








WitMotion HWT601-AGV-485 IMU RS485 Modbus, IP67, 200 Гц – 6-осевой акселерометр, гироскоп, инклинометр, поддержка ROS/Matlab
WitMotion HWT601-AGV-485 IMU RS485 Modbus, IP67, 200 Гц – 6-осевой акселерометр, гироскоп, инклинометр, поддержка ROS/Matlab
WitMotion
Не удалось загрузить сведения о доступности самовывоза
Обзор
Датчик WitMotion HWT601-AGV-485 представляет собой 6-осевой датчик положения/направления, предназначенный для AGV-роботов, дронов и автономных платформ. Он сочетает в себе 3-осевое ускорение + 3-осевую угловую скорость и выводит угол по 3 осям &и кватернион через RS485 (Modbus) с частотой до 200 Гц. Модуль оснащен динамической фильтрацией Калмана, высокоточной калибровкой поворотного стола, автоматическим/ручным получением смещения, резервным питанием для сохранения направления при отключении питания и водонепроницаемым/пылезащищенным корпусом IP67. Он также поддерживает многоуровневую каскадную систему (до 32 единиц) для синхронизированного измерения положения.
Ключевые особенности
-
Высокоточный угол: точность XY 0.1°; точность Z 0.1° (HWT601-AGV-485) / 0.15° (WT601-AGV-485).
-
Стабильный смещение гироскопа: XY 5°/ч; Z 2°/ч (HWT601-AGV-485) / 5°/ч (WT601-AGV-485).
-
Широкий вход 9–36 В, рабочий ток ≈ 8 мА @12 В.
-
RS485 Modbus, скорость 4,800–230,400 бит/с.
-
Сэмплирование: запрос-ответ чтение до 200 Гц.
-
Алгоритм: слияние фильтра Калмана и специализированный алгоритм направления AGV.
-
Программное обеспечение: бесплатный пакет для ПК с живыми панелями управления, графиками, 3D визуализацией (автомобиль/сфера/куб/плоскость), конфигурацией (смещение, угол отсчета, калибровка акселерометра, коэффициенты масштабирования), запись данных &и прямое сохранение, а также импорт в Matlab.
-
Дружественный к разработчикам: примеры программ и поддержка кода для ROS, Linux, C/C#, Python.
-
Экологические: IP67, -40~80 °C (показан вариант таблицы -40~85 °C).
-
Каскадирование: до 32 датчиков по RS485 для одновременного измерения угла наклона.
Руководство по установке
-
Установите датчик на плотной, ровной, стабильной поверхности; неровные основания вызывают угловую ошибку (см. РИС.1–2).
-
Держите ось датчика параллельно измеряемой оси; избегайте углов между осями (см. РИС.3–4).
-
Эта модель поддерживает только горизонтальную установку.
Программное обеспечение &и визуализация
-
Мощная панель данных (углы, скорость, ускорение, магнитное поле, кватернионы, порты, температура, напряжение и т.д.).
-
Панель конфигурации: скорость передачи, адрес устройства, автоматическое получение смещения, сброс по оси Z, калибровка ускорения, эталон угла, ручная калибровка положительных/отрицательных значений и коэффициенты масштабирования.
-
3D модели для интуитивного мониторинга движения и кривые в реальном времени с динамическими обновлениями.
-
Просмотр сырых данных и сохранение файлов для легкого сбора; поддерживается импорт анализа в Matlab.
-
Демонстрации ROS IMU INS: визуализация отслеживания положения и отображение данных о положении (тангаж/крен/рыскание, угловая скорость, линейное ускорение).
html
Спецификации
Интерфейс &и производительность
| Товар | HWT601-AGV-485 | WT601-AGV-485 |
|---|---|---|
| Интерфейс / Протокол | RS485 / Modbus | RS485 / Modbus |
| Скорость передачи данных | 4,800–230,400 бод | 4,800–230,400 бод |
| Выходные данные | 3-осевая ускорение, угловая скорость, угол, кватернион | То же самое |
| Частота выборки | До 200 Гц (запрос-ответ) | До 200 Гц |
| Точность угла XY | 0.1° | 0. 1° |
| Точность угла (ошибка вращения на 360°) | 0.1° | 0.15° |
| Диапазон ускорения / разрешение | ±4 g / 0.0001 g/LSB | Такой же |
| Диапазон гироскопа / разрешение | ±250 °/с / 0.0122 (°/с)/LSB | Такой же |
| Диапазон угла / разрешение | XZ: ±180°; Y: ±90° / 0.0059° | Такой же |
| Нестабильность смещения гироскопа (XY / Z) | 5°/ч / 2°/ч | 5°/ч / 5°/ч |
| Температурный коэффициент (XYZ) | 0.002°/°C | 0.002°/°C |
Электрические, механические &и окружающая среда
-
Напряжение питания: 9–36 V; Рабочий ток: ≈ 8 мА (12 V)
-
Размеры: 55 × 36.8 × 24 мм; Длина кабеля: 1 м
-
Защита: IP67
-
Рабочая температура: -40~80 °C (вариант таблицы также показывает -40~85 °C)
-
Установка: Только горизонтальный монтаж
-
Каскадирование: До 32 единиц по RS485
Области применения
AGV/AMR и мобильные роботы, дроны/UAV, беспилотные логистические транспортные средства и модули восприятия автономного вождения.
Наименование модели &и выбор
-
HWT601-AGV-485 – более высокая точность по оси Z (0.1°) и меньшая нестабильность смещения по оси Z (2°/ч).
-
WT601-AGV-485 – стандартные характеристики по оси Z (0.15°, 5°/ч).
Выберите HWT601, когда точность по оси Z критична.
Детали

Высокоточный 6-осевой датчик положения с 3-осевым ускорением, угловой скоростью, углом и кватернионом. Включает алгоритм определения направления AGV, защиту IP67, фильтрацию Калмана, автоматическое получение смещения и поддержку программного обеспечения для ПК.
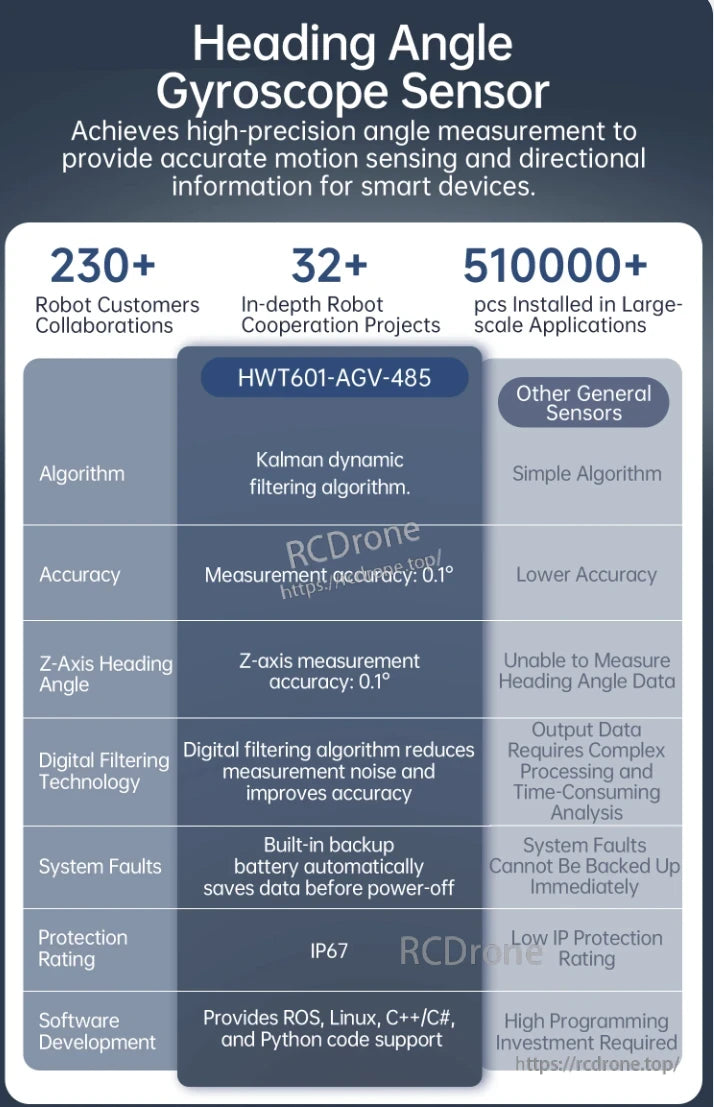
Датчик угла направления гироскоп HWT601-AGV-485 предлагает высокоточное измерение угла с фильтрацией Калмана, точностью 0.1°, цифровым подавлением шума, защитой IP67 и поддерживает ROS, Linux, C++ и Python. Более 230 сотрудничеств с роботами и более 510,000 установок.
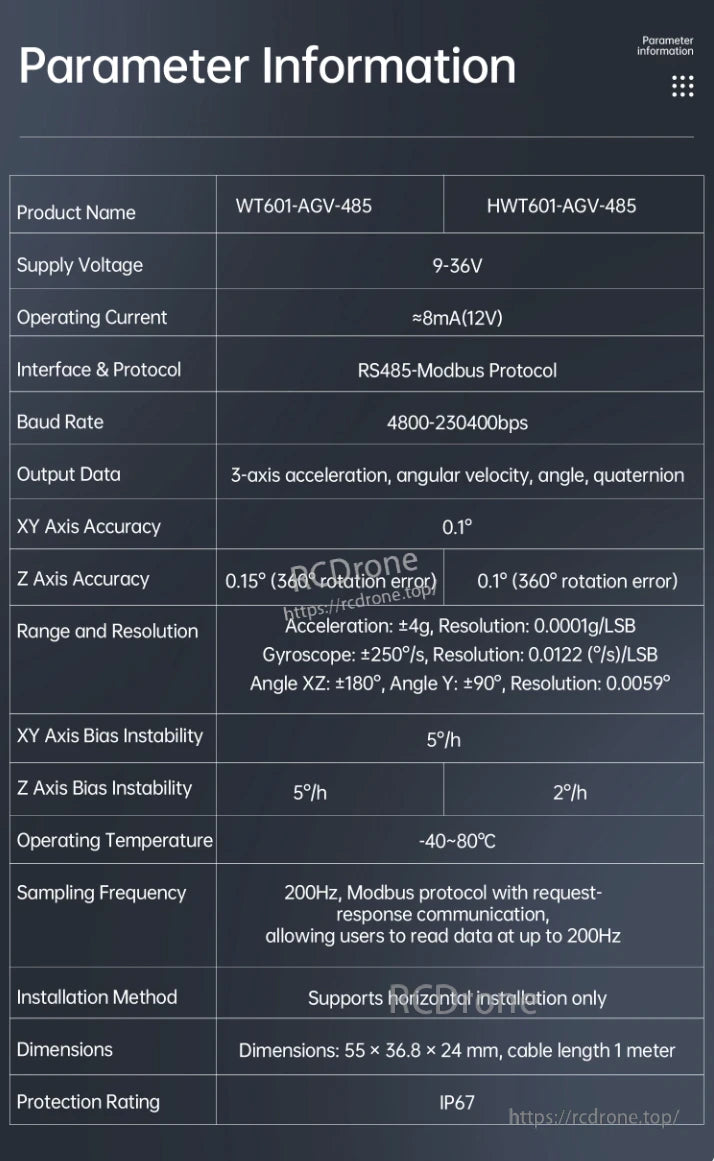
IMU HWT601-AGV предлагает питание 9-36В, RS485-Modbus, частоту дискретизации 200Гц, ускорение ±4g, гироскоп ±250°/с, степень защиты IP67, рабочую температуру от -40 до 80°C. Обеспечивает точные данные по 3 осям с высоким разрешением.
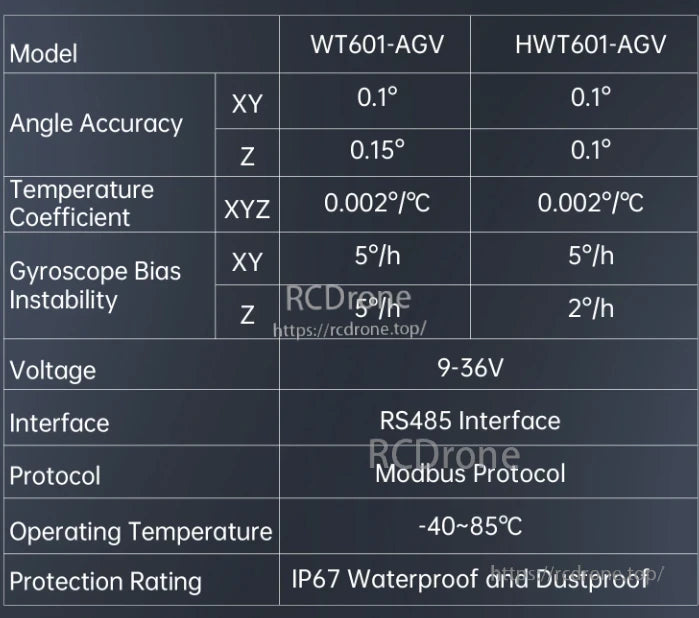
IMU HWT601-AGV предлагает точность угла 0.1° по осям XY и Z с температурным коэффициентом 0.002°/°C по всем осям XYZ. Нестабильность смещения гироскопа составляет 5°/ч (XY) и 2°/ч (Z). Он работает при напряжении 9–36В, использует RS485 с Modbus и функционирует в диапазоне температур от -40 до 85°C. Имеет степень защиты IP67, обеспечивая водонепроницаемую и пылезащищенную защиту. Вариант WT601-AGV имеет аналогичные характеристики, но точность по оси Z составляет 0.15° и нестабильность смещения по оси Z - 5°/ч. Оба модели обеспечивают надежную работу в сложных условиях.
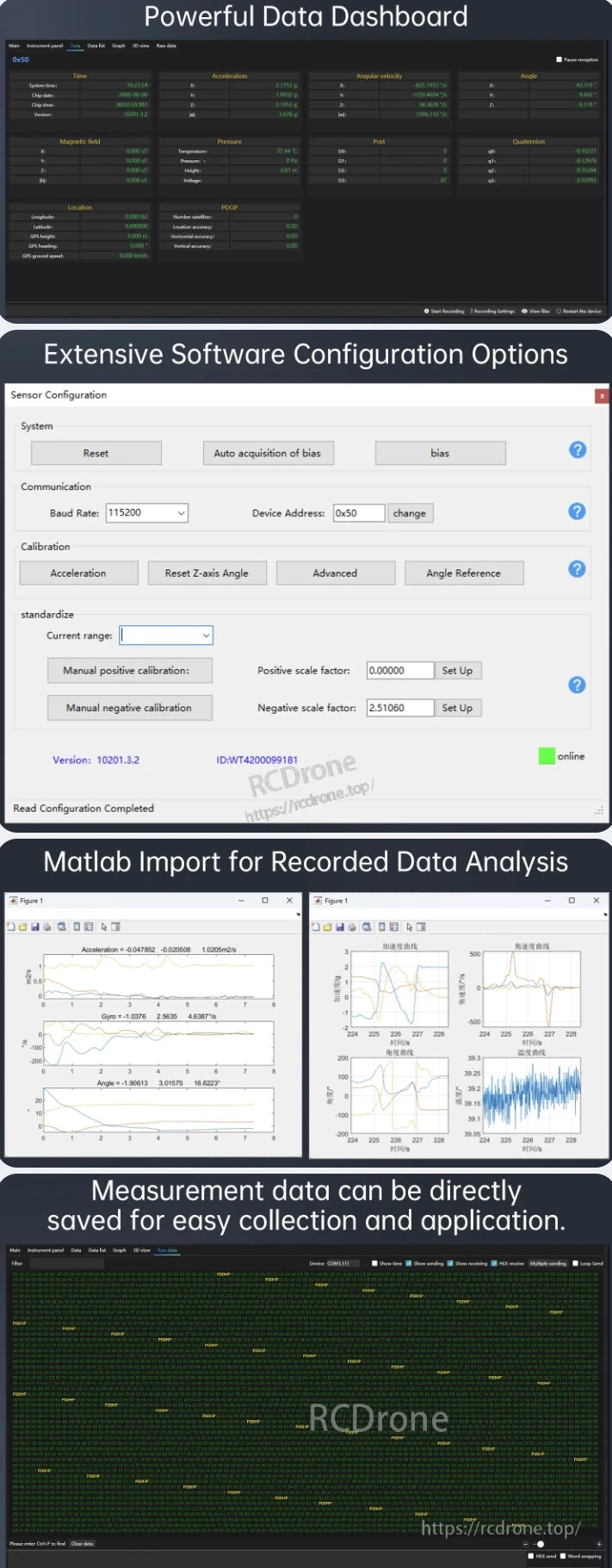
Мощная панель данных с показаниями датчиков в реальном времени, обширной конфигурацией программного обеспечения, импортом MATLAB для анализа и прямым сохранением данных для легкого сбора и применения.
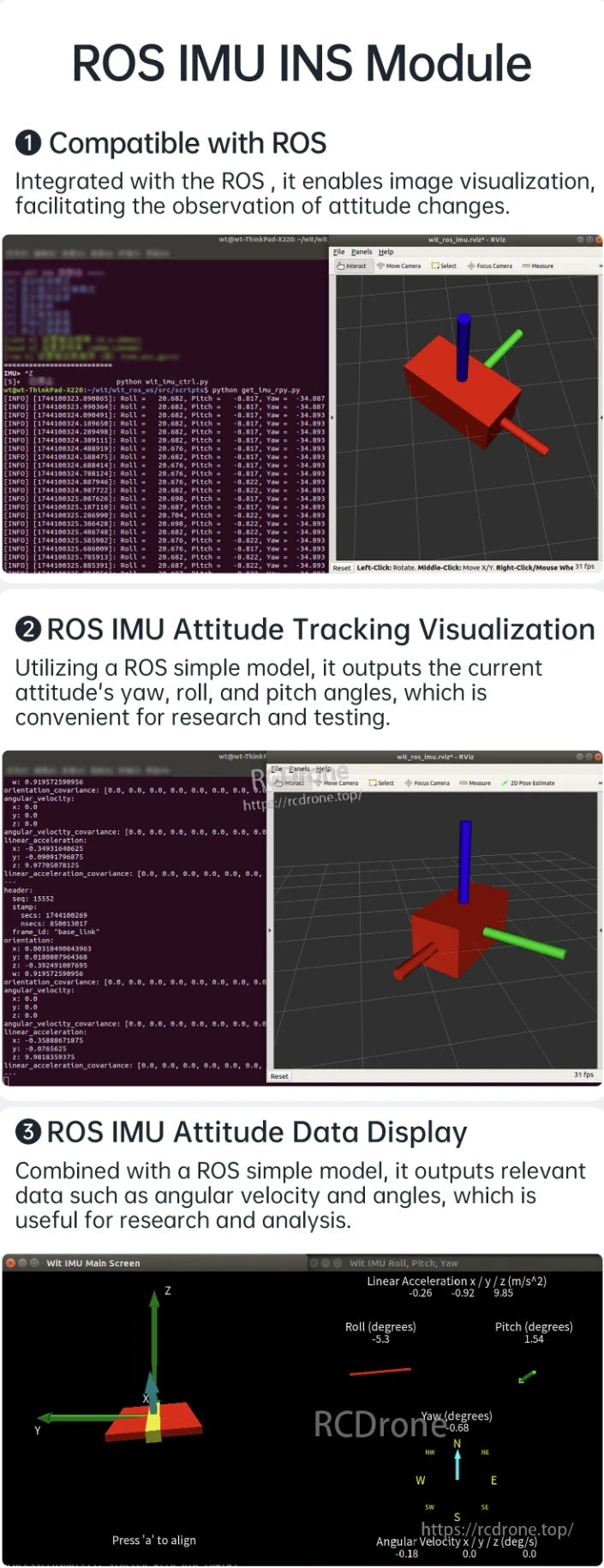
Модуль ROS IMU INS предлагает совместимость с ROS, визуализирует отслеживание положения и отображает данные о крене, тангаже, рыскании, угловой скорости и линейном ускорении в реальном времени для исследований и анализа.
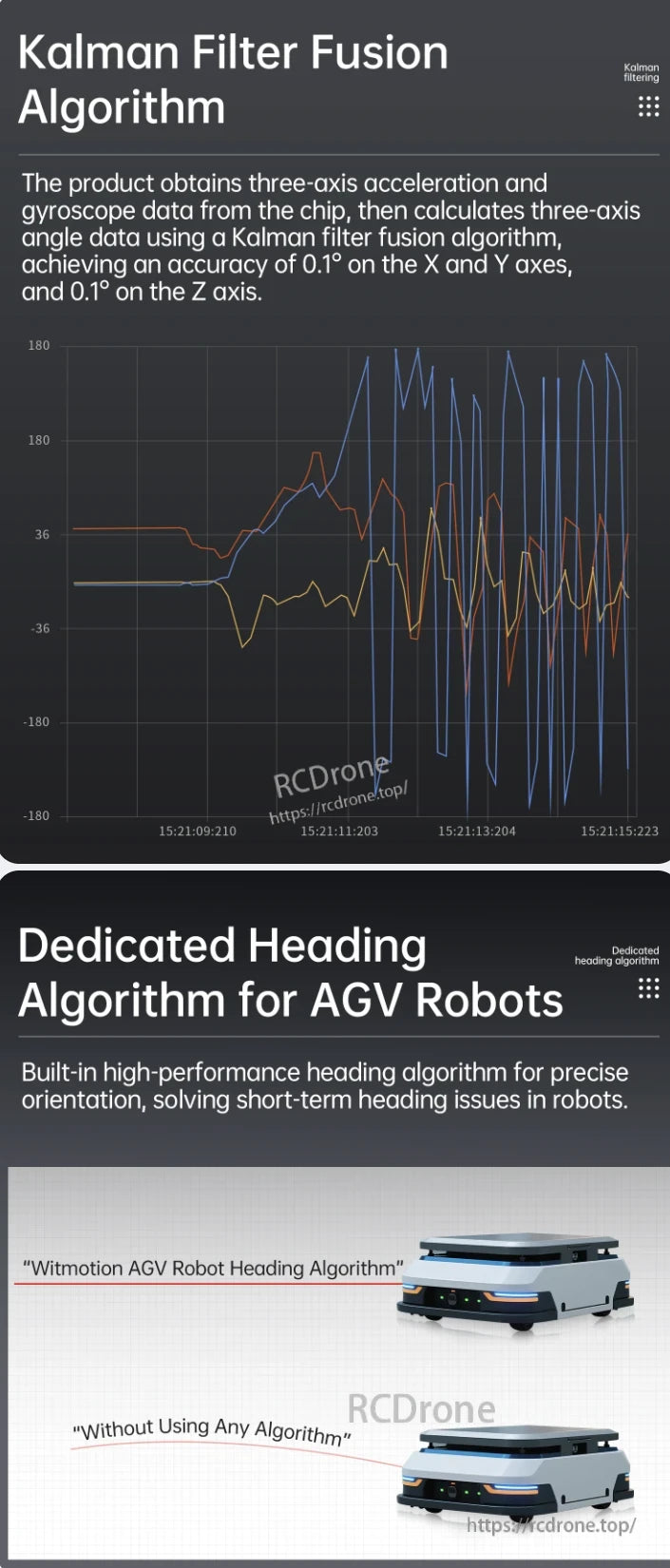
IMU WitMotion HWT601 AGV обеспечивает точные данные об углах по трем осям с точностью 0,1° с использованием слияния фильтров Калмана. Его специализированный алгоритм направления обеспечивает стабильную ориентацию робота, значительно улучшая производительность по сравнению с системами без таких алгоритмов.
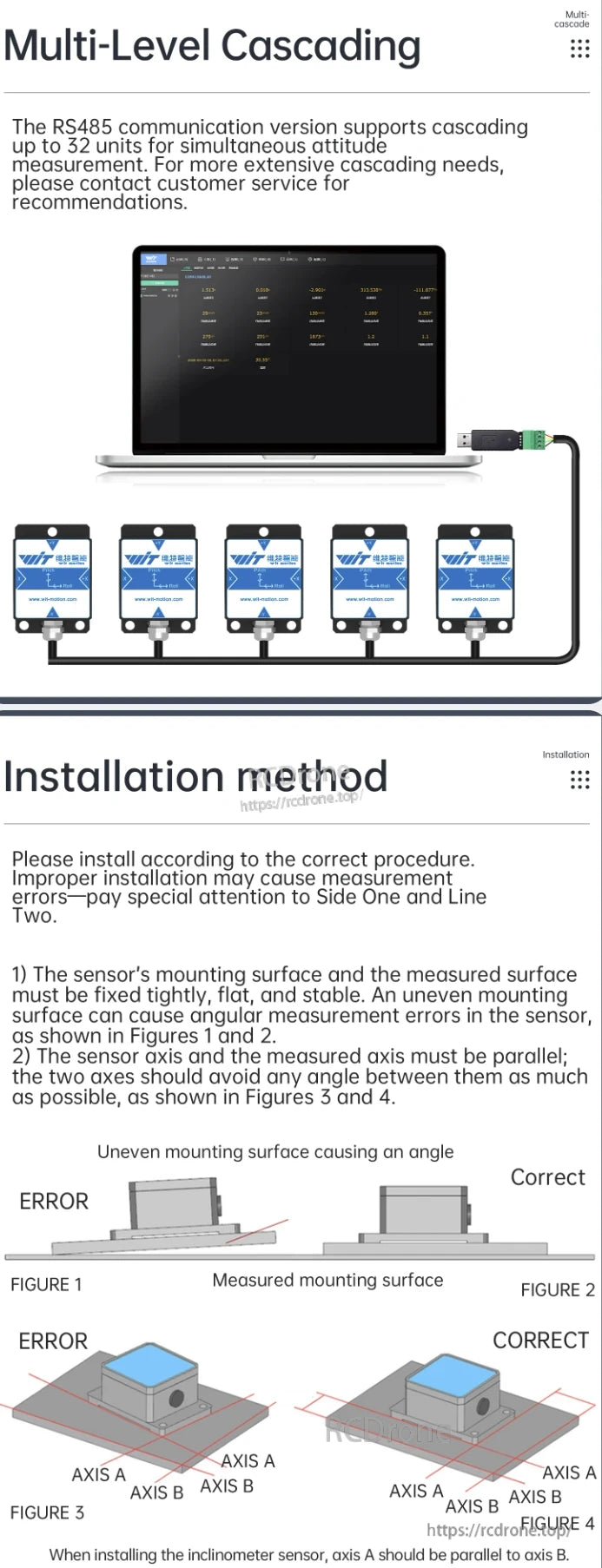
IMU WitMotion HWT601 AGV поддерживает до 32 каскадных единиц через RS485 для измерения положения. Обеспечьте ровное, стабильное крепление и выровненные оси для точности.
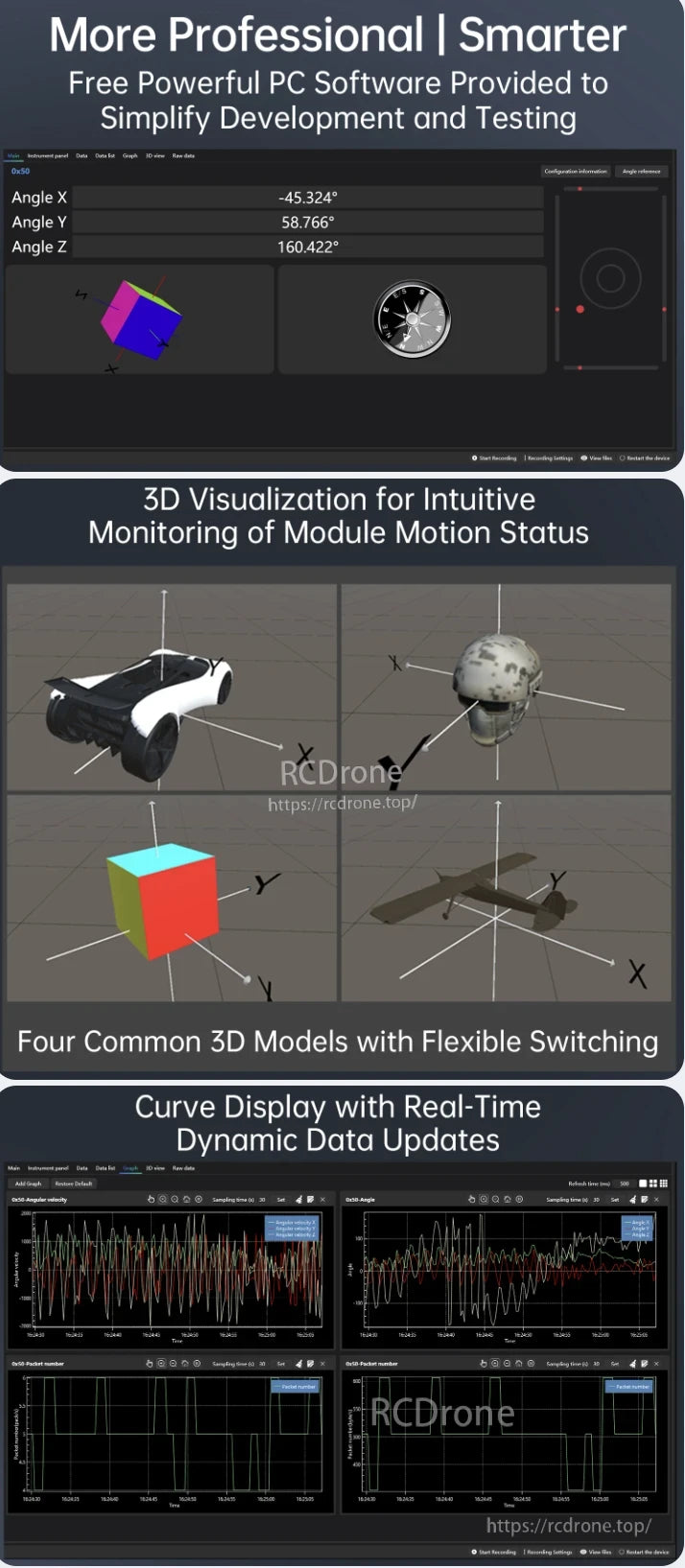
Профессиональное программное обеспечение для ПК для IMU WitMotion HWT601 AGV предлагает визуализацию в реальном времени в 3D, мониторинг углов и отображение динамических кривых.Особенности включают интуитивное отслеживание движения, гибкое переключение моделей и обновления данных в реальном времени для эффективной разработки и тестирования.
Сопроводительная документация включает примерные программы для STM32, Arduino, 51 UART, Windows C++ и Matlab, чтобы помочь разработчикам применять продукт с помощью учебных пособий и образцов кода.
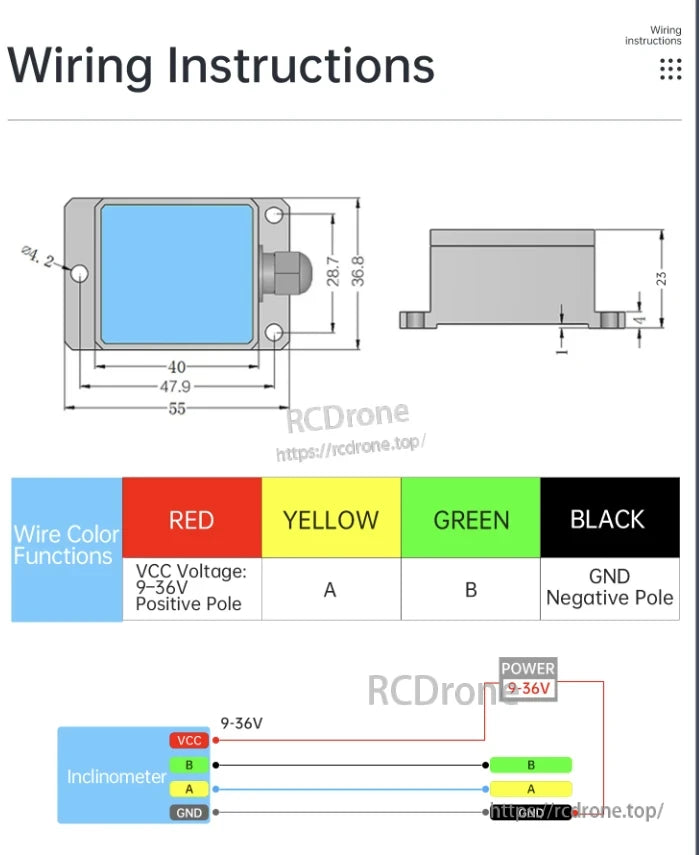
Схема подключения WitMotion HWT601 AGV IMU: красный (9-36V), желтый (A), зеленый (B), черный (GND). Размеры и схема подключения предоставлены.

WitMotion HWT601 AGV IMU для дронов, автономного вождения, мобильных роботов и беспилотных логистических транспортных средств.
Related Collections








