ti5 Robot CRA-RI60-80-PRO-XX Интегрированный модуль соединения робота — Harmonic Drive, 24–48 В, CAN/EtherCAT, 17-битный энкодер
Ti5 Robot
Не удалось загрузить сведения о доступности самовывоза
Обзор
Робот Ti5 CRA-RI60-80-PRO-XX Компактный интегрированный шарнир с полым валом для гуманоидов, коботов и мобильных манипуляторов. Он сочетает в себе ультратонкий гармонический редуктор, бескаркасный моментный двигатель, сервопривод FOC, и абсолютный магнитный энкодер в одном модуле, предоставляя выход с почти нулевым люфтом, низкий уровень шума и высокая плотность крутящего момента. Шарнир поддерживает МОЖЕТ или EtherCAT, одинарные или двойные энкодеры, и дополнительный удерживающий тормоз. Доступны две длины: стандартная PRO-XX и удлиненная. ПРО-ХХ-Б (более длинный корпус, более высокая инерция ротора, большее сквозное отверстие).
Ключевые особенности
-
Соединение «все в одном»: гармонический редуктор + моментный двигатель + драйвер FOC + абсолютный энкодер.
-
Почти нулевая негативная реакция на выходе: плавное регулирование малых скоростей и низкий акустический шум.
-
Конструкция с полым валом для пропуска кабеля/воздуховода; несколько передаточных чисел.
-
Абсолютный энкодер, 17-бит, память положения при отключении питания; опционально двойной кодер версия.
-
Коммуникация: МОЖЕТ или EtherCAT по выбору.
-
Власть: 24–48 В, интегрированный драйвер, класс мощности двигателя 300 Вт.
-
Дополнительный удерживающий тормоз; IP/водонепроницаемый &усилитель; низкотемпературный доступна настройка.
-
Готово к применению для подвесов, гуманоидов, коботов, промышленного оборудования, патрульных роботов и морских устройств.
Технические характеристики
Электрические &Управление (общее для PRO-XX/PRO-XX-B)
-
Номинальная мощность двигателя: 300 Вт
-
Напряжение питания: 24–48 В постоянного тока
-
Максимальный постоянный ток: 6,7 А; номинальный ток: 5 А
-
Фазовое сопротивление: 0,33 Ом
-
Постоянная крутящего момента: 0,096 Н·м/А
-
Индуктивность: 0,074 мГн
-
Пары полюсов: 10
-
Кодер: 17-битный абсолютный; варианты с одним/двумя энкодерами
-
Автобус: МОЖЕТ (стандартный) или EtherCAT (вариант)
Механический (полый вал)
-
Сквозное отверстие (PRO-XX): Ø15 мм
-
Сквозное отверстие (PRO-XX-B): Ø18 мм
-
Длина (PRO-XX): 70,4 ± 0,5 мм; масса ≈1,01 кг; инерция ротора ≈441 г·см²
-
Длина (PRO-XX-B): 92,9 ± 0,5 мм; масса ≈1,17 кг; инерция ротора ≈595 г·см²
-
Монтаж: круг болтов спереди (полый выход); встроенный волновой редуктор
-
Опции: стояночный тормоз; одинарный/двойной энкодер; CAN/EtherCAT; водонепроницаемость &низкотемпературный пакет
Варианты редукторов &производительность усилителя (выходная сторона)
Люфт: настолько низкий, насколько 10–20 угловых секунд в зависимости от соотношения.
| Коэффициент уменьшения | Пиковый крутящий момент при запуске/остановке (Н·м) | Макс. средний крутящий момент нагрузки (Н·м) | Номинальный крутящий момент при 2000 об/мин/передаточное число (Н·м) | Пиковая скорость (об/мин) | Номинальная скорость при ½ номинального крутящего момента (об/мин) | Люфт (arcsec) |
|---|---|---|---|---|---|---|
| 51:1 | 42 | 32 | 19.8 | 82 | 68 | 20 |
| 81:1 | 53 | 33 | 27.5 | 51 | 43 | 20 |
| 101:1 | 66 | 49 | 30 | 41 | 34 | 10 |
| 121:1 | 66 | 49 | 30 | 32 | 24 | 10 |
Примечания:
• Приведенные выше данные взяты из паспортов продукции CRA-RI60-80-PRO-XX и ПРО-ХХ-Б.
• PRO-XX-B использует ту же таблицу крутящего момента/скорости; он обеспечивает большее сквозное отверстие и более высокую инерцию за счет более длинного корпуса.
Приложения
-
Гуманоид &сервисные роботы: плечевые, локтевые, тазобедренные, коленные, голеностопные суставы с высокой плотностью крутящего момента.
-
Коллаборативные роботизированные руки: точные оси с малым люфтом для плавного регулирования усилия.
-
Карданы &усилители; панорамирование-наклонные устройства: тихое, стабильное отслеживание на низкой скорости с памятью абсолютного положения.
-
Промышленное оборудование &манипуляторы AGV/AMR: компактный интегрированный привод для ограниченного пространства.
-
Патрульные и инспекционные роботы; морские/судовые устройства (с водонепроницаемым вариантом).
Подробности
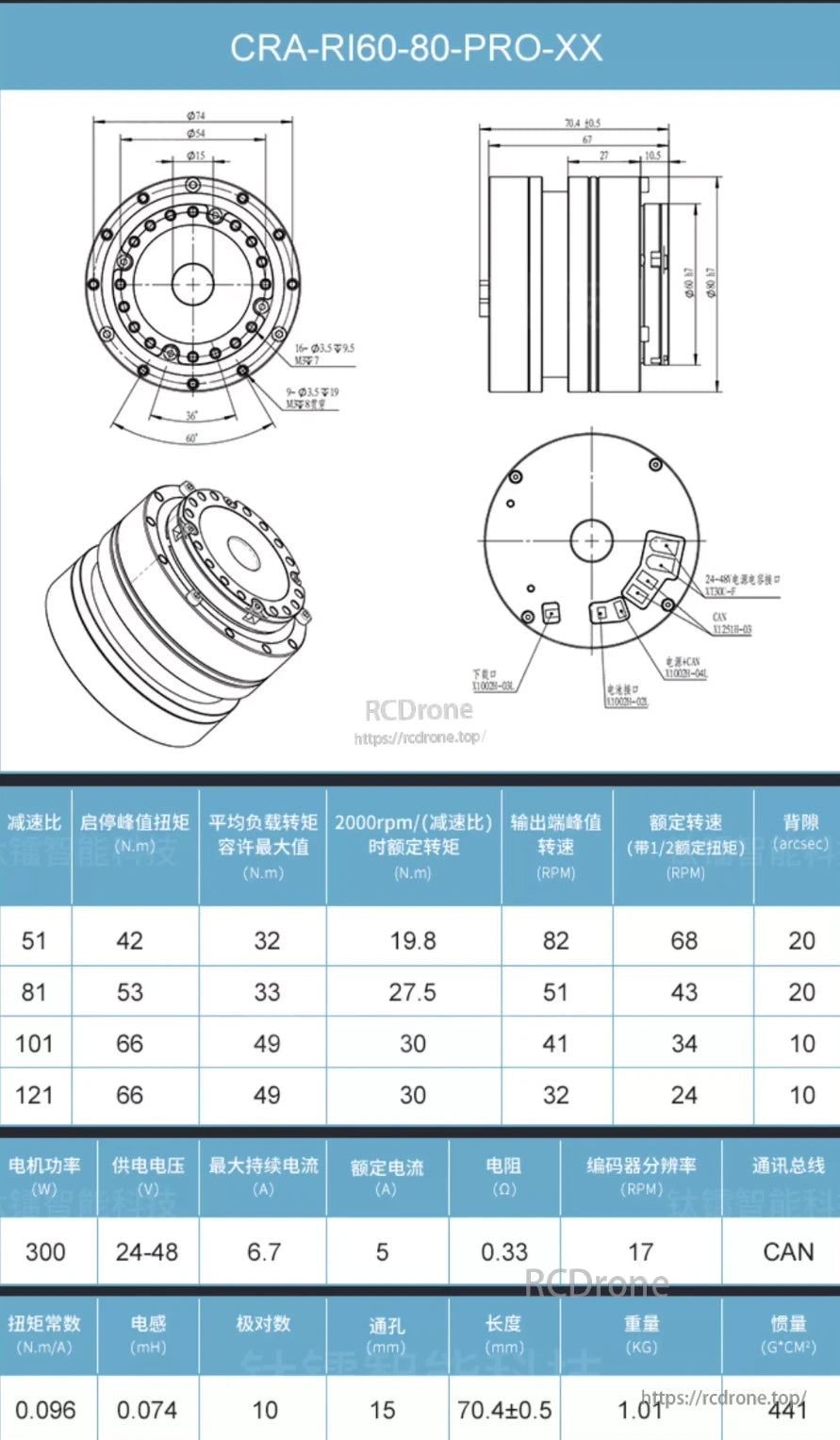
Технические характеристики модуля сочленения робота CRA-RI60-80-PRO-XX: двигатель мощностью 300 Вт, входное напряжение 24–48 В, шина CAN, энкодер 17 CPR, длина 70,4 мм, вес 1,01 кг, несколько передаточных чисел с предоставлением данных о крутящем моменте и скорости.
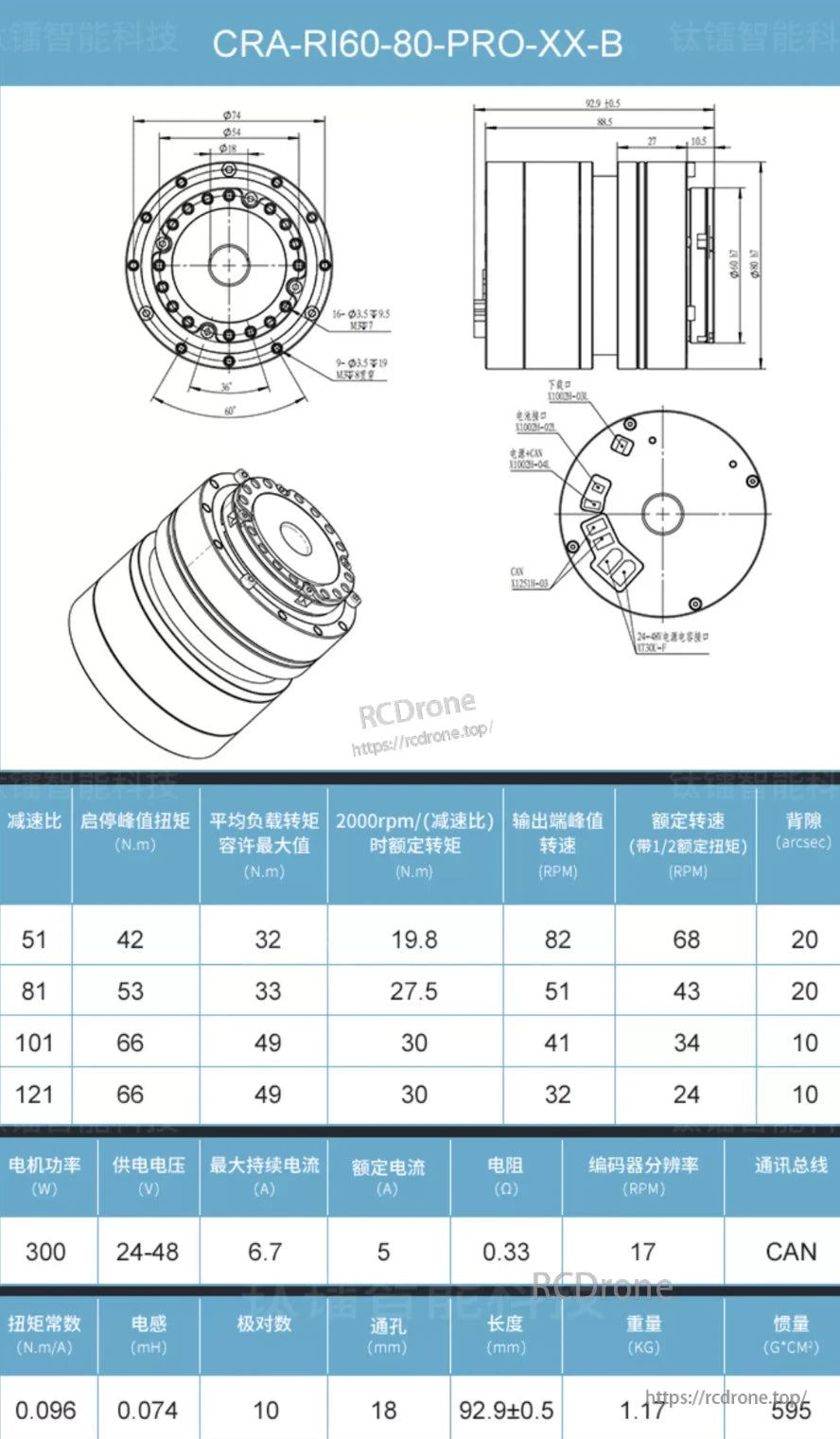
Модуль роботизированного сочленения CRA-RI60-80-PRO-XX-B с двигателем мощностью 300 Вт, питанием 24–48 В, коммуникацией по CAN, разрешением энкодера 17 об/мин и несколькими передаточными отношениями. Ключевые характеристики включают крутящий момент, скорость, ток и габариты.
Related Collections